Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Pulse-width modulation wikipedia , lookup
Buck converter wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Three-phase electric power wikipedia , lookup
Voltage optimisation wikipedia , lookup
Standby power wikipedia , lookup
Mains electricity wikipedia , lookup
History of electric power transmission wikipedia , lookup
Power over Ethernet wikipedia , lookup
Amtrak's 25 Hz traction power system wikipedia , lookup
Audio power wikipedia , lookup
Wireless power transfer wikipedia , lookup
Electric power system wikipedia , lookup
Alternating current wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Electrification wikipedia , lookup
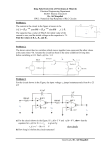
Power Factor Correction for Power Systems First Semester Report Spring Semester 2007 by Pamela Ackerman Prepared to partially fulfill the requirements for EE401 Department of Electrical and Computer Engineering Colorado State University Fort Collins, Colorado 80523 Report Approved: Project Advisor Senior Design Coordinator Abstract Wasted energy capacity, also known as poor power factor, is often overlooked. It can result in poor reliability, safety problems and higher energy costs. The lower your power factor, the less economically your system operates. The actual amount of power being used, or dissipated, in a circuit is called true power. Reactive loads such as inductors and capacitors make up what is called reactive power. The linear combination of true power and reactive power is called apparent power. Power system loads consist of resistive, inductive, and capacitive loads. Examples of resistive loads are incandescent lighting and electric heaters. Examples of inductive loads are induction motors, transformers, and reactors. Examples of capacitive loads are capacitors, variable or fixed capacitor banks, motor starting capacitors, generators, and synchronous motors. Power factor correction (PFC) is usually achieved by adding capacitive load to offset the inductive load present in the power system. The power factor of the power system is constantly changing due to variations in the size and number of the motors being used at one time. This makes it difficult to balance the inductive and capacitive loads continuously. There are many benefits to having power factor correction. As a customer the cost doesn’t get passed on for having a low power factor. As a utility company, equipment has a much longer life span and maintenance costs remain low. - ii - Table of Contents Title i Abstract ii Table of Contents iii List of Figures iv Chapters Chapter I – Types of Power 1 Chapter II – Power System Loads 2 Chapter III – Power Factor Defined 4 Chapter IV – Methods of Power Factor Correction 7 Chapter V – Benefits of Power Factor Correction 11 Chapter VI – Conclusions and Future Plans 11 References 12 Bibliography 12 - iv - List of Figures Figure 1 Types of Power with Equations 1 Figure 2 Resistive Load Circuit Example 3 Figure 3 Inductive Load Circuit Example 3 Figure 4 Resistive and Inductive Load Circuit Example 4 Figure 5 The Power Triangle 5 Figure 6 Power Factor Triangle Illustrating Effects of a Capacitor 8 Figure 7 Induction Motor Without Parallel Capacitor 9 Figure 8 Induction Motor With Parallel Capacitor 10 - iv - Chapter I – Types Types of Power The actual amount of power being used, or dissipated, in a circuit is called true power. It is measured in watts and is symbolized mathematically by the capital letter P. True power is a function of the circuit’s dissipative elements, such as resistances (R). [1] Reactive loads such as inductors and capacitors dissipate zero power, but the fact that they drop voltage and draw current gives the perception that they do dissipate power. This “dissipated power” is called the reactive power and is measured in Volt-Amps-Reactive (VAR). Reactive power is represented by the capital letter Q, and is a function of a circuit's reactance (X). [1] The combination of true power and reactive power is called apparent power. It is the product of a circuit's voltage and current, without reference to phase angle. Apparent power is measured in the unit of Volt-Amps (VA) and is symbolized by the capital letter S. Apparent power is a function of a circuit's total impedance (Z). [1] There are equations relating the three types of power to resistance, reactance, and impedance (all using scalar quantities): P =True Power P = I 2R P= V2 R Where P is measured in Watts V2 X Where Q is measured in VoltVolt-AmpsAmps-Reactive (VAR) Q = Reactive Power Q = I 2 X Q= V2 S = VI Z Where S is measured in VoltVolt-Amps (VA) S = Apparent Power S = I 2 Z Figure 1 -1- S= Chapter II – Power System Loads Power system loads consist of resistive, inductive, and capacitive loads. Examples of resistive loads are incandescent lighting and electric heaters. Examples of inductive loads are induction motors, transformers, and reactors. Examples of capacitive loads are capacitors, variable or fixed capacitor banks, motor starting capacitors, generators, and synchronous motors. [2] Inductive and capacitive loads are opposite in nature. Equal amounts of inductive and capacitive loads within the same system will offset each other leaving only real power. This is defined as a power factor of 1 or unity. When a unity power factor is achieved the real power (KW) or demand is equal to the apparent power (KVA). Achieving a unity power factor will provide the most efficient power system. [2] In a purely resistive circuit, all circuit power is dissipated by the resistor, voltage and current are in phase with each other, and the true power is equal to the apparent power (as seen in Figure 2). [1] In a purely reactive circuit, no circuit power is dissipated by the load. Rather, power is alternately absorbed from and returned to the AC source. Voltage and current are 90o out of phase with each other, and the reactive power is equal to the apparent power (as seen in Figure 3). [1] In a circuit consisting of both resistance and reactance, there will be more power dissipated by the load than returned, but some power will definitely be dissipated and some will merely be absorbed and