Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
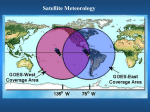
Satellite Orbits and Electro-optical Sensors Note #7.1 Satellite Orbits • If the speed of an object exceeds 7.9 kilometers per second (known as the first astronautical velocity) it would not fall but continue flying around the Earth. If the air has no friction this object will continue to orbit the Earth permanently at its original release speed, and will thus become an "artificial moon" or "artificial satellite" of the Earth. • The path followed by a satellite in space is referred to as its orbit. A satellite always moves in a fixed plane. This is called the orbital plane, and in the case of a satellite orbiting the Earth this plane always passes through the center of the Earth. The orbit of a satellite can be elliptical or circular in shape, but remote sensing satellites are usually put in circular orbits. • The plane of an orbit must pass through the Earth’s center but can be in any orientation. If its orbit is inclined at more than 45 degree to the equatorial plane then a satellite is in polar orbit. An orbit is less steeply inclined is called an equatorial orbit. • Satellite orbits are designed according to the capability and objective of the sensors they carry. Orbit selection can vary in terms of altitude and their orientation and rotation relative to the Earth. • An artificial satellite like the moon does not fall but continues to orbit the Earth because the force of the Earth's gravitational attraction is balanced by the force that is trying to escape the Earth's pull. • The law of gravity dictate that a satellite in a higher orbit travels more slowly than one in a lower orbit, and since higher orbits are longer than lower ones this means that a higherorbiting satellite takes a good deal longer to circle the Earth than a low-orbiting satellite. • The velocity of satellite can be calculated by the formula: GM v= R0 where G is the universal gravitational constant and M is the mass of the Earth. • The orbit period (p) can be determined by the formula: 2πR0 p= v • The height of a satellite above the earth’s surface can be expressed as: h = R0 − Re = R0 − 6371 • Below 180km, the Earth’s atmosphere is too dense for satellites to orbit without burning as a result of frictional heating. Above 180km there is still a small atmospheric drag on a satellite, causing its orbit to spiral downward gradually until eventually it reaches thicker atmosphere and burns. Satellite can be launched into such low orbits, but they do not last long. Above 600-800 km, there is little atmosphere drag that a satellite will remain in high orbit indefinitely. • Various forces other than atmospheric drag can perturb an orbit, such as gravitational attraction of the Sun and Moon. The drift can be compensated using jets of gas to maintain the orbit and also to control the spin of the satellite. 1 Types of Satellite Orbits • Two general classes of circular orbits are widely used for meteorological and environmental observations of the Earth: geostationary orbits and Sun-synchronous nearpolar orbits (simply referred to as polar orbits) 1) Geostationary orbits Characteristics • The geostationary satellites, at altitudes of about 36,000 km, go around the Earth at speeds which match the rotation of the Earth so they seem stationary relative to the Earth's surface. Geostationary satellites complete a orbit in 24 hours. This allows the satellites to remain over specific areas and monitor and collect information continuously and constantly. • The orbit is circular. And its inclination is zero degrees, which means that it is above the Earth's equator. • Weather and communications satellites commonly have these types of orbits. Due to their high altitude (almost three times the diameter of the earth), and some geostationary weather satellites can monitor weather and cloud patterns covering an almost entire hemisphere of the Earth. • Since the satellite does not move in relation to the Earth, it can frequently and repetitively observe and monitor the same portion of the Earth for the purpose of detecting, tracking and predicting the weather or natural hazards. • Making continuous observations over the same geographic areas permits intensive study of both daily variability and changes over longer time periods, for instance, tracking storms and hurricanes. High-temporal resolution observations from geostationary satellites are essential for monitoring short-term processes necessary to build adequate physical and dynamic modeling and parameterization in global Earth system models. Such high temporal resolution data cannot be achieved from polar or low-inclination orbits. • Ideal for making repeated observations of a fixed geographical area centered on the equator, polar areas are always covered poorly. Geostationary satellite images of the polar regions are distorted because of the low angle the satellite sees the region. Geostationary satellites in orbit • Global coverage needs a network of 5-6 geostationary satellites. • Geostationary satellites in orbit include Meteosat (ESA, covering Europe and Africa) GOES-EAST (NOAA, covering North and South America) GOES-WEST (NOAA, covering Eastern Pacific) GMS (Japan, covering Japan and Australia, Western Pacific) Fengyun-2 (China, covering China and the Indian Ocean) GOMS (Elektro) ((Russia, covering Central Asia and the Indian Ocean) INSAT (India) 2 2) Polar orbiting satellites Characteristics • Most of the remote sensing satellite platforms today are in