Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
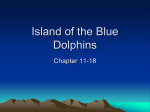
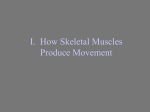
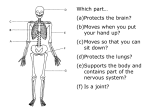
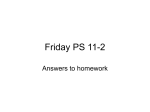
10.5005/jp-journals-10021-1156 ORIGINAL ARTICLE Pavankumar Janardan Vibhute, Usha Shenoy Rationalization of Mechanical Factors affecting Primary Stability of Orthodontic Miniscrew using Engineering Principles of Simple Machines 1 Pavankumar Janardan Vibhute, 2Usha Shenoy ABSTRACT Miniscrews have become the regular components as an anchorage source in orthodontics. Stability and failure of miniscrew is materializing to be multifactorial with no consensus on causative factors. Factors that influence the load transfer at the bone-implant interface and miniscrew stability include host factors, biomechanical factors, sterilization protocol and hygiene. Biomechanical influences on bone structure play an important role in the longevity of bone. Incorrect loading or overloading as a result of ineffective implant geometries may lead to implant loss. Miniscrews are not an exception for following the mechanical behavior or engineering principles. More certainly, they are based on the simple machines, which is a mechanical device that changes the direction or magnitude of a force. This article produces an insight for rationalization of mechanical factors controlling the stability with principles of simple machines, namely (i) lever, (ii) wheel and axle, (iii) inclined plane, (iv) wedge and (v) screw. Keywords: Implant, Miniscrew stability, Biomechanics, Simple machine, Mechanical advantage, Lever, Cortical bone. How to cite this article: Vibhute PJ, Shenoy U. Rationalization of Mechanical Factors affecting Primary Stability of Orthodontic Miniscrew using Engineering Principles of Simple Machines. J Ind Orthod Soc 2013;47(4):190-198. INTRODUCTION Temporary anchorage devices (TAD), in the form of mini- or microscrew have become regular components as an anchorage source in orthodontics.1 Multiple factors are involved in stability and failure of miniscrew with no consensus on the causative factors.2-10 Specific controlling factors that might enhance primary stability of miniscrew are not fully understood. Load transmission and resultant stress distribution are significant in determining the success or failure of an implant.11,12 Factors that influence the load transfer at the bone-implant interface and miniscrew stability include host factors, biomechanical factors, sterilization protocol and hygiene. Host factors (bone quality, quantity, attached gingiva width, soft tissue thickness, gender, age) are invariable for the particular patient and should be assessed clinically for site and miniscrew selection.13-20 Biomechanical factors related to screw (size, shape, length and pitch); insertion procedure and loading (force magnitude and vector) can be made effectual easily for reducing stresses at implant-bone interface.21-27 Incorrect loading or overloading as 1 Associate Professor, 2Professor Department of Orthodontics, Sharad Pawar Dental College, Datta Meghe Institute of Medical Sciences, Wardha, Maharashtra, India 1,2 Corresponding Author: Pavankumar Janardan Vibhute, Associate Professor, Department of Orthodontics, Sharad Pawar Dental College, Datta Meghe Institute of Medical Sciences, Swangi Wardha, Maharashtra, India, e-mail: [email protected] Received on: 12/1/12 Accepted after Revision: 19/9/12 190 a result of ineffective implant geometry may lead to implant loss. The key to successful implants is minimum bone damage, which depends on biomechanical influences on bone structure. The magnitude and direction of force applied influence the implant’s prognosis. Collectively these factors control the primary stability of orthodontic miniscrew and are important from the perspective of immediate loading. Insertion torque and pullout tests typically are used to analyze its primary stability. Both tests provide anchorage estimates for immediately loaded miniscrews. Pullout tests are commonly used to measure primary stability in orthopedics, neurosurgery and maxillofacial surgery. Pullout tests directed vertically, with forces parallel to the long axis of the screw, typically are used to evaluate the design of a screw-type implant. In