Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
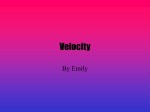
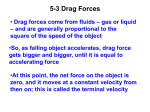
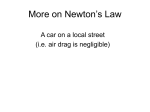
Modelling of 3D Net Structures Exposed to Waves and Current Pål F. Lader, Birger Enerhaug, Arne Fredheim and Jørgen Krokstad SINTEF Fisheries and Aquaculture, Trondheim, Norway ABSTRACT: A dynamic model for 3D net structures exposed to waves and current is proposed. The model is based on a super-element formulation where the net structure is divided into four-sided super-elements interconnected in each corner node. The hydrodynamic and structural forces are calculated on each super-element, and the total forces are collected in each node where the equation of motion are solved. The hydrodynamic forces on the net is calculated using formulas based on earlier empirical results for net panels in steady current, and are assumed to be drag dominated. The structural forces are calculated by assuming that each element consists of six nonlinear springs, interconnecting each node to the other three. The model is partially validated by comparing it with experimental measurements of the drag force on a cylindrical net structure exposed to accelerating and steady uniform current. The comparison show that the agreement is within +/- 20% for Reynolds numbers in the same range as for which the hydrodynamic load model was derived. For lower Reynolds numbers the discrepancy increases. 1 INTRODUCTION The fish farming and aquaculture industry are expanding and the demand for suitable locations for fish farms is increasing. In Norway, as well as in other countries, this calls for new technological challenges, as fish farms are being installed at locations that are more exposed to waves, wind and current. In the future more of the fish farms will be located offshore, as the number of suitable near-shore locations are limited. A move towards the use of offshore locations are also motivated by environmental and aesthetic aspects of the industry, and future fish-farms will most likely be in the form of large scale offshore installations, rather than small near-shore farms. Before installation of such structures it is however necessary to assess the behaviour of the structure when it is exposed to the environmental forces typical of the location. In contrast to large floating oil installations which can be assumed to be rigid, the fish farms are complex flexible structures with an infinite number degrees of freedom. This makes it necessary to develop new numerical tools for simulating the behaviour of such structure. 2 MODEL DESCRIPTION The model proposed her is a fully 3D dynamic model where the equations of motion are solved in the time domain. The present model is based on a model of a single net panel (Lader et. al., 2001a and Lader et. al., 2001b), and is a direct extension of this work. Net model Waves Elements Current Nodes Fig. 1: Model overview 2.1 Overview The net structure is modelled by using elements and nodes (Fig. 1). The elements are four-sided with a node in each corner. Hydrodynamic and structural forces are calculated for each element based on the wave particle velocity, current velocity, structural velocity, and node positions. A mass (inertia) and a weight (gravity) are associated with each node, and the nodes can be either free, fixed or have their motion prescribed. This enables, for example, selected nodes to be fixed or connection to other structures which dominates the motion. Movement of the free nodes are not restricted, and the node points are allowed full 3D movement. The forces on each element are distributed equally to its four nodes, and the equation of motion ( F = ma ) is evaluated in each node, yielding the acceleration. The position and the velocity of the nodes are then found by time integrating the acceleration. 