near-polar orbits for meteorological and geophysical applications. This means that polar orbiting satellites closely parallel the earth's meridian lines. They pass over the north and south poles each revolution. • Polar orbiting satellites can provide global coverage of the atmosphere and Earth surface. Polar satellites circle at a much lower altitude (~800km) providing higher quality remote sensing data (more detailed information) than geostationary satellites. • Most satellites with near polar orbits have altitudes ranging from 600 to 800 km, with orbital periods of 98 to 102 minutes. • As the earth rotates to the east beneath the satellite, each pass monitors an area to the west of the previous pass. These 'strips' can be pieced together to produce a picture of a larger area (mosaic). • Typically, near polar orbit satellites are also designed in sun-synchronous orbits. Sun-synchonous orbits • A sun synchronous orbit means that a satellite pass over each area of the Earth’s surface at a constant local time of day called local solar time. To achieve this condition, the orbit cannot exactly follow a true north-south track to go over the poles. Actually, the orbit must be slightly tilted towards the northwest with a steep inclination angle of about 98º. This introduces a slow precession in the orbital plane westwards over the ground at a rate comparable with the Earth’s rotation, roughly one degree per day. Precession ensures that the equatorial crossing times of the satellites, in terms of the local solar time, remain nearly constant throughout the year. • With the sun synchronous orbit, at any given latitude the position of the sun in the sky as the satellite passes overhead will be the same within the same season. This ensures consistent illumination conditions when acquiring images in a specific season over successive years, or over a particular area over a series of days. This means that a satellite can make repeated global observations from a single set of sensors with similar illumination from pass to pass. This is an important factor for monitoring changes between images or for mosaicking adjacent images together, as they do not have to be corrected for different illumination conditions. • Typically, equatorial crossing times of satellites are selected to avoid early morning mists or afternoon cloud in the tropics, to take advantages of the diurnal heating and cooling cycle in thermal infrared studies, or to ensure a low sun angle that highlights topographic features. • Having a sun-synchronous orbit, however, does not mean that the solar illumination angles are constant throughout the orbit. Most obviously, the sun will generally be lower in the sky as you move northward or southward towards the poles. In addition, the local solar time will also vary during the orbit. 3 Ascending and Descending Passes • Ascending passes of the orbit corresponds to that portion of the orbit when the satellite is moving from south to north, while descending passes of the orbit corresponds to north to south movement. • Most sun-synchronous polar orbiters pass from north to south (descending passes) over the sunlit hemisphere and return from south to north (ascending passes) over the nighttime hemisphere. In other words, the ascending pass is on the shadowed side of the Earth while the descending pass is on the sunlit side. • Sensors recording reflected solar energy only image the surface on a descending pass, when solar illumination is available. Active sensors that provide their own illumination or passive sensors that record emitted radiation can also image the surface on ascending passes. Polar orbiting satellites in orbits Examples include POES, DMSP, Landsat, SPOT, IRS, etc. 3) Space Shuttles • Manned spacecraft are much heavier than unmanned ones, since they must carry lifesupport systems. • It is difficult to lift them into high orbits and expensive to put them in polar orbit. Usually their orbital inclination is about the same as the latitude of the launch site. Space shuttles fly in lower-inclination orbits (40-60º inclination). • The Space Shuttle uses a low-Earth orbit in which it travels just above Earth's atmosphere. The Space Shuttle orbits about 300 km to 500 km above Earth's surface. • Most manned missions are of short duration, which makes them unsuitable for monitoring at a fixed solar time and incapable of acquiring comprehensive cover even within the limits of their orbital inclination. • The vehicle is similar in size to a medium commercial jet airliner and accommodates a crew of up to about seven on mission that last up to 9-12 days. Manned missions tend to be used as test-beds for experimental systems. Space shuttles carry only a few instruments for highly focused studies of specific global Earth processes. • Examples include SIR-A (38º inclination, 260 km altitude), SIR-B and SIR-C/X (57º inclination, 225 km altitude), SRTM (Shuttle Radar Topography Mission, 60º inclination, 360 km altitude). • When launched, the shuttle is attached to two solid-propellant rockets, plus a large liquidfuel tank that feeds the three engines. Shortly after launch the solid-propellant rockets are expended and return on parachutes to the ocean, where they are retrieved for future use. Later the external liquid-fuel tank is jettisoned and disintegrates on reentering the atmosphere. Once the shuttle is in orbit, it maneuvers with two small rocket engines. Doors to the cargo bay are opened, and the shuttle inverted to aim remote sensing systems at the earth. When a mission is completed, the orbital maneuvering system engines fire in retrograde fashion to cause reentry and an unpowered landing. 