orthodontics miniscrews most of time loaded approximately perpendicular to long axis, hence viability of pullout test is uncertain. Biomechanics followed in orthodontics are based on definite engineering principles and laws; miniscrews are not an exception. More certainly, they are based on the ‘classical simple machines’, the term which was defined by Renaissance scientists.28 A ‘simple machine’ is a mechanical device that changes the direction or magnitude of a force. In general, it can be defined as the simplest mechanism that uses ‘mechanical advantage’ (MA) to multiply force.29,30 A simple machine uses a single applied force to do work against a single load force. Ignoring friction losses, the work done on the load is equal to the work done by the applied force. They can be used to increase the amount of the output force, at the cost of a proportional decrease in the distance moved by the load. The ratio of the output to the input force is called the MA. This article gives an JIOS Rationalization of Mechanical Factors affecting Primary Stability of Orthodontic Miniscrew using Engineering Principles insight for rationalization of mechanical factors controlling its stability to improve its efficacy, using MA of five definite engineering principles of simple machines, namely (i) lever, (ii) wheel and axle, (iii) inclined plane, (iv) wedge and (v) screw. Work is defined as the force multiplied by the distance it moves. So the applied force (Fin), times the distance the input point moves (Din), must be equal to the load force (Fout), times the distance the load moves (Dout), (Fin–Din = Fout–Dout). So the ratio of output to input force, the MA, is the inverse ratio of distances moved: MA = Fout ÷ Fin = Din÷ Dout For an ideal (frictionless) mechanism, it is also equal to: MA = distance over which force is applied ÷ distance over which the object is moved. There are two types of MA: Fig. 1A: Beam in static equilibrium around the fulcrum Ideal Mechanical Advantage The ideal mechanical advantage (IMA), or theoretical MA, is the MA of an ideal machine. It is calculated using principles of physics, because no ideal machine actually exists. The IMA of a machine can be found with the following formula: IMA= DE ÷ DR where, DE equals the ‘effort distance’ (for a lever, the distance from the fulcrum to where the effort is applied) and DR equals the resistance distance (for a lever, the distance from the fulcrum to where the resistance is encountered). Actual Mechanical Advantage The actual mechanical advantage (AMA) is the MA of a real machine. Actual MA takes into consideration real world factors such as energy lost in friction. The AMA of a machine is calculated with the following formula: AMA = R ÷ Eactual; where, R = resistance force obtained from machine, Eactual = actual effort force. Lever Principle Class 1 lever: The fulcrum is located between the applied force and the load. Levers can be used to exert a large force over a small distance at one end by exerting only a small force over a greater distance at the other.31 The force applied (at end points of the lever) is proportional to the ratio of the length of the lever arm measured between the fulcrum (pivoting point) and application point of the force applied at each end of the lever. Mathematically, this is expressed by M = Fd, where F is the force, d is the distance between the force and the fulcrum and M is the turning force known as the moment or torque. Beam balanced around a fulcrum exhibit a MA due to the moment created by vector force ‘A’ counterclockwise (moment A × a) being in equilibrium with the moment created by vector force ‘B’ clockwise (moment B × b). The relatively low vector force ‘B’ is translated in a relatively high vector force ‘A’. The force is thus increased in the ratio of the forces A:B, which is equal to the ratio of the distances to the fulcrum b:a, this ratio is called the MA. This idealized situation does not take into account friction (Figs 1A and B). Fig. 1B: A large force over a small distance at one end balanced by exerting only a small force over a greater distance at the other (A × a = B × b) Miniscrew Insertion and Orthodontic Loading Bone is porous material with complex microstructure.32 The higher load bearing capacity of dense cortical