Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
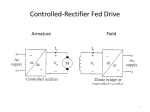
Automatic Control Systems Lecture- DC Motor Modelling and Control Emam Fathy Department of Electrical and Control Engineering email: [email protected] http://www.aast.edu/cv.php?disp_unit=346&ser=68525 1 D.C Drives • Speed control can be achieved using DC drives in a number of ways. • Variable Voltage can be applied to the armature terminals of the DC motor . • Another method is to vary the flux per pole of the motor. • The first method involve adjusting the motor’s armature while the latter method involves adjusting the motor field. These methods are referred to as “armature control” and “field control.” 2 Armature Controlled D.C Motor Ra La B ia u eb T J System constants ea = armature voltage eb = back emf Ra = armature winding resistance La = armature winding inductance ia = armature winding current Kb = back emf constant Kt = motor torque constant Jm = moment of inertia of the motor Bm=viscous-friction coefficients of the motor JL = moment of inertia of the load BL = viscous friction coefficient of the load N1/N2 = gear ratio Armature Controlled D.C Motor Ra Input: voltage u Output: Angular velocity La B u ia eb T J Electrical Subsystem dia u R a i a La eb , dt eb back-emf voltage Mechanical Subsystem Tmotor Jω Bω Armature Controlled D.C Motor Ra La Power Transformation: Torque-Current: Tm otor K t ia Voltage-Speed: B u ia eb T J eb K b ω Kt: torque constant, Kb: velocity constant For an ideal motor Kt Kb The previous equations result in the following mathematical model: di a Ra i a K b ω u La dt Jω B K t i a 0 Armature Controlled D.C Motor Taking Laplace transform of the system’s differential equations with zero initial conditions gives: La s Ra I a (s) K b Ω(s) U(s) Js B Ω(s)-K t I a (s) 0 Eliminating Ia yields the input-output transfer function Kt Ω(s) 2 U(s) La Js JRa BLa s BRa K t K b Armature Controlled D.C Motor Reduced Order Model Assuming small inductance, La 0 K t Ra Ω(s) U(s) Js B K t K b Ra Armature Controlled D.C Motor If output of the D.C motor is angular position θ then: Ra d dt or La B ( s ) s ( s ) u ia eb J T θ Which yields the following transfer function K t Ra U(s) sJs B K t K b (s) Ra Example • Assume the following values for the physical parameters. – – – – – – – – moment of inertia of the rotor (J) = 0.01 kg.m^2/s^2 damping ratio of the mechanical system (B) = 0.1 Nms electromotive force constant (K=Kb=Kt) = 0.01 Nm/Amp electric resistance (Ra) = 1 ohm electric inductance (La) = 0.5 H input (U): Source Voltage output (theta): position of shaft The rotor and shaft are assumed to be rigid 10 Design requirements • The uncompensated motor can rotate at 0.1 rad/sec with an input voltage of 1. • For the unit step input , then the motor speed output should have: – Settling time less than 2 seconds – Overshoot less than 5% – Steady-state error less than 1% 11 Uncompensated System 12 Uncompensated System From the plot, when 1 volt is applied to the system; the motor can achieve: maximum speed of 0.1 rad/sec, ten times smaller than our desired speed. it takes the motor 3 seconds to reach its steady-state speed; this does not satisfy the 2 seconds settling time criterion. 13 Example An armature controlled D.C motor runs at 5000 rpm when 15v applied at the armature circuit. Armature resistance of the motor is 0.2 Ω, armature inductance is negligible, back emf constant is 5.5x10-2 v sec/rad, motor torque constant is 6x10-5, moment of inertia of motor 10-5, viscous friction coefficient is negligible, moment of inertia of load is 4.4x10-3, viscous friction coefficient of load is 4x10-2. La Ra ea 15 v ia N1 Bm eb T Jm BL JL N2 L 1. Drive the overall transfer function of the system i.e. ΩL(s)/ Ea(s) 2. Determine the gear ratio such that the rotational speed of the load is reduced to half and torque is doubled. System constants ea = armature voltage eb = back emf Ra = armature winding resistance = 0.2 Ω La = armature winding inductance = negligible ia = armature winding current Kb = back emf constant = 5.5x10-2 volt-sec/rad Kt = motor torque constant = 6x10-5 N-m/ampere Jm = moment of inertia of the motor = 1x10-5 kg-m2 Bm=viscous-friction coefficients of the motor = negligible JL = moment of inertia of the load = 4.4x10-3 kgm2 BL = viscous friction coefficient of the load = 4x10-2 N-m/rad/sec gear ratio = N1/N2 Example Since armature inductance is negligible therefore reduced order transfer function of the motor is used. Kt ΩL(s) U(s) J eq Ra Beq La s Beq Ra K t K b La Ra ea 15 v ia N1 Bm eb T Jm BL JL N2 2 N J eq J m 1 J L N2 L 2 N Beq Bm 1 BL N2 Example 2 A field controlled D.C motor runs at 10000 rpm when 15v applied at the field circuit. Filed resistance of the motor is 0.25 Ω, Filed inductance is 0.1 H, motor torque constant is 1x10-4, moment of inertia of motor 10-5, viscous friction coefficient is 0.003, moment of inertia of load is 4.4x10-3, viscous friction coefficient of load is 4x10-2. Ra Rf ef if Lf La ea Tm Bm ωm N1 Jm BL JL N2 L 1. Drive the overall transfer function of the system i.e. ΩL(s)/ Ef(s) 2. Determine the gear ratio such that the rotational speed of the load is reduced to 500 rpm. Example 2 + + e kp r _ La Ra + ea _ N1 + ia JM BM T eb _ BL θ JL N2 - if = Constant c Numerical Values for System constants r = angular displacement of the reference input shaft c = angular displacement of the output shaft θ = angular displacement of the motor shaft K1 = gain of the potentiometer shaft = 24/π Kp = amplifier gain = 10 ea = armature voltage eb = back emf Ra = armature winding resistance = 0.2 Ω La = armature winding inductance = negligible ia = armature winding current Kb = back emf constant = 5.5x10-2 volt-sec/rad K = motor torque constant = 6x10-5 N-m/ampere Jm = moment of inertia of the motor = 1x10-5 kg-m2 Bm=viscous-friction coefficients of the motor = negligible JL = moment of inertia of the load = 4.4x10-3 kgm2 BL = viscous friction coefficient of the load = 4x10-2 N-m/rad/sec n= gear ratio = N1/N2 = 1/10 System Equations e(t)=K1[ r(t) - c(t) ] or E(S)=K1 [ R(S) - C(S) ] (1) Ea(s)=Kp E(S) (2) Transfer function of the armature controlled D.C motor Is given by θ(S) Ea(S) = Km S(TmS+1) System Equations (contd…..) Where K Km = RaBeq+KKb And Tm RaJeq = RaBeq+KKb Also Jeq=Jm+(N1/N2)2JL Beq=Bm+(N1/N2)2BL