Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Weierstrass Institute for
Applied Analysis and Stochastics
Asymptotics beats Monte Carlo: The case of
correlated local vol baskets
Christian Bayer and Peter Laurence
WIAS Berlin and Università di Roma
Approximations for local vol baskets · November 29, 2014 · Page 1 (30)
Mohrenstrasse 39 · 10117 Berlin · Germany · Tel. +49 30 20372 0 · www.wias-berlin.de
Outline
1
Introduction
2
Outline of our approach
3
Heat kernel expansions
4
Numerical examples
Approximations for local vol baskets · November 29, 2014 · Page 2 (30)
Outline
1
Introduction
2
Outline of our approach
3
Heat kernel expansions
4
Numerical examples
Approximations for local vol baskets · November 29, 2014 · Page 3 (30)
Methods of European option pricing
u(t, S t ) = e−r(T −t) E f (S T ) | S t
Example (Example treated in this work)
P
+
− K , at least one weight positive
I
f (S) =
I
n large (e.g., n = 500 for SPX)
I
PDE methods
I
(Quasi) Monte Carlo method
I
Fourier transform based methods
I
Approximation formulas
n
i=1 wi S i
Approximations for local vol baskets · November 29, 2014 · Page 4 (30)
Methods of European option pricing
u(t, S t ) = e−r(T −t) E f (S T ) | S t
Example (Example treated in this work)
P
+
− K , at least one weight positive
I
f (S) =
I
n large (e.g., n = 500 for SPX)
I
PDE methods
Pros: fast, general
Cons: curse of dimensionality, path-dependence may or
may not be easy to include
I
(Quasi) Monte Carlo method
I
Fourier transform based methods
I
Approximation formulas
n
i=1 wi S i
Approximations for local vol baskets · November 29, 2014 · Page 4 (30)
Methods of European option pricing
u(t, S t ) = e−r(T −t) E f (S T ) | S t
Example (Example treated in this work)
P
+
− K , at least one weight positive
I
f (S) =
I
n large (e.g., n = 500 for SPX)
I
PDE methods
I
(Quasi) Monte Carlo method
Pros: very general, easy to adapt, no curse of
dimensionality
Cons: slow, quasi MC may be difficult in high dimensions
I
Fourier transform based methods
I
Approximation formulas
n
i=1 wi S i
Approximations for local vol baskets · November 29, 2014 · Page 4 (30)
Methods of European option pricing
u(t, S t ) = e−r(T −t) E f (S T ) | S t
Example (Example treated in this work)
P
+
− K , at least one weight positive
I
f (S) =
I
n large (e.g., n = 500 for SPX)
I
PDE methods
I
(Quasi) Monte Carlo method
I
Fourier transform based methods
Pros: very fast to evaluate (“explicit formula”)
Cons: only available for affine models, difficult to
generalize, curse of dimensionality
I
Approximation formulas
n
i=1 wi S i
Approximations for local vol baskets · November 29, 2014 · Page 4 (30)
Methods of European option pricing
u(t, S t ) = e−r(T −t) E f (S T ) | S t
Example (Example treated in this work)
P
+
− K , at least one weight positive
I
f (S) =
I
n large (e.g., n = 500 for SPX)
I
PDE methods
I
(Quasi) Monte Carlo method
I
Fourier transform based methods
I
Approximation formulas
Pros: very fast evaluation
Cons: derived on case by case basis, therefore very
restrictive
n
i=1 wi S i
Approximations for local vol baskets · November 29, 2014 · Page 4 (30)
Methods of European option pricing
u(t, S t ) = e−r(T −t) E f (S T ) | S t
Example (Example treated in this work)
P
+
− K , at least one weight positive
I
f (S) =
I
n large (e.g., n = 500 for SPX)
I
PDE methods
(Quasi) Monte Carlo method
Fourier transform based methods
Approximation formulas
Work horse methods: PDE methods and (in particular) (Q)MC
Particular models allowing approximation formulas (e.g., SABR
formula) or FFT (Heston model) very popular
I
I
I
I
I
n
i=1 wi S i
Approximations for local vol baskets · November 29, 2014 · Page 4 (30)
Outline
1
Introduction
2
Outline of our approach
3
Heat kernel expansions
4
Numerical examples
Approximations for local vol baskets · November 29, 2014 · Page 5 (30)
Setting
I
Local volatility model for forward prices
dFi (t) = σi (Fi (t))dWi (t), i = 1, . . . , n,
D
E
dWi (t) , dW j (t) = ρi j dt
P
n
+
− K , at least
I
Generalized spread option with payoff
one wi positive
I
Goal: fast and accurate approximation formulas, even for high n
I
n = 100 or n = 500 not uncommon (index options)
i=1 wi F i
Example
I
Black-Scholes model: σi (Fi ) = σi Fi
I
CEV model: σi (Fi ) = σi Fi i
β
Approximations for local vol baskets · November 29, 2014 · Page 6 (30)
Setting
I
Local volatility model for forward prices
dFi (t) = σi (Fi (t))dWi (t), i = 1, . . . , n,
D
E
dWi (t) , dW j (t) = ρi j dt
P
n
+
− K , at least
I
Generalized spread option with payoff
one wi positive
I
Goal: fast and accurate approximation formulas, even for high n
I
n = 100 or n = 500 not uncommon (index options)
i=1 wi F i
Example
I
Black-Scholes model: σi (Fi ) = σi Fi
I
CEV model: σi (Fi ) = σi Fi i
β
Approximations for local vol baskets · November 29, 2014 · Page 6 (30)
Setting
I
Local volatility model for forward prices
dFi (t) = σi (Fi (t))dWi (t), i = 1, . . . , n,
D
E
dWi (t) , dW j (t) = ρi j dt
P
n
+
− K , at least
I
Generalized spread option with payoff
one wi positive
I
Goal: fast and accurate approximation formulas, even for high n
I
n = 100 or n = 500 not uncommon (index options)
i=1 wi F i
Example
I
Black-Scholes model: σi (Fi ) = σi Fi
I
CEV model: σi (Fi ) = σi Fi i
β
Approximations for local vol baskets · November 29, 2014 · Page 6 (30)
Basket Carr-Jarrow formula
I
Consider the basket (index)
d
n
X
i=1
Pn
wi Fi (t) =
i=1 wi F i :
n
X
wi σi (Fi (t))dWi (t)
i=1
I
Ito’s formula formally implies that
I
Let Hn−1 be the Hausdorff measure on E(K)
Approximations for local vol baskets · November 29, 2014 · Page 7 (30)
Basket Carr-Jarrow formula
Pn
I
Consider the basket (index)
I
Ito’s formula formally implies that
i=1 wi F i .