bone (Young’s elastic modulus = 1.5 × 104 Pa) compared with the more porous trabecular bone (Young’s elastic modulus = 150 Pa) is recognized.32 Greater difference in stiffness of cortical and trabecular bone produces load reaction which is expressed using first class lever, where cortical plate of bone acts as fulcrum or pivot and miniscrew as rigid beam. Presence of cortical plate thickness of 0.5 to 2.5 mm in maxilla and mandible is reported to enough for resisting orthodontic forces of average 300 gm easily. Specific magnitude of loading force on miniscrew head outside the cortical plate (as fulcrum) is balanced by the inserted miniscrew shaft inside fulcrum. Thus, either its maintenance in static equilibrium or deflection of miniscrew is decided by the compressive force produced in the trabecular bone inside cortical plate (fulcrum). Ultimately, this force on trabecular bone (strain) is directly proportional to deflective force (stress) by threaded portion of miniscrew (which is decided by the loaded force at other side lever arm/at miniscrew head). Direct, perpendicular loading to long axis of miniscrew and stress distribution around entrenched miniscrew in bone at different situations is explained using Class 1 lever principle. A 12 mm long miniscrew is inserted through the cortical bone to four different depths and loaded perpendicular to its long axis with similar amount of force in four situations (Figs 2A to D). (i) A 6 mm (half) of screw inserted and remaining 6 mm (half) outside bone, form the equal lever arm length on both sides. A total of 250 gm of direct loading force applied on miniscrew head resisted (theoretically) with 250 gm of compressive force at inserted miniscrew tip (actually equal amount of compressive force by the bone on inserted miniscrew The Journal of Indian Orthodontic Society, October-December 2013;47(4):190-198 191 Pavankumar Janardan Vibhute, Usha Shenoy Figs 2A to D: According to lever principle, 12 mm miniscrew loaded with 250 gm perpendicular to long axis and different insertion depth exhibits the different compressive load at cortical plate (stress pattern). (A) 6 mm threaded portion inserted, (B) 8 mm threaded portion inserted, (C) 10 mm threaded portion inserted, (D) 11 mm threaded portion inserted shaft to keep the screw in static equilibrium), cortical plate act as fulcrum, thus, receiving total 500 gm of compressive load (force). (ii) Insertion of miniscrew increased up to 8 mm (twothird) inside trabecular bone and amount of applied load remain same, i.e. 250 gm direct loading force, to keep screw in equilibrium 125 gm of compressive force is necessary at inserted miniscrew tip and fulcrum receives a total 375 gm force. (iii) Further, insertion of miniscrew increased up to 10 mm and 192 amount of applied force of 250 gm, it balanced with only 50 gm of compressive force at miniscrew tip and resulting 300 gm of total load at fulcrum. (iv) In case of miniscrew inserted 11 mm inside trabecular bone with 250 gm of force on 1 mm lever arm outside cortical plate (fulcrum), only 22.7 gm of compressive force at miniscrew tip is necessary for static equilibrium and total 272.7 gm of force exerted on fulcrum. Lever arm outside cortical plate (fulcrum) is a clear distance between application point of the force on miniscrew head and cortical plate, while lever arm inside the cortical plate is being balanced by trabecular bone (distributed throughout the inserted shaft of miniscrew). Relatively low and reduced magnitude of force at miniscrew tip indicates low stresses at bone–miniscrew interface throughout inserted portion of miniscrew (Balancing force at miniscrew tip is indicative of total amount of force being produced throughout inserted miniscrew shaft). Increasing the depth of insertion of 12 mm long miniscrew from 6 to 10 mm inside bone reduces the stresses at bone–miniscrew interface by 80% (MA = 10 ÷ 2 mm = 250 ÷ 50 gm = 5). Farther the perpendicular loading point on miniscrew head from cortical plate (fulcrum) on one side (i.e. long loading lever arm), more the stresses on inserted miniscrew shaft. Excessive soft tissue thickness (which demand longer neck length, Fig. 3), incomplete miniscrew insertion, incomplete insertion due to obstruction by root, treatment planning with long