2.2 Hydrodynamic Forces The hydrodynamic forces are divided into drag ( F D )1 and lift ( F L ) force, and are calculated on each individual element. The drag force is parallel to the velocity direction ( F D || U ), and the lift force is perpendicular to the flow direction ( F L ⊥ U ). The drag and lift force are calculated from: 1 F D = --- ρC D A U 2 n D 2 (1) 1 F L = --- ρCL A U 2 n L 2 (2) where ρ is the mass density of water, C D and C L are the drag and lift coefficients respectively, A is the element area and U is the relative velocity between the fluid and the element. n D and nL are the unit vectors in the direction of the drag and lift force respectively. x1 x center A1 A4 x2 A2 A3 x3 x4 (a) (3) U = U w + Uc – Us where U w is the wave particle velocity, U c is the current velocity and U s is the structural velocity (the velocity of the element). The wave particle velocity is calculated using linear, regular wave theory. The velocity U is taken to be constant over the whole area of the element, and U is evaluated in the element centre. The wave and current is assumed not to be disturbed by the structure, and this means that shielding effects are not taken into account in the model. The position of the element centre x center (Fig. 2a) is calculated by taking the mean value of the node positions of the elements four nodes ( x 1 , x 2 , x 3 and x 4 ): 1 x center = --- ( x 1 + x 2 + x 3 + x 4 ) 4 (4) The elements are four sided, and since the nodes are free to move in three dimensions the elements are not necessarily plane. To calculate the element area the element is therefore divided into four triangles, and the total element area is take to be the sum of the areas of the four triangles: A = A 1 + A 2 + A3 + A 4 (Fig. 2a). The element normal unit vector ( nen ), which is used to calculate the lift unit vector ( nL ), is found by taking the cross product of two unit vectors parallel to the diagonals in the element. The diagonal unit vectors ( n13 and n24 ) are given by: x 1 – x3 n 13 = ------------------x 1 – x3 (5) x 2 – x4 n 24 = ------------------x 2 – x4 (6) and the element normal unit vector are then given by: n 13 × n 24 n en = -----------------------n 13 × n 24 (7) The direction of n en is by definition in the positive flow direction. The unit vectors for drag and lift are then given by: x1 n en n 13 x2 n 24 x4 x3 (b) U n D = ------U (8) ( U × n en ) × U n L = -----------------------------------( U × n en ) × U (9) The drag and lift coefficients ( CD and C L ) are calculated using formulas found by Aarsnes et al. (1990). These formulas are based on both theoretical work and comprehensive model tests (Rudi et al., 1988). C D and C L are given by: 2 The velocity U is the relative velocity between the Bold type faces indicates vectors 3 CD = 0.04 + ( – 0.04 + S – 1.24S + 13.7S ) cos ( α ) 2 Fig. 2: Element area (a) and element normal vector (b) calculation for an element 1. fluid and the net: 3 C L = ( 0.57S – 3.54S + 10.1S ) sin ( 2α ) (10) (11) where S is the solidity of the net, which is the ratio between the solid area of the net ( As ) and the total area enclosed by the net ( A ): S = As ⁄ A . α is the angle of attack, and is defined to be the angle between the direction of U and the normal vector of the element (Fig. 3). The 1 F 21 F 41 12 F 31 n n en 14 α F 12 13 2 F 32 F 42 U 23 24 F 24 F 13 F14 Fig. 3: The angle of attack ( α ). 4 formulas should not be used for S higher than 0.35. The model tests on witch the formulas are based were done with Reynolds numbers in the range 1400 to 1800, and the Reynolds number dependency of the drag and lift forces are thus not included in the formulas. Also note that these formulas are strictly valid for stationary flow only. The element area A is not constant, but varies with the deformation of the element. Consequently the solidity S also varies accordingly since the solid area of the net element ( A s ) is constant. The solidity used to calculate the hydrodynamical forces on each net elements must therefore be corrected for on each individual element based on the instantaneous area of that element: A0 S = S 0 -----A F 34 2.3 Structural Forces The elements are modelled structurally as shown in Fig. 4. Each node is connected with the other nodes through