Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
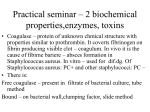
Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” FORCE AND PRESSURE MEASURING TRANSDUCERS 1. Scope of the experiments The aim of the exercise is to: - learning of principles of operation and construction of force and pressure transducers popular in industrial practice, , - getting knowledge of the issues associated with the calibration of measurement transducers and meters. 2. Introduction 1) The measurement of forces, tensions and pressures are performed both in industrial installations and in other situations (e.g. weighing). They are carried out for objects of different states of aggregation (solids, liquids, gases, vapors and suspension), under static conditions (measurement object doesn't move) and kinetic (moving measurement object). Since the force, tension and pressure values are closely related, and their effects are similar, issues relating to the measurement are considered together. The effect of the force on a rigid body is its deformation and usually the accompanying changes in physical properties of the body, such as magnetic permeability, electrical conductivity, natural frequency, etc. In case of force measurement usually the effect of focused forces (i.e. applied to the test object at a specific point) is examined. In the case of measurement of mechanical tension and pressure the effect of force distributed over a specified area is examined. The term mechanical tension to be understood distributed intensity of the force acting in a direction tangential to the surface in question and the pressure may be treated as distributed intensity of the force acting in the direction normal to the surface in question. In the International System of Units (SI) unit of force is 1 N, and the unit of stress and pressure is 1 N/m2 (1 Pa). Also derivative units and so-called technical units are used in practice. The measurement of force can be done by measuring the effects of the force acting on the sensor of gauge-meter. Force causes a deformation of the elastic element of the sensor, which in turn can be converted into an electrical signal. Was developed a variety of structures of transducers to measure forces and pressures. The aim of the exercise is to know and laboratory testing of selected types of industrial measuring transducers of pressure and force, in which the output signal is of electric nature. Today, such transducers are the most used in practice because of the convenience of electrical signals for further analog (amplification, filtering), and digital processing. These transducers are composed of three basic elements: • Resilient element - a suitable mechanical structure in which as a result of the force (pressure) arise stresses and deformation of the selected elements. These elements are designed in such a 1) More detailed information on this topics can be find in: Zakrzewski J., Kampik M.: Sensory i przetworniki pomiarowe. Wyd. Polit. Śląskiej, Gliwice 2013, part 7. Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” way that when the force (pressure) is within the measuring range, the resulting deformations are as high as possible (due to desired high sensitivity of transducer), but within the elastic range of materials. • The sensor mounted permanently to the mechanical part of the transmitter, whose task is to convert the strain onto the convenient electrical parameter (i.e. resistance, capacitance) or an electrical signal (electric voltage, electric charge). • The signal conditioning circuit that additionally converts the electrical signal (or parameter) to obtain an output signal with a range convenient for transmission to other devices and / or further processing, e.g. analog-to-digital converter (ADC). In industrial applications, are often used voltage 0..5 V, 0-10 V, or current 0..20 mA, 4..20 mA. 3. Force measuring converters (force transducers) The deformation of the elastic element of a force transducer depends on the method of application of the measured force. Typical methods of force application are shown in Figure 1. On the surface of the elastic element stress sensor is glued. This sensor (called strain gauge) is stretched (marked T+) or compressed (T-) according to how this surface deforms under stress. a) c) b) F +T M +T σ σ T −σ -T F -T F Fx Fig. 1. Typical methods of application of the measured force F to the elastic element of the force transducer: stretching (a), bending (b), torsion (c). Strain gauge sensor (pol. czujnik tensometryczny, tensometr) is a converter of the object strain, due to the existing stress, into other quantity, usually of electrical nature. A consequence of the strain effect is to change the selected parameter, such as resistance, permeability, piezoelectric effect, the index of refraction or reflection of