Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
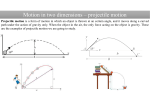
Lecture 4: Projectile motion with resistance 1 Homework Assignment for Bicycle Motion on a Hill Problem statement A bicyclist is moving on a hill with constant power. Obtain the speed as a function of time for both a 10% uphill grade (θ ≈ 5.7 degrees above the horizontal), and a 10% downhill grade. What is the analytic formula for the terminal speed, including the angle of the hill (positive angles uphill, negative angles downhill) in terms of the parameters of Equation 2.9? For your program’s calculations assume a constant power output P of 400 watts, an initial speed v 0 of 4 m/s, a mass m of 70 kg, a cross sectional area A of 0.33 m2 , density of air ρ 1.2 kg/meter3 , and a drag coefficient C = 1. Physics Review The physics principle is Newton’s Second Law: F = ma = dv/dt where F is the total force. Using the constant power P = FB v assumption for the force applied by the bicyclist and FD = −CρAv 2 /2 for the quadratic air resistance force, and −mg sin θ as the gravity force we obtain dv P CρA 2 = − v − g sin θ = f (t, x, v) dt mv 2m The function f (t, x, v) represents the time derivative function which in principle could be a function of t, the position x, and the speed v. In this problem the derivative is a function only of the speed v. The positive direction is defined as uphill. Notice that this differential equation works for the uphill or downhill cases as well if we take negative values of θ for the downhill and take positive positions and speeds in the downhill direction. In that case the gravity force goes in the same direction of the force applied by the bicyclist while the air resistance continues to oppose the motion. We can also write the time derivative of the position as dx = v = g(t, x, v) dt The derivative function g is simply v. We can view dv/dt and dx/dt as two coupled equations. Differential Equation Solving Algorithm Review The Euler method is a step-by-step iteration which uses the derivative function f (v) only once at the beginning of the time step vi+1 = vi + f (vi )∆t The four point Runge-Kutta method (page 459) uses the derivative function four times: once at the beginning of the step, twice at the mid-point of the step, and once at the end of the step, 1 vi+1 = vi + [f (vi ) + 2f (vi0 ) + 2f (vi00 ) + f (vi000 )] ∆t 6 Since in this problem the derivative function f doesn’t depend upon the independent variable t, I omit showing any t dependence. The text page 459 shows you how to calculate first v 0 , second vi00 , and last vi000 in a sequential fashion. 2 Lecture 4: Projectile motion with resistance Homework Assignment for Bicycle Motion on a Hill First Solution at 5.7o Drag = 1, V0 = 4 m/s, Time Step = 0.1 s, Angle = -5.7 deg xPosition (m) xPosition (m) Drag = 1, V0 = 4 m/s, Time Step = 0.1 s, Angle = 5.7 deg 1000 4000 3500 3000 800 2500 600 2000 1500 400 1000 200 500 0 0 20 40 60 80 100 120 140 160 180 0 0 200 Seconds Speed (m/s) Speed (m/s) 9 8 7 40 60 80 100 120 140 160 180 200 Seconds Drag = 1, V0 = 4 m/s, Time Step = 0.1 s, Angle = -5.7 deg Drag = 1, V0 = 4 m/s, Time Step = 0.1 s, Angle = 5.7 deg 10 20 30 25 20 6 15 5 4 10 3 2 5 1 0 0 20 40 60 80 100 120 140 160 180 200 Time (seconds) 0 0 20 40 60 80 100 120 140 160 180 200 Time (seconds) Figure 1: Left side: Position (top) and speed of a bicycle going up a 5.7 degree hill with an initial speed of 4.0 m/s. The speed increases in about 15 seconds to its terminal value of 5.41 m/s. Right side: The same for a bicycle going down a 5.7 degree hill with an initial speed of 4.0 m/s. The speed increases for about 40 seconds to its terminal value of 20.98 m/s which is about 47 miles/hour. The solutions to the bicycle on a hill motion problem are shown in the figures above. There is a big difference in the two cases. Going up hill the speed increases only a small amount from its initial value, while going down hill the speed becomes quite large. The difference in terminal speeds is almost a factor of four, and similarly for the distances traveled in 200 seconds since most of the distance is traveled at the constant terminal speed. Equation for the Terminal Speed For the horizontal motion case of air resistance, the terminal speed equation was a simple cuberoot evaluation. For the bicycle on a hill motion, there is a cubic equation to be solved: P CρA 2 − v − g sin θ = 0 =⇒ CρAvT3 + 2mg sin θvT − 2P = 0 mvT 2m T You solve this cubic roots equation to find the terminal speed vT . Lecture 4: Projectile motion with resistance 3 Homework Assignment for Bicycle Motion on a Hill Equation for the Terminal Speed P CρA 2 − vT − g sin θ = 0 =⇒ CρAvT3 + 2mg sin θvT − 2P = 0 mvT 2m There are in general 3 roots for a cubic equation, and some of these could be imaginary. It’s a simple matter to use Mathematica to get the algebraic and numerical solutions for this equation. You will find that there is only one real root for the uphill case here, but three real roots for the downhill case. However, two of the downhill roots have a negative sign, which is not physically meaningful. So only the positive root in the downhill case is the correct one. You can verify that the terminal speeds as found by Mathematica agree with the values shown on the figures here. Downhill angle for 70 miles/hour terminal speed To get the downhill angle which will produce a terminal speed of 70 mph first convert this speed to m/s as 31.3 m/s. Then solve the equation CρAvT3 +2mg sin θvT −2P = 0 = (1.2)(0.33)(31.3)3 +2(70)(9.8)(31.3) sin θ−2(400) =⇒ θ = −15.3o First in class assignment Modify your program to do problem 2.4 for the case of zero initial speed. You should not have to add or change too many lines in a well-designed program. When you complete this assignment you will have a program which is more physically realistic, but for which the final results are not very different from what we have already seen You can look at this problem as having two differential equations for dv/dt in two different speed ranges. For speeds less than a transition speed designated as vtransition , a constant force F0 is applied by the rider. This provides the acceleration as dv F0 CρA 2 = − v − g sin θ (v <= vtransition ) dt m 2m At speeds v > vtransition , we have the same acceleration as before with constant power P P CρA 2 dv = − v − g sin θ (v > vtransition ) dt mv 2m By construction the two equations are made equal at the transition speed which establishes the value of F0 = P/vtransition . The book suggests a transition speed of 7 m/s. Second in class assignment Modify the program some more to add a resistance which is linearly dependent on the speed, as given by Equation 2.11 for problem 2.3. You should be able to confirm that the linear air resistance, or viscosity term for air, is completely negligible for the bicycle motion solution. 4 Lecture 4: Projectile motion with resistance Second Example of Bicycle Motion on a Hill Second Solution at 11.5o If the hill angles are doubled from 5.7o to 11.5o we get the solutions shown below xPosition (m) Drag = 1, V0 = 4 m/s, Time Step = 1 s, Angle = -11.5 deg xPosition (m) Drag = 1, V0 = 4 m/s, Time Step = 1 s, Angle = 11.5 deg 5000 600 4000 500 400 3000 300 2000 200 1000 100 0 0 0 0 20 40 60 80 100 120 140 160 180 20 40 60 80 100 120 140 160 200 Seconds 180 200 Seconds Speed (m/s) 6 5 Speed (m/s) Drag = 1, V0 = 4 m/s, Time Step = 1 s, Angle = -11.5 deg Drag = 1, V0 = 4 m/s, Time Step = 1 s, Angle = 11.5 deg 40 35 30 25 4 20 3 15 2 10 1 0 0 5 20 40 60 80 100 120 140 160 180 200 Time (seconds) 0 0 20 40 60 80 100 120 140 160 180 200 Time (seconds) Figure 2: Left side: Position (top) and speed of a bicycle going up a 5.7 degree hill with an initial speed of 4.0 m/s. The speed rapidly decreases in less than 10 seconds to its terminal value of 2.9 m/s. Right side: The same for a bicycle going down a 5.7 degree hill with an initial speed of 4.0 m/s. The speed increases for about 40 seconds to its terminal value of 26.7 m/s which is about 62 miles/hour. Going down a hill with twice the slope has the bike reaching a 20% larger terminal speed. However, going up the hill, the bike decelerates from its initial 4 m/s speed to reach a terminal speed of only 2.9 m/s. 5 Lecture 4: Projectile motion with resistance Gravity Free Fall With Quadratic Air Resistance Analytic Solution of Gravity Free Fall with Quadratic Air Resistance Imagine the down hill angle being 90o , the power term P going to zero, and the initial speed also being 0. Then you have the case of free fall in a gravitational field with quadratic air resistance. dv CρA 2 =− v + g = f (t, y, v) dt 2m dy = v = g(t, y, v) dt In the above equations I changed the position variable to be the usual y for the vertical instead of x, with y and v considered to be positive in the