+
+ n
n
X
X
wi Fi (t) − K = wi Fi (0) − K +
i=1
i=1
+
n
X
i=1
I
T
Z
1P
wi
0
1
wi Fi (u)>K dF i (u) +
2
T
Z
0
δP wi Fi (u)=K σ2N,B (F(u))du
Let Hn−1 be the Hausdorff measure on E(K)
Approximations for local vol baskets · November 29, 2014 · Page 7 (30)
Basket Carr-Jarrow formula
Pn
I
Consider the basket (index)
I
Ito’s formula formally implies with E(K) = {F|
i=1 wi F i .
P
wi Fi = K} that
+
n
i
X
1 Z T h 2
E σN,B (F(u))δE(K) (F(u)) du
C(F(0), K, T ) = wi Fi (0) − K +
2 0
i=1
I
Let Hn−1 be the Hausdorff measure on E(K)
Approximations for local vol baskets · November 29, 2014 · Page 7 (30)
Basket Carr-Jarrow formula
Pn
I
Consider the basket (index)
I
Ito’s formula formally implies with E(K) = {F|
i=1 wi F i .
P
wi Fi = K} that
+
n
X
C(F(0), K, T ) = wi Fi (0) − K
i=1
1
+
2
I
T
Z
0
Z
Rn
σ2N,B (F)δE(K) (F)p(F0 , F, u)dFdu
Let Hn−1 be the Hausdorff measure on E(K)
Approximations for local vol baskets · November 29, 2014 · Page 7 (30)
Basket Carr-Jarrow formula
Pn
I
Consider the basket (index)
I
Ito’s formula formally implies with E(K) = {F|
P
v(F) B i wi Fi that
i=1 wi F i .
P
wi Fi = K} and
+
n
X
C(F(0), K, T ) = wi Fi (0) − K
i=1
+
I
1
2 |w|
Z
0
T
Z
Rn
|∇v(F)| σ2N,B (F)δ0 (v(F) − K)p(F0 , F, u)dFdu
Let Hn−1 be the Hausdorff measure on E(K)
Approximations for local vol baskets · November 29, 2014 · Page 7 (30)
Basket Carr-Jarrow formula
Pn
I
Consider the basket (index)
i=1 wi F i .
I
Ito’s formula formally implies with E(K) = {F|
P
v(F) B i wi Fi that
P
wi Fi = K} and
+
n
X
C(F(0), K, T ) = wi Fi (0) − K
i=1
+
I
1
2 |w|
Z
0
T
Z
Rn
|∇v(F)| σ2N,B (F)δ0 (v(F) − K)p(F0 , F, u)dFdu
Let Hn−1 be the Hausdorff measure on E(K). Recall the co-area
formula:
Z
Ω
|∇v(x)|g(x)dx =
Z
∞
−∞
Z
v−1 ({s})
g(x)Hn−1 (dx)ds
Approximations for local vol baskets · November 29, 2014 · Page 7 (30)
Basket Carr-Jarrow formula
I
I
Consider the basket (index) ni=1 wi Fi .
P
Ito’s formula formally implies with E(K) = {F| wi Fi = K} that
P
+
n
X
C(F(0), K, T ) = wi Fi (0) − K
i=1
+
I
1
2 |w|
T
Z
0
Z
Rn
|∇v(F)| σ2N,B (F)δ0 (v(F) − K)p(F0 , F, u)dFdu
Let Hn−1 be the Hausdorff measure on E(K) , then we have the
Carr-Jarrow formula
n
+
X
CB (F0 , K, T ) = wi Fi (0) − K +
i=1
1
+
2|w|
Z
0
T
Z
∞
δ0 (s − K)
−∞
Z
Es
σ2N,B (F)p(F0 , F, t)Hn−1 (dF)dsdt
Approximations for local vol baskets · November 29, 2014 · Page 7 (30)
Basket Carr-Jarrow formula
I
I
Consider the basket (index) ni=1 wi Fi .
P
Ito’s formula formally implies with E(K) = {F| wi Fi = K} that
P
+
n
X
C(F(0), K, T ) = wi Fi (0) − K
i=1
+
I
1
2 |w|
Z
0
T
Z
Rn
|∇v(F)| σ2N,B (F)δ0 (v(F) − K)p(F0 , F, u)dFdu
Let Hn−1 be the Hausdorff measure on E(K) , then we have the
Carr-Jarrow formula
n
+
X
C(F0 , K, T ) = wi Fi (0) − K +
1
+
2
T
Z
0
1
|w|
Z
i=1
n
X
wi w j σi (Fi )σ j (F j )ρi j p(F0 , F, u)Hn−1 (dF)du.
