Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
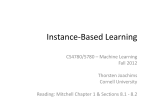
Behavioral Ecology doi:10.1093/beheco/arj060 Advance Access publication 24 March 2006 Toward an individual-level understanding of vigilance: the role of social information Andrew L. Jackson and Graeme D. Ruxton Department of Environmental and Evolutionary Biology, Institute of Biomedical and Life Sciences, University of Glasgow, Glasgow G12 8QQ, UK A gregarious lifestyle affords the benefit of collective detection of predators through the many-eyes effect. Studies of vigilance are generally concerned with exploring the relationship between vigilance rates and group size. However, a mechanistic understanding of the rules individual animals use to achieve this group-level behavior is lacking. Building on a previous modeling approach, we suggest that individuals reconcile their own private information against the social information they receive from their group mates in order to decide whether to feed or be vigilant at any one time. We present a novel modeling approach utilizing a Markov chain Monte Carlo process to describe the transition between vigilant and nonvigilant states. Many of our assumptions are based qualitatively on recently published experimental observations. We vary the amount of social information and the fidelity with which individuals process this information and show that this has a profound effect on the individual vigilance rate, the individual vigilant bout length, and the proportion of vigilant individuals at any one time. A wide range of group-level vigilance patterns can be obtained by varying simple behavioral characteristics of individual animals. We find that generally, increasing the amount of, and sensitivity to, social information generates a more cooperative vigilance behavior. This model potentially provides a theoretical and conceptual framework for examining specific real-life systems. We propose analyzing individual-based data from real animals by considering their group to be a connected network of individuals, with information transfer between them. Key words: collective behavior, computational model, group living, information transfer, network. [Behav Ecol 17:532–538 (2006)] he link between group living and antipredator benefits is a long-standing and fundamental area of ecological research (Pulliam 1973; Krause and Ruxton 2002). These benefits are focused around three main factors: 1) dilution of risk (Dehn 1990), 2) confusion effect (Milinksi 1990), and 3) collective detection (or many-eyes effect, Treherne and Foster 1980; Lima and Zollner 1996). It is the latter concept of collective detection that we are concerned with in this paper; specifically, how the amount of time spent vigilant for predators (an activity often referred to as ‘‘scanning’’) is traded off against the amount of time spent performing other essential tasks such as feeding. Generally, research in this field has focused on finding evidence for the prediction that individual vigilance should decline with increasing group size (Cresswell 1994; Lima and Zollner 1996; Roberts 1996; Bednekoff and Lima 1998; Beauchamp 2001)—for the most part with some success. Given that individuals in groups likely respond to changes in their internal state and to external stimuli, individual-based studies are required to explore the mechanisms underlying collective, group-level behaviors. Carefully designed experimental approaches such as that presented by Fernández-Juricic and Kacelnik (2004) are yielding instructive empirical findings. Similarly, ground-up or forward-engineering approaches have already demonstrated their ability to elucidate the fundamental and minimum set of rules/interactions required to generate collective behavior in ant-trail organization (Couzin and Franks 2003) and fish shoaling (Aoki 1982; Couzin et al. 2002). Vigilance has not been entirely neglected in this regard: Bahr and Bekoff (1999) provided a foundation model built around a cellular automaton where each individual T Address correspondence to A.L. Jackson who is now at Medical Research Council Social and Public Health Sciences Unit, 4 Lilybank Gardens, Glasgow G12 8RZ, UK. E-mail: [email protected]. Received 4 May 2005; revised 13 February 2006; accepted 20 February 2006. The Author 2006. Published by Oxford University Press on behalf of the International Society for Behavioral Ecology. All rights reserved. For permissions, please e-mail: [email protected] tended to do the opposite of that of its immediate neighbors. Their model makes simplifying assumptions about how individuals interact with one another and shows how a group-level (collective) vigilance behavior can be achieved through sets of local interactions governing the behavior of individuals. The key assumption underlying their model centered around individuals’ abilities to determine what state their immediate neighbors were in (feeding or vigilant); moreover, it required that they be able to count (to a greater or lesser extent) how many of their neighbors were in each state. Although Beauchamp (2002) and Lima and Zollner (1996) failed to find evidence for such monitoring of one’s neighbors in finches and dark-eyed juncos, respectively, recent work by FernándezJuricic and Kacelnik (2004) on starlings provides much promise. Their work suggests that not only do flocking starlings pay attention to their neighbors’ behavioral states but also that ‘‘. . .this response intensified with the number of conspecifics displaying a certain behaviour’’ and that responsiveness diminished with increasing distance between individuals—compelling evidence that group-level vigilance is affected, if not driven, by sets of overlapping local interactions between individual members (much like the fish-shoaling models of Aoki 1982; Couzin et al. 2002). Furthermore, several studies of primates have shown that proximity to neighbors affects individuals’ behavior (reviewed in Treves 2000), although it is less clear from these studies whether individuals are actually paying attention to the behavioral states of their neighbors or simply their presence. Our model builds on the fundamental concepts introduced by Bahr and Bekoff (1999), specifically that individuals tend to adopt the behavior opposite to that of the majority of their neighbors and that the overall