superstructures on miniscrew head alter the lever arms ratio vulnerably (long loading lever arm) which cause unintended higher stress level at bone-miniscrew interface. To have the maximum MA, i.e. lowest theoretical stress at implant tip, that means eventually decreased amount of stress on inserted (embedded) portion of miniscrew, and lowest possible force on the cortical plate (fulcrum), implant should be loaded as much as close to the fulcrum (i.e. cortical plate) and it should be inserted to its full length. When there is inadequate bone depth for insertion, instead of selecting longer screw, short length miniscrew should be chosen, to avoid incomplete insertion of threaded portion of longer screw, eventually to avoid unintended excessive stress levels at miniscrew-bone interface (cortical plate). Although the risk associated with long Fig. 3: Longer neck implants (long lever arm) which cause unintended higher stress level at bone-miniscrew interface and at cortical plate JIOS Rationalization of Mechanical Factors affecting Primary Stability of Orthodontic Miniscrew using Engineering Principles miniscrew is root approximation, it may be lowered with use of best possible diagnostic record and guide for miniscrew placement.33 ‘A large force over a small distance (short loading lever arm) at one end (miniscrew head) is balanced by exerting only a small force over a greater distance (long inserted portion lever arm) at the other end’ (first class lever principle) helps to reduce the strain levels around the inserted miniscrew shaft for attaining best primary stability. Thus, length of miniscrew and its relative insertion in to bone is deciding factor from stability point of view. Cortical bone, which is considered being most important for primary stability on perpendicular loading may be explained scientifically with this principle. Wheel and Axle Principle A wheel and axle is a modified lever of the first class that rotates in a circle around a center point or fulcrum. The larger wheel (or outside) rotates around the smaller wheel (axle). A wheel is essentially a lever with one arm the distance between the axle and the outer point of the wheel, and the other the radius of the axle. Typically this is a fairly large difference, leading to a proportionately large MA. Examples are screwdrivers, doorknobs. The form of ‘lifting water from a well’ consists of a wheel that turns an axle, which turns a rope, which converts the rotational motion to linear motion for the purpose of lifting (Fig. 4). Calculating MA Ideal MA: The IMA of a wheel and axle is calculated with the following formula: IMA = Radius wheel ÷ radius axle Actual MA: The AMA of a wheel and axle is calculated with the following formula: AMA = R ÷ Eactual Where, R = resistance force, i.e. the weight of the bucket in this example. Eactual = actual effort force, the force required to turn the wheel. Miniscrew Insertion and Drivers used for Torquing (as Torque Multiplier) Torque is tendency of force to rotate an object about its axis/ fulcrum/pivot. Torque = r × f, where ‘r’ is length of lever arm (wheel/handle radius), ‘f’ is magnitude of force vector. Amount of torque required during miniscrew placement (insertion) depend on the nature of bone and design of miniscrew (size, shape, pitch and thread circumference). In the screw, which uses rotational motion, the input force is torque, and the distance is an angle that the shaft is turned. An example of the rotational form, diameter of the handle gives a MA as torque multiplier. Screw driver handle is essentially a lever with one arm (distance between axle and outer point of handle) and other the radius of the axle (miniscrew). Typically this is fairly large difference, leading to proportionately large MA. Ideal MA = Radius of screw driver handle ÷ radius of miniscrew. Actual MA = Resistance by the bone material ÷ actual force required to turn the screw driver. In the application of specific amount of torque, bigger handles reduce the total efforts for rotation of driver or applying same amount of torque. Reduction in the total efforts helps to keep control over insertion pressure required during torque placement (Fig. 5A). Insertion pressure is dependent upon the lead (amount of screw travelled in 360° rotation) and nature