E(K) i, j=1
Approximations for local vol baskets · November 29, 2014 · Page 7 (30)
Approximations
I
Heat kernel expansion (to be discussed in detail later):
1
d(F0 , F)2
≈
exp
−
− C(F0 , F)
2t
(2πt)n/2
P
By change of variables Fn = w1n K − n−1
i=1 wi F i on EK :
!
σ2N,B (F)p(F0 , F, t)
I
|w|
dF1 · · · dFn−1
|wn |
Laplace approximation: with F∗ = argminF∈EK d(F0 , F) and
P
GK = {(F1 , . . . , Fn−1 )| n−1
i=1 wi F i < K}
Z
Z
d(F ,F)2
d(F ,F∗ )2
zT Qz
− 02t −C(F0 ,F)
− 02t
−C(F0 ,F∗ )
e
dF1 · · · dFn−1 ≈ e
e− 2t dz
Hn−1 (dF) =
I
Rn−1
GK
=t
n−1
2
e
−
d(F0 ,F∗ )2
−C(F0 ,F∗ )
2t
We rely on the principle of not feeling the boundary.
Approximations for local vol baskets · November 29, 2014 · Page 8 (30)
n−1
(2π) 2
√
det Q
Approximations
I
Heat kernel expansion (to be discussed in detail later):
1
d(F0 , F)2
≈
exp
−
− C(F0 , F)
2t
(2πt)n/2
P
By change of variables Fn = w1n K − n−1
i=1 wi F i on EK :
!
σ2N,B (F)p(F0 , F, t)
I
|w|
dF1 · · · dFn−1
|wn |
Laplace approximation: with F∗ = argminF∈EK d(F0 , F) and
P
GK = {(F1 , . . . , Fn−1 )| n−1
i=1 wi F i < K}
Z
Z
d(F ,F)2
d(F ,F∗ )2
zT Qz
− 02t −C(F0 ,F)
− 02t
−C(F0 ,F∗ )
e
dF1 · · · dFn−1 ≈ e
e− 2t dz
Hn−1 (dF) =
I
Rn−1
GK
=t
n−1
2
e
−
d(F0 ,F∗ )2
−C(F0 ,F∗ )
2t
We rely on the principle of not feeling the boundary.
Approximations for local vol baskets · November 29, 2014 · Page 8 (30)
n−1
(2π) 2
√
det Q
Approximations
I
Heat kernel expansion (to be discussed in detail later):
1
d(F0 , F)2
≈
exp
−
− C(F0 , F)
2t
(2πt)n/2
P
By change of variables Fn = w1n K − n−1
i=1 wi F i on EK :
!
σ2N,B (F)p(F0 , F, t)
I
|w|
dF1 · · · dFn−1
|wn |
Laplace approximation: with F∗ = argminF∈EK d(F0 , F) and
P
GK = {(F1 , . . . , Fn−1 )| n−1
i=1 wi F i < K}
Z
Z
d(F ,F)2
d(F ,F∗ )2
zT Qz
− 02t −C(F0 ,F)
− 02t
−C(F0 ,F∗ )
e
dF1 · · · dFn−1 ≈ e
e− 2t dz
Hn−1 (dF) =
I
Rn−1
GK
=t
n−1
2
e
−
d(F0 ,F∗ )2
−C(F0 ,F∗ )
2t
We rely on the principle of not feeling the boundary.
Approximations for local vol baskets · November 29, 2014 · Page 8 (30)
n−1
(2π) 2
√
det Q
Non-degeneracy of the optimization problem
I
Assume non-degeneracy of F∗ = argminF∈EK d(F0 , F)
I
Generically true, but exceptional points F0 or K often exist.
I
Approximations for local vol baskets · November 29, 2014 · Page 9 (30)
Non-degeneracy of the optimization problem
I
Assume non-degeneracy of F∗ = argminF∈EK d(F0 , F)
I
Generically true, but exceptional points F0 or K often exist.
I
Example: F1 , F2 independent, Black-Scholes assets, σi = 1,
F0,i = 1, f . . . density of F1,T + F2,T . Then
Λ(K)
1
exp − T √T (c0 + O (T )) , K , 2e,
f (K) =
∗)
1
exp − Λ(K
(c0 + O (T )) , K = 2e.
T
T 3/4
Approximations for local vol baskets · November 29, 2014 · Page 9 (30)
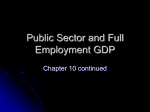
Non-degeneracy of the optimization problem
I
I
−1
0
1
2
I
Assume non-degeneracy of F∗ = argminF∈EK d(F0 , F)
Generically true, but exceptional points F0 or K often exist.
Related concept of focality in Riemannian geometry.
−2
F
Focal points
Opt. config.
−2
−1
0
1
Approximations for local vol baskets · November 29, 2014 · Page 9 (30)
2
Matching to implied volatilities
Theorem
+
n
X
CB (F0 , K, T ) = wi Fi (0) − K +
i=1
1
+ √
e−C(F0 ,F
√
∗
2
2 2π |wn | d(F0 , F ) det Q
I
∗
∗ )− d(F0 ,F )
2T
Bachelier implied vol (with F 0 =
Pn
σB ∼ σB,0 + T σB,1 with σB,0
I
T 3/2 +o(T 3/2 ), as T → 0.