light, etc. The most popular are resistive strain gauges which usually work in the electrical bridge circuit (see Fig. 3b) supplied from an external stabilized power source. The voltage in unbalance of the bridge is the output signal of transducer. Resistive strain gauges have a special design to enable attachment them on the surface of the object in order to deform thereby along this surface. The sensitivity of the strain gauge (deformation sensitivity) depends on the direction of strain and the strain gauge construction. Strain gauges may be of different shapes and constructions. The most common are built to respond to the deformation only in one direction, however, there are special structures, such as Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” spiral strain gauges, rosette strain gauges etc., sensitive to deformation in many directions. Such structures are particularly suitable for measurement of the torque, the stresses in the membranes of the pressure transducers etc. Figure 2 shows the constructions of selected types of strain gauges. The active element of the strain gauge (resistor) is made of a shaped metallic conductor or a semiconductor wafer. This element is placed between layers of insulating paper or film. Strain gauge is mounted on the surface the tested object using a special adhesive that is selected according to the material of the strain gauge and the test object. The mechanical properties of the adhesive (stiffness, temperature coefficient of linear expansion, heterogeneity, the effect of creep) significantly affect the characteristics of the sensitivity of the strain gauge. a) b) c) 3 2 1 Fig. 2. Simplified construction sketches of selected types of resistive strain gauge; a) - serpentine wire, b) - a foil meander, c) - the so-called. rosette strain gauge 1 - gage rod (wire, foil), 2 - pad (paper or insulation foil), 3 – pin, connector Considering wire strain gauge, there is tension σ in the rods, the relative deformation ε can be determined based on Hooke's law: ε= where l is the length of the rod, σ = ∆l l = σ E (1) F the tension, A is the cross-sectional area of the rod, E – A Young’s modulus. The electrical resistance of the metallic rod describes the general relationship: l R=ρ A where ρ is the resistivity of the rod material. The change of resistance of the deformed rode can be determined by calculating the total differential of equation (2): ∂R ∂R ∂R l ρ ρl dR = dρ + dl + dA = dρ + dl − 2 dA ∂l A A ∂ρ ∂A A (2) (3) Each of the parameters (ρ, l, A) is changing due to the stress in the rod. The relative change of the dA dr round rod is equal to ≈ 2 , the cross-section changing of the rod associated with the change A r dA dl of its length is = −2 µ = −2 µ ε , where µ ≈ 0,3 is the Poisson ratio. After taking into A l account these formulas the relative change of resistance of the strain gauge is: dR dρ = ε (1 + 2µ ) + (4) R ρ Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” The characteristic parameter of strain gauge is the so called deformation sensitivity, which is calculated by dividing the equation (4) by the relative elongation of the rod ε. dR dR 1 dρ 1 K= ⋅ = R = (1 + 2µ ) + ⋅ (5) dl R ε ρ ε l The sensitivity of deformation is dependent on the material constants of the strain gauge and design parameters, whose precise values are not known. In practice, the exact value of this parameter is determined from measurements of resistance increases ∆R induced by uniaxial tension increments. Assuming parameters ε=0,2%, µ≈0,3 and ignoring small metal piezoresistivity (a change of ρ under stress), can be estimated the deformation sensitivity K≈2,6. This means that if the stress generated under the influence of the relative elongation of 0,1% will be e.g., the relative change in resistance is then equal to approx. 0,26%. This value is very small and thus difficult to directly measure. It is necessary to use a bridge circuit for converting the resistance into output voltage (Fig. 3b). Such small changes in resistance strain gauges are also inconvenient due to the dependence of the resistance of metals with temperature. Changes are on the same level. Bridge circuit allows minimizing this effect, as explained below. Force transducer metrological characteristics depend not only on the properties of the strain gauges, but primarily on the parameters of the elastic element of the sensor. Elastic elements of load cells are usually made of spring steel and have different shapes, e.g., hollow or solid cylinder or a frame. In Figure 3a is shown sketch of the construction of a sensor with an elastic element in the shape of a rectangular frame. There are marked the forces acting on the frame under the assumption them non-axial (oblique) touchdowns. Also shown arrangement of strain gauges glued to the side walls. Strain T1 and T3 are active elements (respond to the stresses because they are glued longitudinally), and T2 and T4 are passive (not subject to stress, are glued transversely). Passive strain gauges are only used to compensate for the changes in temperature, since, as mentioned earlier, the resistance of the strain gauge depends not only on stress but also on the temperature. Compensation is possible by means of an electrical bridge circuit, as shown in Figure 3b. The output voltage Um depends on the change in resistance of strain gauges. Temperature affects the resistance of all the strain gauges in the same way, without changing the output voltage. Stress causes the resistance changes only of the active strain gauges T1 and T3, placed in opposite branches of the electrical bridge, which makes the output voltage Um depends on the stress in the elastic element. An important factor in deteriorating accuracy of force is its non-axial touchdown. If the transmitter is loaded with axial force (in the direction of the x axis), the side walls of frame deform equally. In the case of oblique application of force to the sensor, the axial component Fx and the orthogonal component Fz act on the frame. The orthogonal component acting in the zdirection generates an additional bending moment in the columns of the frame. As a result, extension of strain gauges consist of deformation caused by the axial component Fx, which are the same for both columns, and deformations caused by the action of the component Fz, equal in value but of opposite signs. The resulting output voltage is not adequate to the applied force F there is an additional measurement error. Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” a) α F b) x Fx RT1 Fz T3 RT2 z y Uz RT3 RT4 T4 Um T2 T1 Fig. 3. Sketch of the load cell construction (a) and the system of electrical connections of strain gauges (b). 4. Pressure measuring transducers The pressure transducers are frequently of constructions, which are schematically shown in Fig. 4. Due to the difference of the measured pressure p and the reference pressure po occurs a deformation of a particular element. This deformation is converted into an electrical parameter in a different manners, for example by the use of strain gauges glued to the membrane (Fig. 4c, 6a), by the displacement transducer (LVDT, as shown in Fig. 5 or capacitive - Fig. 6c). b) c) po po elongation elongation a) po deflection membrane strain gauges p p p Fig. 4. The most common constructions of mechanical parts of pressure transducers: Bourdon tube (s), bellows (b) and an elastic membrane (c). A sketch showing the details of construction of transducer with Bourdon tube is shown in Figure 5. The pressure p, greater than atmospheric pressure, is applied to the inside of a closed chamber in the shape of a curved tube. This deforms (straightens) of the tube. Shifting of the tube end is converted to a voltage by means of a LVDT transducer. The output voltage is proportional to the measured pressure. The figure shows also a scale and pointer, which allows direct reading of the measured pressure. The advantage of Bourdon tube transducers the linear characteristic, high sensitivity, wide measuring range and high mechanical strength. The disadvantage is not Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” very high accuracy (uncertainty 1% ÷ 5% of measuring range) resulting from the dependence of properties of the material on the temperature and mechanical backlash. Bourdon tube A-A spring and gear Scale Uout ~p connector LVDT p Fig. 5. Sketch of construction of the pressure gauge with Bourdon tube Uout - output voltage Considerable increase in accuracy is achieved in the constructions without the indicating mechanism shown schematically in Figure 6. Prevalent today can-type sensors in which the mechanical part is made in monolithic form. The resilient element in these sensors is a substrate of silicon dioxide; the piezoresistors are the diffused semiconductors having piezoelectric coefficients with different signs. These are typically connected in the resistance bridge circuit, similarly as in Fig. 3b. Monolithic sensors are characterized by small size, compact and robust design, high sensitivity, relatively low temperature sensitivity, very low inertia and low hysteresis. a) p T- T+ 1 p po p 2 b) 1 5 3 po T- T+ 2 4 Fig. 6. Selected structures of can-type pressure sensors with pressure chamber and membrane with strain gauges (a) and with diaphragm and differential capacitive sensor (b) 1 – pressure chamber, 2 – membrane, diaphragm, 3 – strain gauges, 4 – electrical connectors, 5 – insulating bushing Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” The deformation of the pressure chamber is converted into a resistance change by means of strain gauges T + and T- (Fig. 6a), or changes in the differential capacitance (Fig. 6b). Strain