4 Ground Swath of satellites • As a satellite revolves around the Earth, the sensor images a certain portion of the Earth's surface. The area imaged on the surface is referred to as ground swath. Imaging swaths for spaceborne sensors generally vary between tens and hundreds of kilometers wide. • As the satellite orbits the Earth from pole to pole, its east-west position wouldn't change if the Earth didn't rotate. However, as seen from the Earth, it seems that the satellite is shifting westward because the Earth is rotating (from west to east) beneath it. This apparent movement allows the satellite swath to cover a new area with each consecutive pass. • The satellite's orbit and the rotation of the Earth work together to allow complete coverage of the Earth's surface, after it has completed one complete cycle of orbits. • Since the orbital period is much less than 1 day, images of several ground tracks can be acquired within 24 hours. Satellite Repeat Cycles • If we start with any randomly selected pass in a satellite's orbit, an orbit cycle will be completed when the satellite retraces its path, passing over the same point on the Earth's surface directly below the satellite (called the nadir point) for a second time. • The exact length of time of the orbital cycle will vary with each satellite. The interval of time required for the satellite to complete its orbit cycle is not the same as the "revisit period". Using steerable sensors, a satellite-borne instrument can view an area (off-nadir) before and after the orbit passes over a target, thus making the 'revisit' time less than the orbit cycle time. • The revisit period is an important consideration for a number of monitoring applications, especially when frequent imaging is required (for example, to monitor the spread of an oil spill, or the extent of flooding). In near-polar orbits, areas at high latitudes will be imaged more frequently than the equatorial zone due to the increasing overlap in adjacent swaths as the orbit paths come closer together near the poles. Ground Receiving Stations (GRS) • Data obtained during airborne remote sensing missions can be retrieved once the aircraft lands. It can then be processed and delivered to the end user. However, data acquired from satellite platforms need to be electronically transmitted to Earth, since the satellite continues to stay in orbit during its operational lifetime. • There are three main options for transmitting data acquired by satellites to the surface. The data can be directly transmitted to Earth if a Ground Receiving Station (GRS) is in the line of sight of the satellite. If this is not the case, the data can be recorded on board the satellite for transmission to a GRS at a later time. Tape recorders use power and make the satellite heavier to launch, so not all remote-sensing satellite carry them. Data can also be relayed to the GRS through the Tracking and Data Relay Satellite System (TDRSS), which consists of a series of communications satellites in geosynchronous orbit. The data are transmitted from one satellite to another until they reach the appropriate GRS. • To send a signal directly to the ground means that the satellite has to be above the horizon as seen from a ground receiving station. At a typical orbit height, the satellite has to be within about 3000km masks (coverage circles) of the station. In high latitude area, 5 GRS will be visited by satellite more frequently as the orbit paths converge near the poles. For example, Cantley (near Ottawa), Prince Albert (in Saskatchewan) Ground Receiving Stations in Canada, Alaska SAR facility in Fairbanks in the US. Other ground stations have been set up around the world to capture data from a variety of satellites. Remote Sensing Systems • Two major categories: framing system and scanning system. • Framing systems instantaneously acquire an image of a large area (or frame) on the terrain. Cameras and vidicons are common examples of such systems. • A scanning system employs a single detector with a narrow field of view that is swept across the terrain in a series of parallel scan lines to produce an image. Electro-optical Sensors • Electro-optical sensors use non-film detectors. In contrast, photographic cameras record radiation reflected from a ground scene directly onto film. • Electro-optical detectors record the reflected and/or emitted radiation from a ground scene as analog electrical signals, which are converted into the image DN values. Electro-optical Sensors versus Photographic Cameras • Electro-optical sensors generally have poorer spatial resolution than photographic cameras • The spectral range of photographic systems is restricted to the visible and near-infrared regions while electro-optical sensors can extend this range into mid infrared and thermal infrared. They are also capable of much higher spectral resolution than photographic films. • Photographic systems record the energy detected by means of a photochemical process that is difficult to measure and to make consistent. Because electro-optical sensors record data electronically, it is easier to determine the specific amount of energy measured. They can record over a greater range of values in a digital format. • Photographic systems require a continuous supply of film and processing on the ground after the photos have been taken. The digital recording with electro-optical sensors facilitates transmission of data to receiving stations on the ground and immediate processing of data in a computer environment. Types of electro-optical sensors 1) Video cameras • Although coarser in spatial resolution than traditional photography, video cameras provide a useful means of acquiring timely and inexpensive data and vocally annotated imagery. Applications with these requirements include natural disaster management, (fires, flooding), crop and disease assessment, environmental hazard control, and police surveillance. • Cameras used for video recording measure radiation in the visible, near infrared, and sometimes mid-infrared portions of the EM spectrum. The image data are recorded onto cassette, and can be viewed immediately. 