i=1 wi F 0,i ):
F 0 − K , σB,1 = · · ·
=
d(F0 , F∗ ) F 0 Black-Scholes implied vol:
σBS ∼ σBS ,0 + T σBS ,1 with σBS ,0 =
log F 0 /K d(F0 , F∗ )
Approximations for local vol baskets · November 29, 2014 · Page 10 (30)
, σBS ,1 = · · ·
Matching to implied volatilities
Theorem
+
n
X
CB (F0 , K, T ) = wi Fi (0) − K +
i=1
1
+ √
e−C(F0 ,F
√
∗
2
2 2π |wn | d(F0 , F ) det Q
I
∗
∗ )− d(F0 ,F )
2T
Bachelier implied vol (with F 0 =
Pn
σB ∼ σB,0 + T σB,1 with σB,0
I
T 3/2 +o(T 3/2 ), as T → 0.
i=1 wi F 0,i ):
F 0 − K , σB,1 = · · ·
=
d(F0 , F∗ ) F 0 Black-Scholes implied vol:
σBS ∼ σBS ,0 + T σBS ,1 with σBS ,0 =
log F 0 /K d(F0 , F∗ )
Approximations for local vol baskets · November 29, 2014 · Page 10 (30)
, σBS ,1 = · · ·
Matching to implied volatilities
Theorem
+
n
X
CB (F0 , K, T ) = wi Fi (0) − K +
i=1
1
+ √
e−C(F0 ,F
√
∗
2
2 2π |wn | d(F0 , F ) det Q
I
∗
∗ )− d(F0 ,F )
2T
Bachelier implied vol (with F 0 =
Pn
σB ∼ σB,0 + T σB,1 with σB,0
I
T 3/2 +o(T 3/2 ), as T → 0.
i=1 wi F 0,i ):
F 0 − K , σB,1 = · · ·
=
d(F0 , F∗ ) F 0 Black-Scholes implied vol:
σBS ∼ σBS ,0 + T σBS ,1 with σBS ,0 =
log F 0 /K d(F0 , F∗ )
Approximations for local vol baskets · November 29, 2014 · Page 10 (30)
, σBS ,1 = · · ·
The ATM case
I
Above formulas have singularities when F 0 = K (ATM)
I
Resolve by l’Hopital formula or first order heat kernel expansion.
I
We have F∗ = F0 and
det Q =
σ2N,B (F0 ) det ρ−1
n
Y
σk (F0,k )−2 /w2n .
k=1
I
Higher order Laplace exansion required.
I
σBS ,0 = σBach,0 =
I
σBS ,1
σN,B (F0 )
F0
√
σ3BS ,0
σ3BS ,0
2π ū0
ū1
g1 + g0 +
=
= σBach,1 +
3K
24
24
Approximations for local vol baskets · November 29, 2014 · Page 11 (30)
The ATM case
I
Above formulas have singularities when F 0 = K (ATM)
I
Resolve by l’Hopital formula or first order heat kernel expansion.
I
We have F∗ = F0 and
det Q =
σ2N,B (F0 ) det ρ−1
n
Y
σk (F0,k )−2 /w2n .
k=1
I
Higher order Laplace exansion required.
I
σBS ,0 = σBach,0 =
I
σBS ,1
σN,B (F0 )
F0
√
σ3BS ,0
σ3BS ,0
2π ū0
ū1
g1 + g0 +
=
= σBach,1 +
3K
24
24
Approximations for local vol baskets · November 29, 2014 · Page 11 (30)
The ATM case
I
Above formulas have singularities when F 0 = K (ATM)
I
Resolve by l’Hopital formula or first order heat kernel expansion.
I
We have F∗ = F0 and
det Q =
σ2N,B (F0 ) det ρ−1
n
Y
σk (F0,k )−2 /w2n .
k=1
I
Higher order Laplace exansion required.
I
σBS ,0 = σBach,0 =
I
σBS ,1
σN,B (F0 )
F0
√
σ3BS ,0
σ3BS ,0
2π ū0
ū1
g1 + g0 +
=
= σBach,1 +
3K
24
24
Approximations for local vol baskets · November 29, 2014 · Page 11 (30)
Greeks
I
Goal: sensitivity w. r. t. model parameter κ of the option price
CB (F0 , K, T ) ≈ C BS (F 0 , K, σBS , T )
I
Sensitivity: ∂κ C BS (F 0 , K, σBS , T ) +
|{z}
νBS (F 0 , K, σBS , T )∂κ σBS
|{z}
BS greek
BS vega
I
Recall that σBS ,0 , σBS ,1 explicit up to F∗
I
By the minimizing property: ∂Fi d2 (F0 , FK (G))G=G∗ = 0
I
Differentiating with respect to κ gives
n−1
X
∂κ ∂Fi d2 (F0 , FK (G))G∗ +
∂Fl ∂Fi d2 (F0 , FK (G))G∗ ∂κ Fl∗ = 0
l=1
Up to the above system of linear equations for ∂κ F∗ , there are explicit
expression for the sensitivities of the approximate option prices.
Approximations for local vol baskets · November 29, 2014 · Page 12 (30)
Greeks
I
Goal: sensitivity w. r. t. model parameter κ of the option price
CB (F0 , K, T ) ≈ C BS (F 0 , K, σBS , T )
I
Sensitivity: ∂κ C BS (F 0 , K, σBS , T ) + νBS (F 0 , K, σBS , T )∂κ σBS
I
Recall that σBS ,0 , σBS ,1 explicit up to F∗
I
By the minimizing property: ∂Fi d2 (F0 , FK (G))G=G∗ = 0
I
Differentiating with respect to κ gives
n−1
X
∂κ ∂Fi d2 (F0 , FK (G))G∗ +
∂Fl ∂Fi d2 (F0 , FK (G))G∗ ∂κ Fl∗ = 0
l=1
Up to the above system of linear equations for ∂κ F∗ , there are explicit
expression for the sensitivities of the approximate option prices.