a non-linear spring. Each spring is assumed to have the following force - elongation relationship: 2 Fs = C 2 ε + C 1 ε ε>0 Fs = 0 ε≤0 (13) where F s [N] is the structural force, and ε [-] is the global elongation. The global elongation is given by ε = ( l – l0 ) ⁄ l 0 where l0 is the un-deformed length and l is the deformed length of the panel. C 2 and C 1 are constants describing the force/elongation characteristics of each spring. In each four sided element there are six springs, yielding twelve force contributions, three in each node. The main reason for introducing the diagonal springs is to be able to model both square and diamond oriented meshes F 43 34 3 Fig. 4: The structural model of the element. Node numbers are indicated in circles, and spring numbers in squares. without having to re-grid the net. The force in the spring between node n and node m ( Fnm ) are calculated from the following equations: (14) F nm = F nm n nm here F nm is the force magnitude, and n nm is the unit directional vector for the force. The force magnitude is calculated from: 2 F nm = C 2 nm εnm + C 1 nm εnm ε nm > 0 F nm = 0 ε nm ≤ 0 (12) where S and A is the instantaneous solidity and area of the element respectively, and S 0 and A 0 is the solidity and area of the net when it is undeformed. The hydrodynamical forces acting on each element is distributed equally to each element node, where the equation of motion is solved. F 23 (15) where the elongation ε nm is given by: lnm – l 0nm x n – x m – x 0n – x 0m εnm = ----------------------- = ---------------------------------------------------l 0nm x 0n – x 0m (16) where x 0n and x 0m is the position of the nodes when the element is undeformed, and no internal forces are acting in the element. x n and x m are the instantaneous position of the nodes as indicated previously (Fig. 2a). The unit directional vector is given by: xn – xm n nm = -------------------xn – xm (17) 2.4 Equation of Motion The structural and hydrodynamical forces are calculated in each element, and the forces are then collected in each node, where the equation of motion is evaluated. For one node surrounded by the four elements e 1 , e 2 , e 3 and e 4 the total structural and hydrodynamical forces in the node is given by (Figs. 5 and 6): e1 e1 e1 e2 e2 e2 e3 F 21 e3 F31 e3 F 41 e4 F 12 e4 F 32 e4 F42 F structural = F 13 + F23 + F 43 + F 14 + F 24 + F34 + + + + + + e1 e2 e2 1 e1 Fhydrodynamic = --- ( F L + F D + F L + F D 4 e3 e3 e4 e4 + F L + F D + FL + F D ) (18) (19) 3 The equation of motion now becomes: (20) Fstructural + F hydrodynamic + wgn g = ma where w and m is the weight and mass respectively associated with the node, and ng is the gravity unit vector equal [ 0, 0, – 1 ] . Element e1 e1 F 13 e2 F 14 e4 F 12 e3 e4 F42 Element e4 e4 F32 Element e2 e2 F24 e1 e1 F 43 F 23 The numerical model was validated by comparing numerical simulations with physical experiments. The behaviour of a cylindrical net structure exposed to accelerating and steady current was simulated using the numerical model, and physical experiments were carried out at the North Sea Centre Flume Tank in Hirtshals, Denmark. The tank, which is the second largest flume tank in the world, is filled with fresh water and has an observation/measuring section of 21.3x 2.7 x 8 m (LxHxW). This size has made it possible to use rather large models with full-sized netting panels in the tests. 3.1 Laboratory Setup e2 F 34 F 21 e3 F 41 EXPERIMENTAL VALIDATION e3 F 31 Load cells Element e3 1.435m Fig. 5: Structural forces in one node. e1 FL e1 FD Element e1 1.435m Hoop e2 FL e2 FD e2 1 e1 1--- F --- F Element 4 L 4 L 1 e2 e 1--F 2 --- F 4 D 4 D e4 1 Element --- F 1 e3 --- F 4 D1--- e4 e3 F 1 e3 4 L 4 L --- F e3 Element 4 D FL e4 e1 e4 FD e4 FL Bottom weights e3 FD Fig. 6: Hydrodynamical forces in one node. Fig. 7: Model and general setup. 