returned. Voltage and current in such a circuit will be out of phase by a value somewhere between 0o and 90o. The apparent power is vector sum of the true power and the reactive power (as seen in Figure 4). [1] -2- P = True power = I2R = 240 Watts Q = Reactive power = I2X = 0 KVAR S = Apparent power = I2Z = 240 VA Figure 2: Resistive load only P = True power = I2R = 0 Watts Q = Reactive power = I2X = 238.73 KVAR S = Apparent power = I2Z = 238.73 VA Figure 3: Inductive load only -3- P = True power = I2R = 119.365 Watts Q = Reactive power = I2X = 119.998 KVAR S = Apparent power = I2Z = 169.256 VA Figure 4: Resistive and inductive load Chapter III III – Power Factor Defined In power systems, wasted energy capacity, also known as poor power factor, is often overlooked. It can result in poor reliability, safety problems and higher energy costs. The lower your power factor, the less economically your system operates. Power factor is the ratio between the real power and the apparent power drawn by an electrical load. Like all ratio measurements it is a unit-less quantity and can be represented TruePower KW , where PF is power factor, kW is the real mathematically as PF = = ApparentPo wer KVA power that actually does the work, KVA is the apparent power and KVAR (not included in the equation) is the reactive power. In an inductive load, such as a motor, active power performs -4- the work and reactive power creates the electromagnetic field. The three types of power relate to each other in a trigonometric form as seen in Figure 5 below. [2] Figure 5: The Power Triangle For the purely resistive circuit, the power factor is 1 (perfect), because the reactive power equals zero. Here, the power triangle would look like a horizontal line, because the opposite (reactive power) side would have zero length. For the purely inductive circuit, the power factor is zero, because true power equals zero. Here, the power triangle would look like a vertical line, because the adjacent (true power) side would have zero length. The same could be said for a purely capacitive circuit. If there are no dissipative (resistive) components in the circuit, then the true power must be equal to zero, making any power in the circuit purely reactive. The power triangle for a purely capacitive circuit would again be a vertical line (pointing down instead of up as it was for the purely inductive circuit). -5- Power factor can be an important aspect to consider in an AC circuit; because any power factor less than 1 means that the circuit's wiring has to carry more current than what would be necessary with zero reactance in the circuit to deliver the same amount of (true) power to the resistive load. The poor power factor makes for an inefficient power delivery system. Poor power factor can be corrected, paradoxically, by adding another load to the circuit drawing an equal and opposite amount of reactive power, to cancel out the effects of the load's inductive reactance. Inductive reactance can only be canceled by capacitive reactance, so we have to add a capacitor in parallel to our example circuit as the additional load. The effect of these two opposing reactances in parallel is to bring the circuit's total impedance equal to its total resistance (to make the impedance phase angle equal, or at least closer, to zero). [3] Power factor measures how efficiently the current is being converted into real work— with a low power factor, more electrical current is required to provide the same amount of real power. All current causes dissipation in a distribution system. These losses can be ( ) modeled as Loss = I 2 * R , where R is the resistance. A power factor of 1 will result in the most efficient loading of the supply; a load with a power factor of 0.5 will result in higher losses in the distribution system. [3] The reactive load of an industrial power system typically consists of a large number of AC induction motors. This can cause the total load to be up to 50% inductive. Large inductive loads cause the apparent power to be 25% to 41% higher than the real power. If the utility billing is based on real power (KW) only, the utility must provide up to 41% more capacity than they are billing for. Since it takes more capacity and is more expensive to serve a customer with a low power factor, that customer has to pick up the tab. Most electrical rate -6- tariffs contain provisions that include a minimum power factor. Customers who fall short of the minimum power factor level receive a power factor charge. Power factor charges may range from $5 to thousands of dollars per month. [2] Overall there are several consequences of a low power factor; these consequences include decreased system capacity, increased system losses, and extra cost. Benefits of increasing a low power factor include eliminated or reduced power factor charges on utility bills, more efficient operations with increased capacity and reduced current draw. Chapter IV IV – Methods of Power Factor Correction In the real world, utilities normally only require a power factor of 0.9. Although a unity power factor provides the most efficient power system, a unity power factor leaves the power system susceptible to harmonic problems. Harmonic problems cause excessive heating in motors, nuisance tripping, and premature failure of solid state components. Power factor correction (PFC) is usually achieved by adding capacitive load to offset the inductive load present in the power system. The power factor of the power system is constantly changing due to variations in the size and number of the motors being used at one time. This makes it difficult to balance the inductive and capacitive loads continuously. In addition, harmonic problems can be introduced if the capacitors are not sized with the specific power system characteristics in mind. The utility company may also restrict or deny the introduction of KVARs into their power system. These are all considerations that need to be addressed prior to making any decisions about the size or type of power factor correction. -7- Figure 6: Power Triangle illustrating effects of capacitor PFC The most inexpensive and widely used method of