Approximations for local vol baskets · November 29, 2014 · Page 12 (30)
Outline
1
Introduction
2
Outline of our approach
3
Heat kernel expansions
4
Numerical examples
Approximations for local vol baskets · November 29, 2014 · Page 13 (30)
Heat kernels and geometry
dXt = b(Xt )dt + σ(Xt )dWt ,
∂2
1
∂
L = ai, j i j + bi i ,
2 ∂x ∂x
∂x
I
I
a = σT σ
Heat kernel: fundamental solution p(x, y, t) of
Transition density of Xt
∂
∂t u
= Lu
"Can you hear the shape of the drum?"(Kac ’66)
Take L = ∆ on a domain D and relate:
I
Geometrical properties of the domain D
I
Partition function Z =
I
Heat kernel
I
E.g. −γk ∼ C(n)(k/ vol D)2/n (Weyl, ’46)
I
E.g. (for n = 2): Z =
P
k∈N e
area
4πt
−
γk t
circ.
√
4πt
+ O(1) (McKean & Singer, ’67)
Approximations for local vol baskets · November 29, 2014 · Page 14 (30)
Heat kernels and geometry
dXt = b(Xt )dt + σ(Xt )dWt ,
∂2
1
∂
L = ai, j i j + bi i ,
2 ∂x ∂x
∂x
I
I
a = σT σ
Heat kernel: fundamental solution p(x, y, t) of
Transition density of Xt
∂
∂t u
= Lu
"Can you hear the shape of the drum?"(Kac ’66)
Take L = ∆ on a domain D and relate:
I
Geometrical properties of the domain D
I
Partition function Z =
I
Heat kernel
I
E.g. −γk ∼ C(n)(k/ vol D)2/n (Weyl, ’46)
I
E.g. (for n = 2): Z =
P
k∈N e
area
4πt
−
γk t
circ.
√
4πt
+ O(1) (McKean & Singer, ’67)
Approximations for local vol baskets · November 29, 2014 · Page 14 (30)
Heat kernels and geometry
dXt = b(Xt )dt + σ(Xt )dWt ,
∂2
1
∂
L = ai, j i j + bi i ,
2 ∂x ∂x
∂x
I
I
a = σT σ
Heat kernel: fundamental solution p(x, y, t) of
Transition density of Xt
∂
∂t u
= Lu
"Can you hear the shape of the drum?"(Kac ’66)
Take L = ∆ on a domain D and relate:
I
Geometrical properties of the domain D
I
Partition function Z =
I
Heat kernel
I
E.g. −γk ∼ C(n)(k/ vol D)2/n (Weyl, ’46)
I
E.g. (for n = 2): Z =
P
k∈N e
area
4πt
−
γk t
circ.
√
4πt
+ O(1) (McKean & Singer, ’67)
Approximations for local vol baskets · November 29, 2014 · Page 14 (30)
The Riemannian metric associated to a diffusion
dXt = b(Xt )dt + σ(Xt )dWt ,
∂2
∂
1
L = ai j i j + bi i ,
2 ∂x ∂x
∂x
I
On Rn (or a submanifold), introduce gi j B ai j , Riemannian metric
tensor (gi j (x))ni, j=1 B (gi j (x))ni, j=1
I
Geodesic distance: Z
d(x, y) B
I
I
a = σT σ
1
inf
z(0)=x, z(1)=y
qX
−1
gi j (z(t))żi (t)ż j (t)dt
0
inf attained by a smooth curve, the geodesic
− 1
1
Laplace-Beltrami operator: ∆g = det(gi j ) 2 ∂x∂ i det(gi j ) 2 gi j ∂x∂ j
1
∂2
∂
1
∂
L = ai j i j + bi i = ∆g + hi i
2 ∂x ∂x
2
∂x
∂x
Approximations for local vol baskets · November 29, 2014 · Page 15 (30)
The Riemannian metric associated to a diffusion
dXt = b(Xt )dt + σ(Xt )dWt ,
∂2
∂
1
L = ai j i j + bi i ,
2 ∂x ∂x
∂x
I
On Rn (or a submanifold), introduce gi j B ai j , Riemannian metric
tensor (gi j (x))ni, j=1 B (gi j (x))ni, j=1
I
Geodesic distance: Z
d(x, y) B
I
I
a = σT σ
1
inf
z(0)=x, z(1)=y
qX
−1
gi j (z(t))żi (t)ż j (t)dt
0
inf attained by a smooth curve, the geodesic
− 1
1
Laplace-Beltrami operator: ∆g = det(gi j ) 2 ∂x∂ i det(gi j ) 2 gi j ∂x∂ j
1
∂2
∂
1
∂
L = ai j i j + bi i = ∆g + hi i
2 ∂x ∂x
2
∂x
∂x
Approximations for local vol baskets · November 29, 2014 · Page 15 (30)
The Riemannian metric associated to a diffusion
dXt = b(Xt )dt + σ(Xt )dWt ,
∂2
∂
1
L = ai j i j + bi i ,
2 ∂x ∂x
∂x
I
On Rn (or a submanifold), introduce gi j B ai j , Riemannian metric
tensor (gi j (x))ni, j=1 B (gi j (x))ni, j=1
I
Geodesic distance: Z
d(x, y) B
I
I
a = σT σ
1
inf
z(0)=x, z(1)=y
qX
−1
gi j (z(t))żi (t)ż j (t)dt
0
inf attained by a smooth curve, the geodesic
− 1
1
Laplace-Beltrami operator: ∆g = det(gi j ) 2 ∂x∂ i det(gi j ) 2 gi j ∂x∂ j
1
∂2
∂
1
∂
L = ai j i j + bi i = ∆g + hi i
2 ∂x ∂x
2
∂x
∂x
Approximations for local vol baskets · November 29, 2014 · Page 15 (30)
Heat kernel expansion
2
d (x0 , x)
q
e− 2T
pN (x0 , x, T ) = det(g(x)i j )U N (x0 , x, T )
n
(2πT ) 2
I
I
I
PN
U N (x0 , x, T ) = k=0
uk (x0 , x)T k , the heat kernel coefficients
R
√
u0 (x0 , x) = ∆(x0 , x)e z hh(z(t)) , ż(t)ig dt
∆ is the Van Vleck-DeWitt determinant:
∂2 d2
1
det − 12 ∂x
.