of bone. Nonaxial Perpendicular Loading and Primary Stability of Miniscrew Detorquing or destabilizing force on miniscrew is more easily provided with even small loading force on longer power arm of screw whose point of loading force is more away from miniscrew head and opposite to the tightening direction (Fig. 5B). Inclined Plane Principle The inclined plane is one of the original simple machines; as the name suggests, it is a flat surface whose end points are at different heights. By sliding an object up an inclined plane rather than completely vertical, the amount of force required is reduced, at the expense of increasing the distance the object must travel (Fig. 6). Fig. 4: The traditional form as recognized in 19th century textbooks, a well-known application of the wheel and axle shows one of the most widely recognized applications, i.e. lifting water from a well MA = length of slope (L) ÷ height of slope (H). E.g. The height of the ramp = 1 m, the length of the ramp = 5 m, divide 5 by 1 = 5. MA = 5. The Journal of Indian Orthodontic Society, October-December 2013;47(4):190-198 193 Pavankumar Janardan Vibhute, Usha Shenoy Fig. 5A: Bigger size of handles reduces the total efforts for rotation of driver or apply same amount of torque Fig. 7: Cross-section of a splitting wedge with its length oriented vertically. A downward force produces forces perpendicular to its inclined surfaces Fig. 5B: Perpendicular loading of miniscrew away from its head with different lever arm length. Small amount force with long lever length may cause detorquing of screw easily than the short lever and same force be used to separate two objects or portions of an object, lift an object or hold an object in place. It functions by converting a force applied to its blunt end into forces perpendicular (normal) to its inclined surfaces. The MA of a wedge is given by the ratio of the length of its slope to its width. Although a short wedge with a wide angle may do a job faster, it requires more force than a long wedge with a narrow angle (Fig. 7). The MA of a wedge can be calculated by dividing the length of the slope (S) by the wedge’s width (W) (MA = S ÷ W). The more acute, or narrow, the angle of a wedge, the greater the ratio of the length of its slope to its width, and thus the more MA it will yield (Figs 8A to C). Thickness of Cortical Plate, Pitch, Perpendicular Loading and Wedge Principle Fig. 6: Principle of inclined plane Wedge is a compound inclined plane, consisting of multiple inclined planes placed so that the planes meet at one point. The point where the planes meet is pushed into a solid or fluid substance and overcomes the resistance of materials to separate by transferring the force exerted against the material into two opposing forces normal to the faces of the wedge. Principle of compound portable inclined plane is discussed under wedge and screw. Wedge Principle A wedge is a triangular shaped tool, a compound and portable inclined plane, and one of the classical simple machines. It can 194 Thickness of the cortical bone in perpendicular loading is considered the most important for primary stability. Since maximum stresses are seen at cortical plate on perpendicular loading, the inclined planes of threads act as a wedge in cortical plate (Figs 9A and B). Primary stability may be compromised when miniscrew with a pitch of 1.25 mm is inserted into cortical bone that is only 1.5 mm thick, because of the limited space available for thread engagement. MA of greater depth threads augment cortical bone damage. Reduced depth of threads and decreased pitch reduces the mechanical damage to cortical bone. Mechanical purchase of cortical bone which has greater density requires reduced pitch and thread depth. While less dense trabecular bone requires increased thread depth and more pitch for greater purchase of bone material. JIOS Rationalization of Mechanical Factors affecting Primary Stability of Orthodontic Miniscrew using Engineering Principles Figs 8A to C: Integrity and sharpness of miniscrew tip plays an important role in traveling of miniscrew inside bone. Insertion pressure is responsive to the size, shape and integrity of this compound inclined plane. Tapered shape seems to provide greater MA than a cylindrical shape, depending upon slope