downward direction. You can see that there is a simple quadratic solution for the terminal speed in this free fall CρA 2 v + g = 0 =⇒ vTfree fall = − 2m s 2mg CρA Moreover, there is an analytic solution for v(t) in free fall. Integrate the differential equation for dv/dt after separating out the variables and expressing the constants in terms v T Z t Z v vT2 dv 0 v2 dv = g(1 − 2 ) =⇒ dt0 = dt vT g(vT2 − v 0 2 ) 0 0 t = τ tanh −1 µ v vT ¶ =⇒ v(t) = vT tanh t τ µ ¶ where τ = vT /g is called the characteristic time for the free fall. The speed becomes very near the terminal speed reached after a few units of characteristic time, e.g. v(t = 5τ ) = 0.99991v T . Third in class assignment Confirm that your solution to problem 2.4 in the case of 90o downhill angle with no applied power and zero initial speed does give the correct terminal speed for free fall in a gravity field. Compare your numerical v(t) result in this case to the analytic result above by plotting the ratio of the numerical result to the analytic solution for v(t) over a time period of 200 seconds, not including the starting point when the speed is 0. Is there an analytic solution for the position function y(t) in gravity free fall with quadratic air resistance? If so, plot the ratio of the numerical to the analytic solutions for y(t) over a time period of 200 seconds, again not including the starting point which is assumed to be 0. 6 Lecture 4: Projectile motion with resistance Air Resistance in Two Dimensional Motion Review of Projectile Equations Without Air Resistance In first year physics you studied the two dimensional motion of a projectile without air resistance, and with gravity acting in the negative vertical y direction The acceleration equations in the x and the y directions are d2 x d2 y = 0 = −g dt2 dt2 The projectile is assumed to be fired at an angle above the horizontal θ0 with an initial speed of v0 . The origin of the coordinate system is usually taken to be the initial position of the projectile. In this example up is the positive y direction. Under these conditions the projectile equations of motion are obtained as dx = vx (t) = v0 cos θ0 dt dy = vy (t) = v0 sin θ0 − gt dt 1 y(t) = v0 sin θ0 t − gt2 2 In particular when there is no air resistance then the speed in the horizontal direction is constant at the initial vx value of v0 cos θ0 . The time parameter can be eliminated between the x(t) and y(t) position equations in order to produce the symmetric, parabolic trajectory equation y(x) x(t) = v0 cos θ0 t y(x) = tan θ0 x − 2v02 g x2 cos2 θ0 The range R of the projectile is the horizontal distance x traveled by the projectile when it returns to its original y = 0 height. The R equation is easily obtained from the trajectory equation as v2 R = 0 sin 2θ0 g The range equation implies that the maximum range occurs for θ0 = 45o , and that for other angles the range values are symmetric about the 45o angle. When air resistance is added all three of these features (constant horizontal speed, parabolic trajectory, and simple range equation) are changed in a substantial manner. Terminology for Projectile Quadratic Air Resistance When an air resistance proportional to the square of the speed is included, then both the x and the y acceleration equations are affected. The textbook authors chose to change their terminology for the quadratic air resistance force in projectile motion. This resistance force is represented as the general Fdrag = −B2 v 2 instead of the specific Fdrag = −CρAv 2 . However, the drag resistance will still depend upon the air density as we will see in the next lecture. Lecture 4: Projectile motion with resistance 7 Air Resistance for Two Dimensional Motion Cartesian Components of the Drag Resistance The drag resistance force is exactly opposite in direction to the velocity vector direction. Hence, the drag force will change in both magnitude and direction as the velocity vector changes. vx Fdrag,x = −B2 v 2 cos θ = −B2 v 2 = −B2 vvx v v y Fdrag,y = −B2 v 2 sin θ = −B2 v 2 = −B2 vvy v There is a subtle physics point about the drag force in the y direction. The vy will begin as positive but will change sign to negative after the projectile has reached its maximum height. This change in sign causes the vertical drag force to also change in sign. This sign change is correct physically. When the projectile is rising the vertical component of the drag force