2) Vidicon cameras • Vidicon cameras are a type of television camera that records the image on a photosensitive electronically charged surface (vidicon). As in a photographic camera, radiation is gathered by a lens system, passed through various filters and focused on a flat target. Instead of a photosensitive emulsion, a vidicon target is coated with a transparent 6 • • • • photoconductive material. The electrical conductivity of the target increases with the intensity of the illuminating radiation. An image is built up by scanning the target with an electron beam, which methodically sweeps the area of the target as a series of lines. A color imaging system involves three vidicons with different filters. Return Beam Vidicon (RBV) was operated on Landsat 1 & 2, 3, creating television-like images: RBV Waelength Resolution 1 0.475-0.575um (green) 80m 2 0.580-0.680um (red) 80m 3 0.690-0.830um (near IR) 80m Also used in space programs such as moon and mars 3) Scanner • Many electro-optical remote sensors acquire data using scanning systems, which employ a sensor with a narrow field of view (i.e. IFOV) that sweeps over the terrain with the motion of the platform to build up and produce a two-dimensional image of the surface. • Scanners are different from cameras that are framing systems and acquire a nearinstantaneous "snapshot" of an area of the surface. • Scanning systems can be used on both aircraft and satellite platforms and have essentially the same operating principles. • A scanning system used to collect data over a variety of different wavelength ranges is called a multispectral scanner (MSS), and is the most commonly used scanning system. • There are two main modes of scanning employed to acquire multispectral image data across-track scanning, and along-track scanning. Across-track (whiskbroom) scanners • Using a rotating mirror, this system scan the terrain along scan lines that are perpendicular to the direction of motion of the sensor platform (i.e. across the swath). This allows the scanner to repeatedly measure the energy from one side of the satellite platform to the other; • As the platform moves forward over the Earth, successive scans build up a twodimensional image of the Earth’s surface. • A direct grating is used to separate thermal and non thermal energy, and a prism (or diffraction grating) is used to splits the non-termal energy into continuous of UV, visible, and near infrared wavelength components; A bank of internal detectors, each sensitive to a specific range of wavelengths, detects and measures the energy for each spectral band and then, as an electrical signal, they are converted to digital data and recorded for subsequent computer processing. • An array of electro-optical detectors are located on the focal plane; The system’s IFOV (instantaneous field of view) and flight height determine the ground spatial resolution. • The angular field of view is the sweep of the mirror, measured in degrees, used to record a scan line, and determines the width of the imaged swath. • Across-track scanner can be mounted on both aircrafts and satellites. Airborne scanners typically sweep large angles (between 90° and 120°), while satellites, because of their higher altitude need only to sweep fairly small angles (10-20°) to cover a broad region. 7 • Because the distance from the sensor to the target increases towards the edges of the swath, the ground resolution cells also become systematically larger and introduce geometric distortions to the images. • Also, the length of time the IFOV sees (dwells) a ground resolution cell as the rotating mirror scans (called the dwell time), is generally quite short and influences the design of the spatial, spectral, and radiometric resolution of the sensor. Ground Resolution Cell Size (D) • The diameter of the circular ground area viewed by the sensor at nadir is function of the instantaneous field view (IFOV) β of the sanner measured in milliradians (mrad) and the altitude of the scanner above-ground level H: D = Hβ • As the scanner’s instanenous field view moves away from nadir on either side, the circle becomes an ellipsoid. The size of the ground resolution cell increases as the scan angle increase away from nadir. • The average diameter Dφ of the elliptical resolution cell at the scanning angle φ off-nadir in the direction of the line of flight: Dφ = (H ⋅ sec φ ) ⋅ β • The average diameter Dφ of the elliptical resolution cell at the scanning angle φ off-nadir in the perpendicular scanning direction: Dφ = ( H ⋅ sec 2 φ ) ⋅ β IFOV • Solid angle through which a detector is sensitive to radiation; • Both the physical size of the sensitive element of the detector and the effective focal length of the scanner optics determine the IFOV.; Tangential Scale Distortion • The variation of the ground