2.5 Time Integration From the equation of motion the acceleration of each element is found. To calculate the movement of the node, the acceleration is integrated twice: The model is composed of a hoop (or ring), a net and a number of weights attached to bottom of the net. The top of the net is mounted on the hoop, which is kept in a fixed position during each test. The weights are suspended around the bottom opening of the net, in order to stretch the net and maintain its shape under the influence of water flow (current). The hoop is made of stainless steel and has the following dimensions: hoop diameter 1.435 m (centre line to centre line) and rod diameter 0.025 m (diameter of the crosssection). The net is made up of two panels which are joined together in the centre line of the cage. Each panel is 81 meshes high and 125 meshes wide. With joining meshes included, the total number of meshes in circumferential direction is 252. The netting material is nylon with a mass u = x = ∫ a dt ∫ u dt = ∫ ∫ a dt dt (21) The numerical integration is performed by using the ode15s routine implemented in the MATLAB (v 6.1) software package (Shampine and Reichelt, 1997). ode15s is a variable order solver based on the numerical differentiation formulas (NDFs), and this method is chosen since the problem has a stiff characteristic due to the high structural eigenfrequency, much higher than the common wave frequency. Table 1: Weight modes. Weight Mode Weight size WM1 16 x 400g WM2 16 x 600g WM3 16 x 800g Weight positions 0.10 Case 1: Usteady= 0.04 [m/s] Rn= 53 [-] 0.05 0.00 0.10 Case 2: Usteady= 0.13 [m/s] Rn= 172 [-] 0.05 0.00 Velocity [m/s] 0.2 Case 3: Usteady= 0.21 [m/s] Rn= 278 [-] 0.1 0.0 0.2 Case 4: Usteady= 0.26 [m/s] Rn= 344 [-] 0.1 0.0 Case 5: Usteady= 0.33 [m/s] Rn= 437 [-] 0.2 0.0 0.6 0.4 0.2 0.0 Case 6: Usteady= 0.52 [m/s] Rn= 688 [-] 0 40 80 120 Time [s] Fig. 8: The transient start-up phase of the six different velocity cases. The Reynolds numbers ( R n ) are calculated using the twine diameter (1.8 mm) as characteristic size. 3.2 Numerical model In the numerical model the vertical net cylinder was divided into 16 elements around the circumference, and 4 elements over its height. The measured current velocity (Fig. 8), and net elasticity (Fig. 9) were used as input to the numerical model. 80 Force [N] density of 1130 kg/m3. The netting is knotless with a mesh size of 32 mm and twine thickness of 1.8 mm. Mounted as square meshes, the solidity ratio ( S ) of the netting is 0.225. The net then forms an open vertical cylinder with diameter 1.435m and height 1.435m. Three sets of weights with nominal mass values of 400, 600 and 800 g are used in the tests. The weights are made of steel and have cylindrical shapes. Three different weight modes (WM) where tested (see Table 1) The hoop with net was positioned in the centre line of the tank, approximately 0.9 - 1.0 m below the surface. The hoop was held in place with four pair of lines to balance the forces from weights and hydrodynamic loads (see Fig. 7). The equilibrium position of hoop and net was achieved by minutely adjustments of the length and tension in each of the eight lines. Eight load cells using strain gauge technology were used to measure the strain in each line, and the global forces on the hoop were calculated from these measurements. Flow speed was measured with a Høntzsch Vane wheel A, which is commonly referred to as a “propeller log”. The principle of measurement is that a vane wheel rotates at a speed proportionally to the flow velocity. Because of its little weight, the vane wheel rotational speed adapts quickly to velocity increases. A transducer (Høntzsch U1a) transforms the signal from the vane wheel into a proportional analogue signal that is sent to the data acquisition system. Since the vane wheel is mounted in a nozzle, it measures what can be considered as the horizontal component of the actual flow speed. The model was subjected to six different current velocity cases ( U steady = 0.04, 0.13, 0.21, 0.26, 0.33, 0.52 [m/s] ). The whole transient start-up phase of the flow is measured (see Fig. 8), so that the exact same velocity development can be modelled in the numerical simulations. 