length of inclined plane and width of screw Screw A screw is essentially an inclined plane wrapped helically around an axis for a number of turns. A screw can convert a rotational movement to a linear movement, and a torque (rotational force) to a linear force. When, the shaft of the screw is rotated relative to the stationary threads, the screw moves along its axis relative to the medium surrounding it.34 The Archimedean screw or the screw pump is a machine historically used for transferring water from a low-lying body of water into irrigation ditches (Figs 10A and B).35 MA of orthodontic miniscrew: The theoretical MA for a screw can be calculated using the following equation: MA = dm ÷ l; where, dm = the mean diameter of the screw thread and l = the pitch of the screw thread. From the perspective of immediate loading, primary or initial stability of miniscrew is more important in orthodontics. Figs 9A and B: Maximum stresses at cortical plate on perpendicular loading, inclined plane of threads acts as wedge in cortical plate Primary or initial stability depends upon initial torque, which in turn depend on density of bone material.21,36 The screw’s pitch, the distance the screw travels in one revolution, determines the MA of screw; the smaller the pitch, the higher the MA. Resistance encountered (by bone) during the screw placement is reduced by reducing the pitch or increasing the thread circumference. MA can be estimated by dividing the diameter (or circumference) of the shaft by the distance between the threads (Fig. 11). Actual MA of a screw system may be further increased if a screwdriver or other screw driving system has an additional MA as well. Higher level of MA is usually required for insertion in very hard material, but with bone moderate initial pressure is required to pass through cortical plate with several threads, but after that, insertion pressure should be reduced. Significantly increased pull out strength with reduced pitch is reported.37 A lesser pitch provides a greater surface area than the greater pitch, which increases torque as the result of increased friction at the bone-to-screw interface.38 This increased torque level is overcome with MA, and thus increased MA helps to increase pullout strength. The Journal of Indian Orthodontic Society, October-December 2013;47(4):190-198 195 Pavankumar Janardan Vibhute, Usha Shenoy Figs 10A and B: Archimedes’ screw was operated by hand and could raise water efficiently. Since the screw is rotated in relative stationary position instead of forcing screw itself downward, surrounding medium is raised or glided in opposite, upward direction Fig. 11: MA can be estimated by dividing the outer diameter (d) of the shaft by the distance between the threads (pitch) Torquing of Miniscrew in a Stationary Position and Primary Stability Mechanism of screw loosening (loss of initial stability) is explained by the principle of Archimedes screw. Complete insertion of miniscrew is indicated by contacting its collar to cortical plate. With further rotation of screw (shaft) around its long axis in same stationary position causes stripping of treads and loss of primary stability. This can also happen with continued torquing of screw when insertion is obstructed by roots. Like Archimedes screw principle, instead of forcing screw in to surrounding medium (bone), medium is raised or glided in opposite direction. When the mechanically anchored portion 196 Figs 12A to C: Torquing of screw in stationary position causes the bone material to glide in opposite direction along the threads, a possible cause for the loss of mechanical integrity of cortical bone, bone purchased in between threads from surrounding bone of bone between the threads is pushed/glided toward the cortical plate, it gets accumulated, the integrity of cortical bone is lost (Figs 12A to C). This phenomenon is faster with the screws having less thread circumference and more pitch distance [i.e. with the screws having less MA (more pitch), or which convert the rotational movement of screw shaft to faster linear movement of bone between threads]. Portion of bone between the threads drawn toward the cortical plate will loose its mechanical integrity from peri-implant bone, thus causing the loss of primary stability and