is directed downward (negative) in the same direction as the gravity force, but the vertical component of the drag force changes sign to be positive and opposite gravity when the projectile is falling. The vx component is always positive so that the drag force in the horizontal direction is always pointing in the negative x direction. Differential Equations for Projectile Acceleration Modified for Resistance The differential equations for projectile acceleration modified for quadratic air resistance are dx = vx = f (t, x, vx , y, vy ) dt µ ¶ dvx B2 =− vvx = g(t, x, vx , y, vy ) dt m dy = vy = h(t, x, vx , y, vy ) dt ¶ µ dvy B2 vvy = j(t, x, vx , y, vy ) = −g − dt m Instead of having two second order differential equations we decide to solve four first order differential equations. We can think of x, vx , y, vy as four different dependent variables and t as the common independent variable. The four derivative functions f, g, h, j are in principle depending on these five variables, although the f and the h function are actually dependent only on one variable each. None of the four derivative functions depends explicitly on t in this problem nor on the positions. Chapter 4 problems will have position dependent accelerations. These four differential equations are intrinsically coupled. You cannot solve one equation first completely, as we did for the sequentialqradioactive decay problem in Chapter 1. The coupling shows up most evidently in the v = vx2 + vy2 term which is in both the dvx /dt and dvy /dt differential equations. There is no choice but to solve these coupled equations iteratively, either by the Euler method (Equations 2.20 on page 27) or by the four point Runge-Kutta method. You can also see that the physically controlling parameter for projectile air resistance is the ratio B2 /m. For the projectile shell problems in the book this parameter is taken to be B2 /m = 4 × 10−5 m−1 . 8 Lecture 4: Projectile motion with resistance Projectile Motion with Quadratic Air Resistance Projectile Trajectories Without and With Air Resistance The trajectories of projectiles as calculated without and with air resistance are shown in the figures below for three different initial elevation angles. In each case an initial speed of v0 = 700 m/s was assumed. For the air resistance drag parameter a B2 /m = 4 × 10−5 m−1 was taken as previously noted. For the no resistance case you can see that the 45o elevation angle yPosition (km) 20 18 16 14 yPosition (km) RK4: Drag=4e-05, V0=700 m/s, Time Step=0.5 s RK4: No Drag, V0=700 m/s, Time Step=0.5 s 20 18 16 14 12 12 10 10 8 8 6 6 4 4 2 2 0 0 10 20 30 40 50 xPosition (km) 0 0 2 4 6 8 10 12 14 16 18 20 22 24 xPosition (km) Figure 3: Left side: projectile motion with no air resistance. Three elevation angles θ 0 are shown: 35o (blue), 45o (red), and 55o (green). The longest range (50 km) is for θ0 = 45o , while the other two trajectories at ±10o about 45o show the same (smaller) range as expected. Right side: the same calculations but including air resistance. The horizontal scale has been made smaller but the vertical scale is the same as on the left. The ranges are much shorter, and the θ0 = 45o case does not have the longest range. The trajectories are no longer simple parabolas. allows for the longest range. The ranges for the elevation angles of 35o and 55o are the same, although their two trajectories are not the same. Each of the trajectories with no air resistance is a parabola symmetric about the mid-point of its range. For the quadratic air resistance case, the ranges are dramatically smaller. You can see that these maximum heights are smaller than in the no resistance cases and the trajectories are no longer symmetric parabolas. Repeated checks show that the longest trajectory (22.07 km) for v0 = 770 m/s occurs at θ0 ≈ 39o . Extracting the range, and checking for stability There is no analytic formula for the range of a projectile in the case of quadratic air resistance. Instead, one has to interpolate as in Equation 2.21 (page 28) for the range based on when the y(t) changes sign from positive to negative. As for checking the calculations, one should first make sure that the no drag case gives the expected results. Next, for the drag case one should check that changes in the time step do not give significant changes in the results, for example the range or maximum height numbers do not change appreciably.