correcting the power factor is through the use of one fixed capacitor bank connected to the incoming transformer or switchgear bus. The fixed capacitor bank is sized to regulate a 0.9 power factor during maximum operational inductive loading. This means that during periods of operation where less than maximum inductive loading is utilized, extra KVAR capacity will be introduced into the utility power system. The only draw backs to this method are utility restrictions and future inductive loads that change the maximum operational inductive loading. [2] A variation of the above method can be used only if a discrete number of motors are causing the power factor problems. Individual capacitors can be connected in parallel with each motor. When the motor is energized, the capacitor bank is also energized to provide power factor correction while the motor is being used (as seen in Figures 3 and 4 located on the next page). The benefit of this method is that the amount of capacitive load is regulated -8- with the amount of inductive load. The drawbacks to this method are that it may not be feasible physically or economically to have an individual capacitor for each motor, and maintenance of multiple units may be costly and difficult. [2] Another method of power factor correction is the use of a variable capacitor bank. This bank would be connected just like the fixed bank. The advantage of the variable capacitor bank is that the bank monitors the system power factor and automatically regulates the amount of capacitive load connected to the system to offset the inductive load. Since the capacitive load is regulated, there would be no conflict with the utility. The variable capacitor banks normally come with internal protection, provide space for additional banks, and provide a centrally located easily maintained unit. The draw backs to the variable capacitor bank are an increased chance of harmonic problems due to the variations in capacitance, initial cost, and maintenance costs of internal parts used for capacitor switching. [2] Figure 7: Induction motor without a capacitor in parallel -9- Figure 8: Induction motor with a capacitor in parallel A combination of the previously mentioned methods seems to be the normal configuration that is used once correction is decided upon. Normally, capacitors are connected to the largest motors to provide correction while they are running. In addition, a variable or fixed capacitor bank is connected to the main transformer or switchgear. The advantage of this is regulation of the capacitive load and a reduction in the size of the capacitor bank connected to the main transformer or switchgear. [2] It should be noted that too much capacitance in an AC circuit will result in a low power factor just as well as too much inductance. You must be careful not to over-correct when adding capacitance to an AC circuit. You must also be very careful to use the proper capacitors for the job (rated adequately for power system voltages and the occasional voltage spike from lightning strikes, for continuous AC service, and capable of handling the expected - 10 - levels of current). If a circuit is predominantly inductive, we say that its power factor is lagging (because the current wave for the circuit lags behind the applied voltage wave). Conversely, if a circuit is predominantly capacitive, we say that its power factor is leading. Thus, our example circuit started out with a power factor of 0.705 lagging, and was corrected to a power factor of 0.999 lagging. [1] All in all poor power factor in an AC circuit can be corrected to a value close to unity (1), by adding a parallel reactance opposite to the effect of the load's reactance. If the load's reactance is inductive in nature (which is almost always will be), parallel capacitance is what is needed to correct poor power factor. Chapter V – Benefits of Power Factor Correction The primary benefit of power factor correction is the elimination of charges related to reactive power-consumption. If the utility is adding a power factor penalty or billing for apparent power (KVA), reduction in reactive power will net savings. The amount of savings seen will depend on the size, configuration, and operation of the power system. Typically, the costs for correction are paid back inside of one year, and after that, the savings will reduce operating costs. In addition, power factor correction will improve the overall performance of the power system which can increase switchgear, starter, and motor life. The bottom line is protection, efficiency, and savings. Chapter VI VI – Conclusions and Future Plans Since this is the project’s first semester, there is a lot more in store. Our future plans include learning Siemens Power System Simulator for Engineering (PSS/E) and helping the fall EE461 students learn and use PSS/E. In order to learn PSS/E we will be utilizing the labs - 11 - created by the WAPA System Study Senior Design Group. In addition to the learning PSS/E our plans include a system impact study of the proposed Colorado State University Windfarm. Projects are given $50 per person per semester. Since this first semester was mostly spent doing research, we came in extremely under budget. The only real expenses were group members’ time. References 1. Lessons In Electric Circuits Volume II, Sixth Edition, Tony R. Kuphaldt, 2007 2. Power Factor Correction, Ralph A. Frye III, P.E., http://www.wagesterlease.com/aboutus/articles/powerfactor.html 3. Power Factor, L M Photonics Ltd, http://www.lmphotonics.com/pwrfact.htm?gclid=CJbHjdTMjosCFSUeGAodtRe8VQ Bibliography Power Factor Correction, Wikipedia, http://en.wikipedia.org/wiki/Power_factor_correction Power Factor Correction, How Stuff works, http://www.howstuffworks.com/ Electrical Machines, Drives, and Power Systems, Sixth Edition, Theodore Wildi, 2006 Acknowledgements Thank you to Gerald E. Hager for his time and expertise, Dr. George Collins for his continued support and the WAPA Impact Study Senior Design Group for their collaborative efforts. - 12 -


























![Sample_hold[1]](http://s1.studyres.com/store/data/008409180_1-2fb82fc5da018796019cca115ccc7534-150x150.png)