∆(x0 , x) = √
0 ∂x
det(g(x0 )i j ) det(g(x)i j )
e z hh(z(t)) , ż(t)ig dt is the exponential of the work done by the vector
field h along the geodesic
h p z joiningi x0 to x with
∂
1
i
i
det(gi j )gi j
h =b − √
∂x j
R
I
2
det(gi j )
Approximations for local vol baskets · November 29, 2014 · Page 16 (30)
Heat kernel expansion
2
d (x0 , x)
q
e− 2T
pN (x0 , x, T ) = det(g(x)i j )U N (x0 , x, T )
n
(2πT ) 2
I
I
I
PN
U N (x0 , x, T ) = k=0
uk (x0 , x)T k , the heat kernel coefficients
R
√
u0 (x0 , x) = ∆(x0 , x)e z hh(z(t)) , ż(t)ig dt
∆ is the Van Vleck-DeWitt determinant:
1
∂2 d2
∆(x0 , x) = √
det − 12 ∂x
.
0 ∂x
det(g(x0 )i j ) det(g(x)i j )
e z hh(z(t)) , ż(t)ig dt is the exponential of the work done by the vector
field h along the geodesic
h p z joiningi x0 to x with
∂
1
i
i
h =b − √
det(gi j )gi j
∂x j
R
I
2
det(gi j )
Approximations for local vol baskets · November 29, 2014 · Page 16 (30)
Heat kernel expansion – 2
Assumption
The cut-locus of any point is empty,
Theorem (Varadhan ’67)
b = 0, σ uniformly Hölder continuous, system uniformly elliptic, then
limT →0 T log p(x, y, T ) = − 12 d(x, y)2 .
Theorem (Yosida ’53)
On a compact Riemannian manifold, assume smooth vector fields and
an ellipticity property. Then p(x, y, T ) − pN (x, y, T ) = O(T N ) as T → 0.
Theorem (Azencott ’84)
For a locally elliptic system in an open set U ⊂ Rn , x, y ∈ U
s. t. d(x, y) < d(x, ∂U) + d(y, ∂U), we have
p(x, y, T ) − pN (x, y, T ) = O(T N ) as T → 0.
Approximations for local vol baskets · November 29, 2014 · Page 17 (30)
The local vol case
I
Domain Rn+ , dFi (t) = σi (Fi (t))dWi (t),
i = 1, . . . , n
∂2
I
L = 12 ρi j σi (xi )σ j (x j ) ∂xi ∂x j
I
Let A ∈ Rn×n be such that AρAT = In . Change variables
F → y → x according to
yi =
Fi
Z
0
I
du
, i = 1, . . . , n,
σi (u)
x = Ay,
L→
1 ∂2 1
∂
− Aik σ0k (Fk )
2
2 ∂xi 2
∂xi
Isomorphic (up to boundary) to Euclidean geometry:
d(F0 , F) = |x0 − x|
I
Geodesics known in closed form
I
CEV case: σi (Fi ) = σi Fi i , zeroth and first order heat kernel
coefficients given explicitly
β
Approximations for local vol baskets · November 29, 2014 · Page 18 (30)
The local vol case
I
Domain Rn+ , dFi (t) = σi (Fi (t))dWi (t),
i = 1, . . . , n
∂2
I
L = 12 ρi j σi (xi )σ j (x j ) ∂xi ∂x j
I
Let A ∈ Rn×n be such that AρAT = In . Change variables
F → y → x according to
yi =
Fi
Z
0
I
du
, i = 1, . . . , n,
σi (u)
x = Ay,
L→
1 ∂2 1
∂
− Aik σ0k (Fk )
2
2 ∂xi 2
∂xi
Isomorphic (up to boundary) to Euclidean geometry:
d(F0 , F) = |x0 − x|
I
Geodesics known in closed form
I
CEV case: σi (Fi ) = σi Fi i , zeroth and first order heat kernel
coefficients given explicitly
β
Approximations for local vol baskets · November 29, 2014 · Page 18 (30)
The local vol case
I
Domain Rn+ , dFi (t) = σi (Fi (t))dWi (t),
i = 1, . . . , n
∂2
I
L = 12 ρi j σi (xi )σ j (x j ) ∂xi ∂x j
I
Let A ∈ Rn×n be such that AρAT = In . Change variables
F → y → x according to
yi =
Fi
Z
0
I
du
, i = 1, . . . , n,
σi (u)
x = Ay,
L→
1 ∂2 1
∂
− Aik σ0k (Fk )
2
2 ∂xi 2
∂xi
Isomorphic (up to boundary) to Euclidean geometry:
d(F0 , F) = |x0 − x|
I
Geodesics known in closed form
I
CEV case: σi (Fi ) = σi Fi i , zeroth and first order heat kernel
coefficients given explicitly
β
Approximations for local vol baskets · November 29, 2014 · Page 18 (30)
The local vol case
I
Domain Rn+ , dFi (t) = σi (Fi (t))dWi (t),
i = 1, . . . , n
∂2
I
L = 12 ρi j σi (xi )σ j (x j ) ∂xi ∂x j
I
Let A ∈ Rn×n be such that AρAT = In . Change variables
F → y → x according to
yi =
Fi
Z
0
I
du
, i = 1, . . . , n,
σi (u)
x = Ay,
L→
1 ∂2 1
∂
− Aik σ0k (Fk )
2
2 ∂xi 2
∂xi
Isomorphic (up to boundary) to Euclidean geometry:
d(F0 , F) = |x0 − x|
I
Geodesics known in closed form
I
CEV case: σi (Fi ) = σi Fi i , zeroth and first order heat kernel
coefficients given explicitly
β
Approximations for local vol baskets · November 29, 2014 · Page 18 (30)
Outline
1
Introduction
2
Outline of our approach
3
Heat kernel expansions
4
Numerical examples
Approximations for local vol baskets · November 29, 2014 · Page 19 (30)
Implementation
I
Optimization problem for F∗ is non-linear with a linear constraint
I
, it is a quadratic optimization problem with
With qi B F σdu
i (u)
0,i
non-linear constraint
I
Fast convergence of Newton iteration for suitable initial guess
I
Given F∗ , C(F0 , F∗ ) is a line integral along the geodesic; this
integral can be calculated in closed form in the CEV model.