failure. Sudden drop of insertion torque occur in same situation. JIOS Rationalization of Mechanical Factors affecting Primary Stability of Orthodontic Miniscrew using Engineering Principles More denser the bone, lesser the chance of initial instability, because more firm the attachment between peri-implant bone and bone being grabbed in between threads expected no overrotation of screw in stationary position. Insertion pressure during placement is decided by the bone density, implant’s wedging shape (tapered or cylindrical) and its synchronization with rotational movement and screw design (thread circumference, pitch). Amount of rotational movement converted to the linear distance travelled inside the bone is decided by the pitch of screw (same as followed in expansion screw, but half of the linear movement since expansion screws have mirror image thread pattern on either side of it). Pitch (Symmetrical/Asymmetrical) and Primary Stability An effect of pitch type on the primary stability of miniscrew is important. In cylindrical miniscrew with symmetrical pitch, first thread on cylindrical shaft is engaged through the cortical bone and is guided towards the trabecular bone, then, every thread on the cylindrical miniscrew shaft follows and passes through the path or crater created by the first thread, thus the topographical integrity of the bone between the every adjacent crater is maintained consistently. This integrity is of prime importance in primary stability. While in case of asymmetrical pitch, every thread does not follow the track or path created by the preceding thread. Thus, instead of a definite single path of crater, several other paths are created which were eventually not occupied by the subsequent threads, and left blank. This cause loss of mechanical integrity of bone lied in between threads, leading to cause of miniscrew failure (Figs 13A and B). CONCLUSION Learning the engineering principles based on simple machine does helps in understanding mechanical and biomechanical aspects about the screws and its anchorage application in orthodontics. REFERENCES 1. Carano A, Velo S, Leone P, Siciliani G. Clinical applications of the miniscrew anchorage system. J Clin Orthod 2005;39:9-24. 2. Kuroda S, Sugawara Y, Deguchi T, Kyung H, TakanoYamamoto T. Clinical use of miniscrew implants as orthodontic anchorage: Success rates and postoperative discomfort. Am J Orthod 2007;131:9-15. 3. Wiechmann D, Meyer U, Buchter A. Success rate of mini- and micro-implants used for orthodontic anchorage: A prospective clinical study. Clin Oral Implants Res 2007;18:263-67. 4. Wilmes B, Rademacher C, Olthoff G, Drescher D. Parameters affecting primary stability of orthodontic mini-implants. J Orofac Orthop 2006;67:162-74. 5. Motoyoshi M, Uemura M, Ono A. Factors affecting the longterm stability of orthodontic mini-implants. Am J Orthod 2010;137:588-89. 6. Mortensen MG, Buschang PH, Oliver DR, Kyung H, Behrents RG. Stability of immediately loaded 3- and 6-mm miniscrew implants in beagle dogs–a pilot study. Am J Orthod 2009;136:251-59. 7. Lim H, Eun C, Cho J, Lee K, Hwang H. Factors associated with initial stability of miniscrews for orthodontic treatment. Am J Orthod 2009;136:236-42. 8. Miyawaki S, Koyama I, Inoue M, Mishima K, Sugahara T, Takano-Yamamoto T. Factors associated with the stability of titanium screws placed in the posterior region for orthodontic anchorage. Am J Orthod 2003;124:373-78. 9. Park HS, Jeong SH, Kwon OW. Factors affecting the clinical success of screw implants used as orthodontic anchorage. Am J Orthod 2006;130:18-25. Figs 13A and B: (A) Crater formation pattern in symmetrical pitch screw, (B) crater formation pattern in asymmetrical pitch screw shows that after full depth insertion some threads lack the support from the sound bone with original mechanical integrity The Journal of Indian Orthodontic Society, October-December 2013;47(4):190-198 197 Pavankumar Janardan Vibhute, Usha Shenoy 10. Cha J, Kil J, Yoon T, Hwang C. Miniscrew stability evaluated with computerized tomography scanning. Am J Orthod 2010;137:73-79. 11. Dalstra M, Cattaneo PM, Melsen B. Load transfer of miniscrews for orthodontic anchorage. J Orthod 2004;1:53-62. 12. Büchter A, Wiechmann D, Koerdt S. Load-related implant reaction of mini-implants used for orthodontic anchorage. Clin Oral Implant Res 2005;16:473-79. 