resolution across track causes tangential scale distortion. • The great the distance of the ground resolution cell from nadir, the greater the image scale compression. Objects near nadir exhibit their proper shape, but the objects near the edge of the image become compressed and their shape distorted. One-dimentional Relief Displacement • Truly vertical aerial photographs have a single principal point directly beneath the aircraft at nadir at the instant of exposure. This perspective geometry causes all objects that rise above the local terrain elevation to be displaced from their proper planimetric position radially outward from the principal point. • An across-track scanning system also contains relief displacement. However, instead of being radial from a single principal point, the displacement takes place in a direction that is perpendicular to the flightline for each and every scan line. In effect, the ground resolution element at the nadir function like a principal point for each scan line. • The greater the height of the object and the greater the dstance of the top of the object from nadir, the greater the amount of one-dimentional relief displacement present. Angular field of view • Angle subtended by lines from a remote sensing system to the outer margins of the strip of the terrain that is imaged by the system. Ground Swath Width 8 • • The width of the terrain strip covered by the image. The angular field of view and the altitude of the system determine the ground swath: θ swath = 2 tan( ) H 2 S/N Ratio • To produce a sharp and reliable image, the sensor must receive sufficient power of radiation energy within the IFOV. The strength of the signal can be measured by the signal-to-noise ratio. • Signal-to-noise ratio at a particular wavelength is affected by following variables: ( S / N ) λ = Qλ × I 2 × ∆λ × E λ × t 1) Quality of the detector at that wavelength (Q) 2) Size of IFOV (I) 3) Width of the waveband being detected 4) Spectral radiant flux of the surface 5) Dwell time taken to sweep the portion of surface corresponding to a pixel (t): • Increasing IFOV (coarsening the spatial resolution), widening the waveband, or increasing the time over which energy is collected for each pixel (slowing the scan speed of the mirror and the velocity of the platform), can increase the S/N ratio. Clearly there are trade-offs in trying to improve spatial and spectral resolution while keeping an acceptable S/N. Along-track (pushbroom) scanners • There is no rotating scanning mirror. Instead, a linear array of detectors located at the focal plane of the image scan along the flight track direction. These systems are also referred to as pushbroom scanners, as the motion of the detector array is analogous to the bristles of a broom being pushed along a floor. • Linear arrays consists of numerous charge-coupled devices CCDs. Each individual detector measures the energy for a single ground resolution cell along any given scan line and thus the size and IFOV of the detectors determines the spatial resolution of the system. • A separate linear array is required to measure each spectral band or channel. For each scan line, the energy detected by each detector of each linear array is sampled electronically and recorded digitally. The linear array also uses the forward motion of the platform to record successive scan lines and build up a two-dimensional image, perpendicular to the flight direction. Advantages and Disadvantages of Along-track Scanner • Along-track scanners with linear arrays have several advantages over across-track mirror scanners. The array of detectors combined with the pushbroom motion allows each detector to "see" and measure the energy from each ground resolution cell for a longer period of time (dwell time). This allows more energy to be detected and improves the radiometric resolution. The increased dwell time also facilitates smaller IFOVs and narrower bandwidths for each detector. Thus, finer spatial and spectral resolution can be achieved without impacting radiometric resolution. 9 • • • The geometric integrity of linear array system of along-track scanner is greater than across-track scanning system that has a changing IFOV across the scanning line. Because along-track scanning system has no moving parts (rotating mirror), it is generally smaller, lighter and requires less power. Hence, it is more reliable and has longer life expectancy. Disadvantage of the along-track scanner is the need of cross-calibrating thousands of detectors to achieve uniform sensitivity across the array and relatively limited range of spectral sensitivity of CCD. Hyperspectral Scanner • Also known as imaging spectrometers. • Acquire data in many, very narrow, contiguous spectral bands (visible, near IR, mid IR, thermal IR regions) • Helps to discriminate features that have diagnostic absorption & reflection characteristics lost within coarse bandwidths of conventional MSS. • May have more than 200 bands; • Special analysis tool is required for hyper-spectral data: 1) View the hyperspectral data as a 3D cube; 2) Match spectral reflectance curve for each pixel to libraries of laboratory spectra for various minerals; 3) Look for unique absorption (valley) characteristics of various materials; 4) Look for features such as number of low points in a curve their wavelength location, width, depth & symmetry. Reading Assignment: Chapter 7 in Jensen, J.R. 2000. Remote Sensing of the Environment: An Earth Resource Perspective. Upper Saddle River, NJ, Prentice Hall. 544 pp. 10