I
Formulas can be evaluated in less than 2 seconds for n = 100
R Fi
Our work relies on the principle of not feeling the boundary and on
non-degeneracy of the minimization problem.
Approximations for local vol baskets · November 29, 2014 · Page 20 (30)
Implementation
I
Optimization problem for F∗ is non-linear with a linear constraint
I
, it is a quadratic optimization problem with
With qi B F σdu
i (u)
0,i
non-linear constraint
I
Fast convergence of Newton iteration for suitable initial guess
I
Given F∗ , C(F0 , F∗ ) is a line integral along the geodesic; this
integral can be calculated in closed form in the CEV model.
I
Formulas can be evaluated in less than 2 seconds for n = 100
R Fi
Our work relies on the principle of not feeling the boundary and on
non-degeneracy of the minimization problem.
Approximations for local vol baskets · November 29, 2014 · Page 20 (30)
Implementation
I
Optimization problem for F∗ is non-linear with a linear constraint
I
, it is a quadratic optimization problem with
With qi B F σdu
i (u)
0,i
non-linear constraint
I
Fast convergence of Newton iteration for suitable initial guess
I
Given F∗ , C(F0 , F∗ ) is a line integral along the geodesic; this
integral can be calculated in closed form in the CEV model.
I
Formulas can be evaluated in less than 2 seconds for n = 100
R Fi
Our work relies on the principle of not feeling the boundary and on
non-degeneracy of the minimization problem.
Approximations for local vol baskets · November 29, 2014 · Page 20 (30)
Implementation
I
Optimization problem for F∗ is non-linear with a linear constraint
I
, it is a quadratic optimization problem with
With qi B F σdu
i (u)
0,i
non-linear constraint
I
Fast convergence of Newton iteration for suitable initial guess
I
Given F∗ , C(F0 , F∗ ) is a line integral along the geodesic; this
integral can be calculated in closed form in the CEV model.
I
Formulas can be evaluated in less than 2 seconds for n = 100
R Fi
Our work relies on the principle of not feeling the boundary and on
non-degeneracy of the minimization problem.
Approximations for local vol baskets · November 29, 2014 · Page 20 (30)
Numerical examples
I
CEV model framework
I
For CEV, the formulas are fully explicit apart from the minimizing
configuration F∗
I
We observe very fast convergence of the iteration, but the initial
guess is crucial.
I
Reference values obtained using:
I
I
I
Ninomiya Victoir discretization
Quasi Monte Carlo based on Sobol numbers, Monte Carlo
for very high dimensions (n ≈ 100)
Variance (dimension) reduction using Mean value Monte
Carlo based on one-dimensional Black-Scholes prices
Approximations for local vol baskets · November 29, 2014 · Page 21 (30)
Numerical examples
I
CEV model framework
I
For CEV, the formulas are fully explicit apart from the minimizing
configuration F∗
I
We observe very fast convergence of the iteration, but the initial
guess is crucial.
I
Reference values obtained using:
I
I
I
Ninomiya Victoir discretization
Quasi Monte Carlo based on Sobol numbers, Monte Carlo
for very high dimensions (n ≈ 100)
Variance (dimension) reduction using Mean value Monte
Carlo based on one-dimensional Black-Scholes prices
Approximations for local vol baskets · November 29, 2014 · Page 21 (30)
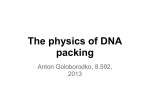
CEV index implied vol – three-dimensional visualization
0.25
0.20
0.15
Implied vol
Basket
St. 1 (F0 = 10, β = 0.3, σ = 0.9)
St. 2 (F0 = 11, β = 0.2, σ = 0.7)
St. 3 (F0 = 17, β = 0.2, σ = 0.9)
●
●
●
●
0.10
●
−0.6
−0.4
●
●
−0.2
●
●
●
0.0
●
0.2
log(K F0)
Approximations for local vol baskets · November 29, 2014 · Page 22 (30)
●
●
0.4
●
●
0.6
●
25
20
15
10
St. 1 (F0 = 10, β = 0.3, σ = 0.9)
St. 2 (F0 = 11, β = 0.2, σ = 0.7)
St. 3 (F0 = 17, β = 0.2, σ = 0.9)
5
Optimal component strike
30
CEV index implied vol – three-dimensional visualization
20
30
40
50
Basket strike
Approximations for local vol baskets · November 29, 2014 · Page 22 (30)
60
70
Normalized errors
I
I
I
Approximation error supposed to depend on “dimension-free”
time to maturity σ2 T
P
Use σ B σN,B (F0 )/ ni=1 wi F0,i as proxy in local vol framework
Normalized error: Rel. 2error
σ T
T
0.5
1
2
5
10
σ
Dim. 5
Dim. 10
Dim. 15
Dim. 100
0.1555
0.1481
0.1429
0.1376
0.1328
0.1704
−0.0293
−0.0261
−0.0218
−0.0129
−0.0035
0.3187
0.3085
0.3162
0.3222
0.3252
0.3198
0.1073
−0.0143
−0.0105
−0.0075
0.2964
Table: Normalized relative error of the zero-order asymptotic prices.