gauges typically operate in the bridge circuit and the capacitive sensor operates in the transformer differential circuit of high frequency. Today are prevalent the can-type sensors in which the mechanical part is made in monolithic form. The resilient element is made of silicon dioxide with diffused semiconductor piezoresistors which have the piezoelectric coefficients with different signs. These are typically connected to the resistance bridge circuit, similarly as in Fig. 3b. Monolithic sensors are characterized by small size, compact and robust design, high sensitivity, relatively low temperature sensitivity, very low inertia and low hysteresis. Small dimensions of integrated pressure sensors, high rigidity of the elastic element and very small deformation allows to get sensors for measuring in ranges less than 0.01 MPa and over of 100 MPa. Figure 7 shows an example of construction of a monolithic integrated piezoresistive pressure sensor and the measuring circuit. a) p b) case UZ c) R S1 resilient element R+ Podłoże base R- R+ R+ RP2 R- Podłoże UZ R- R+ RZ insulating bushing Um R S2 electirc connector. vent hoole RP1 R- Um Fig. 7. Construction of the piezoresistive pressure sensor (a), basic electrical bridge circuit of the sensor (b) and a modified circuit with the possibility of linearization and calibration of characteristics through the choice of auxiliary resistorsRP1, RP2, RS1, RS2, RZ (c). Increasingly being used semiconductor piezoresistive sensors integrated structurally (a "chip") with the electronics and connected to the microprocessor system. This allows not only process the measured pressure into an electrical signal, but also, if correspondingly programmed, automatically set many other parameters and perform additional functions, e.g. sending the results via the built-in interfaces. Such structures are called "smart transmitters" (pol. przetworniki inteligentne 1)). 5. Laboratory stands 5.1. Investigation of force transducers Figure 8 shows a sketch of stand for testing the force transducers. Two industrial strain gauge force transducers are examined: No 1 in Fig. 8, with a measuring range of 5 kN and the 7, with the 1) e.g.: Kwaśniewski J.: Wprowadzenie do inteligentnych przetworników pomiarowych, WNT, Warszawa, 1993. Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” range of 4 kN. The transmitters are adapted to measure the tensile forces. The transducer 1 is mounted on a base beam with a row of equally-spaced holes and its pin is connected via a pushbar 3 to the transducer 7 mounted in the saddle 4 of the testing machine. Use the dial 5, through worm gears, moves the slide setting the required value of tension force F. The angle α of application of force to the transducer 1 is determined by selecting an appropriate mounting hole in the beam 2. The values of force for transmitters 1 and 7 are read at the readout devices 6 and 8, respectively. Before the measurements by dial 5 should be set a minimum initial tension, at which there is no backlash at joints. After that a zero adjustment should be perform for measuring instruments 6 and 8. 8 F 1998 7 4 α Electronic circuit 3 Digital voltmeter 1 h 6 2 5 b F Fig. 8. Sketch of a device for testing of force transducers. Research is performed in two stages. In the first stage the transducer 1 acts as a reference (standard). It is mounted in such a way that the force F acts axially. The aim is designation of errors of the transducer 7 (the inspection of it). Errors should be determined for different values of force - approx. 20 values in the whole range. In the second stage the transducer 7 takes a role of standard (to be reported corrections for previously designated errors). This time the aim is designation of an additional error of the Institute of Measurement Science, Electronics and Control, Laboratory of “Fundamentals in Metrology” transducer 1 as a result of non-axial application of force F. The measurements are repeated at different angles of the applied force. 5.1. Investigation of pressure transducers The measuring system for calibration of pressure transmitters and gauges used hydraulic oil system, as shown in Figure 9. The reference pressure is generated by means of a piston-weight device using calibrated weights aggravating the piston. Operation of the system is based on the principle of a hydraulic press. Measurements rely on standard pressure setting and reading indications of the tested devices. The study of results should include a plot of the calculated corrections and the accuracy class of the tested instrument should be determined. indicator of piston position standard weight sensor under test manometer under test piston expantion tank valve Zawór oil pump oil Fig. 9. A hydraulic piston-weight device for calibration of pressure transducer. Edited by: H. Urzędniczok, J. Leks, ver.: 02-2015