60 Least squares curve fit Measured 40 20 0 0.00 0.05 0.10 Elongation [-] Fig. 9: Force - elongation characteristics in the net used in the physical model. The force - elongation tests were conducted on a 4 meshes wide and 68 meshes long segment. 3.3 Results and Discussion Measurements Simulations 10 3 Measurements Simulations 2 5 Usteady= 0.13 [m/s] 1 0 0 Usteady= 0.04 [m/s] 20 10 Usteady= 0.21 [m/s] 10 5 Usteady= 0.13 [m/s] 0 30 20 Usteady= 0.21 [m/s] 10 Drag force [N] Drag force [N] 0 40 Usteady= 0.26 [m/s] 20 0 80 0 60 40 Usteady= 0.26 [m/s] Usteady= 0.33 [m/s] 40 20 20 0 0 80 150 100 60 Usteady= 0.52 [m/s] Usteady= 0.33 [m/s] 40 50 20 0 0 0 0 40 80 120 Time [s] Fig. 10: Time series of drag force for weight mode 1 (16 x 400g). The combined results from the physical measurements and the numerical simulations are shown in Figs. 10 to 14. Time series of the drag force measured and simulated for different steady state velocities and weight configurations are shown in Figs. 10 to 12. The transient phase of the experiments are used for partial validation of the dynamic capabilities in the numerical model. In Fig. 13 the measured and simulated steady state drag force are shown as a function of velocity for the different weight configurations. The steady state phase is taken to be at t=100-140s, and the steady state drag force is the mean value of the drag force over this period. The error of steady state drag force from the simulations relative to the measurements are shown in Fig. 14. 40 80 Time [s] 120 Fig. 11: Time series of drag force for weight mode 2 (16 x 600g). The best agreement between measurements and simulations are for velocities in the range 0.2 - 0.4 m/s. The twine diameter in the net is 1.8mm. If the twine diameter is defined to be the characteristic dimension, the corresponding Reynolds number range is 260 - 530. In this range the relative error of the steady state drag force is +/- 0.2 (Fig. 14). For lower velocities the error increases, and the simulations under-predicts the drag. For higher velocities the simulations tends to over-predict the drag. The main reason for the under-prediction of drag for low velocities is due to the calculations of the lift and drag coefficients (Eq. 10 and 11) used in the simulations. As can be seen from the equations, the lift and drag coefficients are assumed to be independent of Reynolds number. The coefficients are derived from measurements of drag and lift of net meshes towed for Reynolds numbers in the Measurements Simulations Measurements Simulations 150 Drag force [N] (steady state phase: t=100-140s) 20 Usteady= 0.21 [m/s] 10 Drag force [N] 0 40 Usteady= 0.26 [m/s] 20 0 80 60 40 Usteady= 0.33 [m/s] 100 Weight mode 1 (16 x 0.4kg) 50 0 150 Weight mode 2 (16 x 0.6kg) 100 50 0 150 Weight mode 3 (16 x 0.8kg) 100 50 0 0.0 20 0.1 0 0 40 80 0.2 0.3 0.4 0.5 0.6 Velocity [m/s] 120 Time [s] Fig. 13: Drag force at steady state (t=100-140s) range l400 - 1800 (Rudi et al., 1988). The drag coefficient on a net structure is approximately independent of Reynolds number for R n > 500 (Fridman et al., 1986), but the drag increases with decreasing Reynolds numbers for R n < 500 . Therefor the drag coefficient found for Reynolds numbers in the range l400 - 1800 will under-predict the drag for Reynolds numbers below 500. The over-prediction of the drag force for higher flow velocities can be due to the shielding effect. The part of the net that is on the aft part of the net cylinder relative to the incoming current experiences a decrease in current velocity due to the shielding of the front side of the cylinder. As the current is assumed to be undisturbed by the structure, this effect is not taken into account in the model. The simulations will thus over-predict the drag force. Also note that the over-prediction is larger for weight mode 3 (16 x 800g). This is the weight mode with the largest weights, and will thus be the mode with less deformation. The over-prediction because of the shielding effect will be larger with less deformation of the net. The overprediction will be largest for a stiff structure, and will decrease for an increasing flexible structure as the exposed area decreases with increasing current. The same discrepancies as in the steady state phase are also present in the transient phase. For low velocities the numerical model under-predicts the drag force, while it tends to over-predict the drag force for higher velocities. Steady state drag force relative error [-] Fig. 12: Time series of drag force for weight mode 3 (16 x 800g). 