Approximations for local vol baskets · November 29, 2014 · Page 23 (30)
Normalized errors
I
I
I
Approximation error supposed to depend on “dimension-free”
time to maturity σ2 T
P
Use σ B σN,B (F0 )/ ni=1 wi F0,i as proxy in local vol framework
Normalized error: Rel. 2error
σ T
T
0.5
1
2
5
10
σ
Dim. 5
Dim. 10
Dim. 15
Dim. 100
−4.02 × 10−4
−9.47 × 10−4
−1.63 × 10−3
−3.41 × 10−3
−7.15 × 10−3
0.1704
1.76 × 10−4
3.58 × 10−3
8.09 × 10−3
1.71 × 10−2
2.67 × 10−2
0.3187
8.76 × 10−3
1.53 × 10−3
−3.92 × 10−3
−1.33 × 10−2
−2.82 × 10−2
0.1073
5.06 × 10−5
2.08 × 10−3
3.89 × 10−3
0.2964
Table: Normalized error of the first order asymptotic prices.
Approximations for local vol baskets · November 29, 2014 · Page 23 (30)
First order prices
15
●
●
10
●
Price
●
T = 0.5
T=1
T=2
T=5
T = 10
5
●
●
●
●
0
●
15
20
25
30
35
Strike
Approximations for local vol baskets · November 29, 2014 · Page 24 (30)
●
●
40
●
45
●
1e−02
●
●
●
●
●
●
●
●
1e−04
●
●
●
●
●
●
●
1e−06
Relative error of price
Relative errors
Zeroth order
First order
●
●
●
●
15
20
●
●
●
●
25
30
35
Strike
Approximations for local vol baskets · November 29, 2014 · Page 25 (30)
40
45
2e−04
5e−05
●
●
1e−05
Relative error
1e−03
5e−03
Relative error ATM
T = 0.5
T = 1.0
T = 2.0
T = 5.0
T = 10.0
2e−06
●
20.90
20.95
21.00
21.05
K
Approximations for local vol baskets · November 29, 2014 · Page 26 (30)
21.10
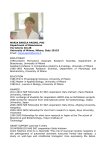
Delta
1
0.3
0.1
13
F0 = 9 , ξ = 0.7 , β = 0.7 , w = 1
−1
0.5
0.6
9
1.0000 0.9142 0.7706
ρ = 0.9142 1.0000 0.8429 .
0.7706 0.8429 1.0000
I
Objective: Compute the sensitivity (delta) w.r.t.F0,3 .
I
Note that the option payoff is
P(F) = (F1 + F2 − F3 − K)+
Approximations for local vol baskets · November 29, 2014 · Page 27 (30)
Delta
●
●
●
●
0.0
T=5
0.0
T = 0.5
−0.2
−0.2
●
●
●
●
●
●
−0.4
−0.4
●
●
●
●
−0.6
●
−1.0
●
●
6
●
●
8
MC Delta
0 order Delta
1 order Delta
●
10
12
14
16
18
●
●
20
●
●
●
−1.0
−0.8
●
−0.8
−0.6
●
MC Delta
0 order Delta
1 order Delta
●
6
8
10
Strike
Approximations for local vol baskets · November 29, 2014 · Page 28 (30)
12
14
Strike
16
18
20
Relative error of delta
1e−04
1e−04
1e−02
T=5
1e−02
T = 0.5
6
8
10
12
14
16
18
0 order Delta
1 order Delta
1e−06
1e−06
0 order Delta
1 order Delta
20
6
8
10
Strike
Approximations for local vol baskets · November 29, 2014 · Page 29 (30)
12
14
Strike
16
18
20
References
M. Avellaneda, D. Boyer-Olson, J. Busca, P. Friz: Application of large
deviation methods to the pricing of index options in finance,
C. R. Math. Acad. Sci. Paris, 336(3), 2003.
R. Azencott: Densité des diffusions en temps petit: développements
asymptotiques I, Seminar on probability XVIII, L. N. M. 1059, 1984.
C. Bayer, P. Friz, P. Laurence: On the probability density of baskets,
Proceedings, 2015.
C. Bayer, P. Laurence: Asymptotics beats Monte Carlo: The case of
correlated local vol baskets, Comm. Pure Appl. Math., 2014.
C. Bayer, P. Laurence: Small time expasions for the ATM implied volatility
in multi-dimensional local volatility models, Proceedings, 2015.
J. Gatheral, E. P. Hsu, P. Laurence, C. Ouyang, T.-H. Wang: Asymptotics
of implied volatility in local volatility models, Math. Fin., 2010.
K. Yosida: On the fundamental solution of the parabolic equation in a
Riemannian space, Osaka Math. J. 5, 1953.
Approximations for local vol baskets · November 29, 2014 · Page 30 (30)