Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Friction-plate electromagnetic couplings wikipedia , lookup
Electromotive force wikipedia , lookup
History of electromagnetic theory wikipedia , lookup
Superconducting magnet wikipedia , lookup
Induction heater wikipedia , lookup
Insulator (electricity) wikipedia , lookup
Electricity wikipedia , lookup
Three-phase electric power wikipedia , lookup
History of electrochemistry wikipedia , lookup
High voltage wikipedia , lookup
Commutator (electric) wikipedia , lookup
History of electric power transmission wikipedia , lookup
Mains electricity wikipedia , lookup
Electrical injury wikipedia , lookup
Alternating current wikipedia , lookup
Electric machine wikipedia , lookup
Electrification wikipedia , lookup
Electric motor wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Pulse-width modulation wikipedia , lookup
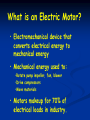
Electric Motors What is an Electric Motor? • Electromechanical device that converts electrical energy to mechanical energy • Mechanical energy used to: • Rotate pump impeller, fan, blower • Drive compressors • Move materials • Motors makeup for 70% of electrical loads in industry. Electric Motor • • • • An electromagnet is the basis of an electric motor An electric motor is all about magnets and magnetism: A motor uses magnets to create motion. Opposites attract and likes repel. Inside an electric motor, these attracting and repelling forces create rotational motion. A motor is consist of two magnets. Electric Motor Motors are powered by a source of electricity – either AC or DC. Types of Motors □ □ □ □ AC DC DC DC motors motors servo motors Stepper motors Heavy Industrial applications: AC motors Mobile robotics & hobby robots: DC motor, DC servo motor, and DC stepper motors DC Motor Characteristics When power is applied, DC motors turn in one direction at a fixed speed. They are optimized to run at a fixed, usually high RPM. Torque is highest at the rated speed and lowest at low speeds. Speed can be varied if a (pulse width modulation) PWM controller is added. DC Motor Characteristics Almost all can be reversed. Inexpensive and commonly available. Available in wide range of speeds and power. Suitable for turning, spinning, etc. DC Motor Characteristics Not suitable for positioning unless some kind of position feedback is added. If the applied load is greater than the capacity of the motor, the motor will stall and possibly burn out. DC Electric Motors DC Electric Motors use Direct Current (DC) sources of electricity: • Batteries DC Electric Motors DC Electric Motors use Direct Current (DC) sources of electricity: • • Batteries DC Power supply How DC Motors Work Electrical current flowing in a loop of wire will produce a magnetic field across the loop. When this loop is surrounded by the field of another magnet, the loop will turn, producing a force (called torque) that results in mechanical motion. Parts of the Motor Armature or rotor Axle (Shaft) Electromagnets (coiled wires) Commutator Brushes Stator (Field Magnets) DC power supply of some sort Armature The armature is an electromagnet made by coiling thin wire around two or more poles of a metal core. Electromagnets Axle Commutator Parts of the Motor Motor Control Controlling DC Motor Speed The voltage supplied to a DC motor controls its speed. Switch open Switch closed Pulse-width modulation (PWM) • Pulse-width modulation (PWM) is used to simulate a variable DC supply voltage. • PWM is a common technique for supplying variable power levels to “slow” electrical devices such as resistive loads, LEDs, and DC motors Pulse-width modulation (PWM) A pulse-width modulated signal is a rectangular waveform with a varying duty cycle. A duty cycle is the cycle of operation of a motor that operates intermittently rather than continuously. Duty cycle is expressed as a percentage. Pulse-width modulation (PWM) A longer duty cycle means the voltage is on for longer and the average voltage applied to the motor is higher and vice versa. A average voltage can be calculated by finding the product of the working voltage and the duty cycle. Average Voltage ? 𝟓𝑽 × 𝟎 = 𝟎𝑽 𝟓𝑽 × . 𝟐𝟓 = 𝟏. 𝟐𝟓𝑽 𝟓𝑽 × . 𝟓𝟎 = 𝟐. 𝟓𝑽 𝟓𝑽 × . 𝟕𝟓 = 𝟑. 𝟕𝟓𝑽 𝟓𝑽 × 𝟏 = 𝟓𝑽 roboRIO FRC PWM (outputs) 6V + – END