13. Deguchi T, Nasu M, Murakami K, Yabuuchi T, Kamioka H, Takano-Yamamoto T. Quantitative evaluation of cortical bone thickness with computed tomographic scanning for orthodontic implants. Am J Orthod 2006;129(6):721.e7-12. 14. Motoyoshi M, Inaba M, Ono A, Ueno S, Shimizu N. The effect of cortical bone thickness on the stability of orthodontic miniimplants and on the stress distribution in surrounding bone. Int J Oral Maxillofac Surg 2009;38:13-18. 15. Ono A, Motoyoshi M, Shimizu N. Cortical bone thickness in the buccal posterior region for orthodontic mini-implants. Int J Oral Maxillofac Surg 2008;37:334-40. 16. Park J, Cho HJ. Three-dimensional evaluation of inter-radicular spaces and cortical bone thickness for the placement and initial stability of microimplants in adults. Am J Orthod 2009;136: 314-15. 17. Asscherickx K, VandeVannet B, Wehrbein H, Sabzevar MM. Success rate of miniscrews relative to their position to adjacent roots. Eur J Orthod 2008;30: 330-35. 18. Motoyoshi M, Yoshida T, Ono A, Shimizu N. Effect of cortical bone thickness and implant placement torque on stability of orthodontic mini-implants. Int J Oral Maxillofac Implants 2007;22:779-84. 19. Lim JK, Kim WS, Kim IK, Son CY, Byun HI. Three-dimensional finite element method for stress distribution on the length and diameter of orthodontic miniscrew and cortical bone thickness. Kor J Orthod 2003;33:11-20. 20. Crismani AG, Bertl MH, Celar AG, Bantleon H, Burstone CJ. Miniscrews in orthodontic treatment: Review and analysis of published clinical trials. Am J Orthod 2010;137:108-13. 21. Lim S, Cha J, Hwang C. Insertion torque of orthodontic miniscrews according to changes in shape, diameter and length. Angle Orthod 2008;78:234-40. 22. Kido H, Schulz EE, Kumar A, Lozada J, Saha S. Implant diameter and bone density: Effect on initial stability and pullout resistance. J Oral Implantol 1997;23:163-69. 23. Wilmes B, Drescher D. Impact of insertion depth and predrilling diameter on primary stability of orthodontic mini-implants. Angle Orthod 2009;79:609-14. 198 24. Wilmes B, Ottenstreuer S, Su Y, Drescher D. Impact of implant design on primary stability of orthodontic mini-implants. J Orofac Orthop 2008;69:42-50. 25. Wilmes B, Su Y, Drescher D. Insertion angle impact on primary stability of orthodontic mini-implants. Angle Orthod 2008;78: 1065-70. 26. Poggio PM, Incorvati C, Velo S, Carano A. Safe zones: A guide for miniscrew positioning in the maxillary and mandibular arch. Angle Orthod 2006;76:191-97. 27. Pickard MB, Dechow P, Rossouw PE, Buschang PH. Effects of miniscrew orientation on implant stability and resistance to failure. Am J Orthod 2010;137:91-99. 28. Anderson, Ballantyne W. Physics for technical students: Mechanics and heat. New York, USA: McGraw Hill 1914: 112-22. 29. Paul A, Roy P, Mukherjee S. Mechanical sciences: Engineering mechanics and Strength of Materials. Prentice-Hall of India Pvt. Ltd 2005:215. 30. Asimov, Isaac. Understanding physics. New York: Barnes & Noble 1988:88. 31. Ostdiek V, Bord D. Inquiry into physics. Thompson Brooks/ Cole 2005:123. 32. Cowin SC. Bone biomechanics. Boca Raton (FL): CRC Press 1989. 33. Kuroda S, Yamada K, Deguchi T. Root proximity is a major factor for screw failure in orthodontic anchorage. Am J Orthod Dentofac Orthop 2007;131:S68-73. 34. Strizhak V, Igor P, Toivo P. Evolution of design, use, and strength calculations of screw threads and threaded joints. International Symposium on History of Machines and Mechanisms. Kluwer Academic Publishers 2004:245. 35. Kantert PJ. Manual for Archimedean screw pump. Hirthammer Verlag, 2008. 36. Motoyoshi M, Hirabayashi M, Uemura M, Shimizu N. Recommended placement torque when tightening an orthodontic mini-implant. Clin Oral Implants Res 2006;17:109-14. 37. Brinley CL, Behrents R, Kim KB, et al. Pitch and longitudinal fluting effects on the primary stability of miniscrew implants. Angle Orthod 2009;79:1156-61. 38. da Cunha HA, Francischone CE, Filho HN, de Oliveira RC. A comparison between cutting torque and resonance frequency in the assessment of primary stability and final torque capacity of standard and TiUnite single-tooth implants under immediate loading. Int J Oral Maxillofac Implants 2004;19:578-85.