0.2 0.0 -0.2 -0.4 Weight mode 1 (16 x 0.4kg) Weight mode 2 (16 x 0.6kg) Weight mode 3 (16 x 0.8kg) -0.6 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Velocity [m/s] Fig. 14: Steady state drag force relative error. The relative error is given by: R= ( D simulated – D measured ) ⁄ D measured , where D simulated and D measured are the steady state drag force from the simulations and measurements respectively. 4 FURTHER WORK The numerical model proposed here include potential for improvement. The authors will over the next three years continue to improve the numerical model. Further work will include the following aspects: • A more detailed validation will include comparison of the net structure deformation, and the numerical model will also be validated against experimental measure- • • • • 5 ments of net structures in waves. The hydrodynamics load model will be adjusted to include the Reynolds number dependency. Experiments on net panels in regular waves are currently under work, and will subsequently be used to refine the load model. Shielding effects with respects to current reduction and wave damping will be included. For a real fish cages the movement of the floating device to which the net is attached will to a great extent influence the tension in the net structure. The floater movement will thus be modelled and coupled with the net. A wave kinematics description based on Gerstner wave theory will be included. Multidirectional irregular waves will also be modelled with emphasis on correct free surface modelling. SUMMARY AND CONCLUSIONS A dynamic model of a 3D net structure is proposed. The model is partially validated against measurements of drag force on a cylindrical net structure in accelerating and steady current. The comparison between the drag force from experiments and simulations show that: • Best agreement between the simulations and the experimental results are found for velocities in the range 0.2 - 0.4 m/s. • The model under-predict the drag for velocities below this range, and tends to over-predict the drag for higher velocities. • The discrepancies can partly be explained by the Reynolds number independency of the hydrodynamic load model used in the simulations and neglection of shielding effects. • The results indicate that the steady state assumption is valid for the transient phase. 6 ACKNOWLEDGEMENT This work was funded by the Norwegian Research Council (NFR) through the research programs 3 Dimensional netpen movement and mooring of fishfarms, and Modelling and simulation of interaction between fluid and deformable net structures and aquacultural installations. 7 REFERENCES Aarsnes, J. V., Løland, G., and Rudi, H. (1990). “Current Forces on Cage, Nett Deflection.” Engineering for offshore fish farming, Glasgow, United Kingdom. Fridman, A. L., Carrothers, P. J. G., and FAO. (1986). Calculations for fishing gear designs, Published by arrangement with the Food and Agriculture Organization of the United Nations by Fishing News Books, Farnham. Lader, P., Fredheim, A. and Lien, E. (2001a). “Dynamic Behavior of 3D Nets Exposed to Waves and Current.” The 20th International Conference on Offshore Mechanics and Arctic Engineering, Rio de Janeiro, Brazil. Lader, P. and Fredheim, A. (2001b). “Modeling of Net Structures Exposed to 3D Waves and Current.” OPEN OCEAN AQUACULTURE IV, St. Andrews, Canada. Shampine, L. F., and Reichelt, M. W. (1997). “The MATLAB ODE Suite.” SIAM Journal on Scientific Computing, 18, 1-22. Rudi, H., Løland, G., and Furunes, I. (1988). “Experiments with nets; Forces on and flow trough net panels and cage systems.” MT 51 F88-0215, MARINTEK, Trondheim, Norway.