behavior of the group is built from simple interactions between neighboring individuals. We make some fundamental developments to their more strategic model in order to introduce a higher level of biological realism by incorporating the key findings of Fernández-Juricic and Kacelnik (2004). Individuals in our model are not restricted to Jackson and Ruxton • Social information and vigilance nodes on a grid lattice, rather they are located randomly in space. We explore the effect of increasing the distance over which individuals draw influence from their group mates in contrast to just inspecting their immediate neighbors. When deciding whether or not to feed or be vigilant, individuals reconcile their own tendency (private information) to be vigilant for a nominal period of the time against the tendency to do the opposite of the majority of their neighbors (social information). We introduce a sensitivity function that alters the ability of individuals to process the social information they receive from their neighbors. We show that increasing the amount of and accuracy with which individuals can utilize social information leads to a greater degree of cooperation between individuals. We describe how the mean individual vigilant bout length, mean individual proportion of time spent vigilant, and proportion of vigilant individuals per unit time are affected by the rate at which feeding individuals inspect their neighbors, how many neighbors they draw inference from, and with what degree of accuracy they can process this information. MODEL DESCRIPTION N ¼ 500 individuals are allocated a random position within a square area of 5000 units2 (side length therefore is 70.71 units). Each individual in the group is stationary and cannot move about the group. At any one time, each individual occupies one of two mutually exclusive states, namely, vigilant (equates to scanning) or feeding. Individuals are independently assigned to one or other of these states randomly, each with 50% probability at the start of each simulation. The group is modeled in a toroidal manner with periodic boundary conditions such that opposite sides of the group are wrapped and the distances between individuals adjusted accordingly. This arrangement essentially allows us to consider our results as being a representative section of a larger group with no edge-related effects. During the course of the simulation, individuals switch between feeding and being vigilant. The process of switching between these states is modeled as a Markov chain Monte Carlo (MCMC) process. Only one individual is allowed to switch state at any one time, and time between switching events is calculated using the standard theory of stochastic processes (Grimmett and Welsh 1986). The rate of switching is determined analytically from an individual’s current state (private information) and also the current state of its neighbors (social information). In the most simple case, individuals will feed if the majority of individuals in the group are vigilant and will be vigilant if the majority of individuals in the group are feeding. However, two factors limit an individual’s ability to determine which state to adopt: 1) the influence of neighbors declines with distance (Fernández-Juricic and Kacelnik 2004) and 2) individuals are limited in their ability to reconcile the social information they receive from neighbors when deciding whether to be vigilant or feed. 1. Influence declines with distance between individuals As suggested by the field observations of Fernández-Juricic and Kacelnik (2004), closer neighbors exert more influence on a focal individual and more distant neighbors exert little, if no influence at all. A simple declining linear function is used to calculate the ‘‘influence matrix’’ that describes how the distance between individuals (d) affects how information about other group members is weighted (there are of course alternative functions such as S shaped; however, given the generality of this paper and the lack of data on a real system, it is reasonable to adopt a linear function). Maximum influ- 533 Figure 1 The mean number of groups (filled triangle), the mean number of vigilant neighbors (open circle), and the mean group size (filled circle) as a function of the maximum detection distance for a ‘‘supergroup’’ containing 500 individuals. Results are averaged across 500 randomly drawn group arrangements using the settings described in the methods. Error bars have been omitted for clarity, and the lines connecting the data points are linear interpolations between data points and are illustrative only. ence (I ¼ 1) is felt at a distance of zero units between individuals, and this influence declines linearly toward no influence (I ¼ 0) at distance dmax. Varying dmax alters the distance over which individuals are influenced by their neighbors and also how many of its neighbors are of influence. Influence values are adjusted according to the periodic boundary conditions. It would also be possible to incorporate habitat obstruction when wiring the network. Habitat obstruction may affect the shape of the influence function or simply reduce certain connections to zero if visual contact is completely obscured. When each individual considers changing state, its desire to be vigilant (DV) and also its desire to feed (DF) are calculated: X IF ; ð1aÞ DV ¼ DF ¼ X IV ; ð1bÞ where IV and IF are the subsets of influence values for a focal individual’s vigilant and feeding neighbors, respectively. The group can therefore be viewed as a fully connected network with information transfer between individuals. The connections between the nodes (individuals) are weighted such that they are stronger for closer nodes and zero for distant nodes that are greater than dmax units apart. The network structure describing the flow of information between individuals is greatly affected by the maximum detection distance (dmax) such that what may appear to be a large single group of individuals may in fact be itself a collection of smaller isolated units. Some care must therefore be employed when interpreting both this model and indeed real systems. Figure 1 describes how group size, the number of independent groups, and the number of visible neighbors an individual has are affected by increasing the maximum detection distance. When dmax ¼ 0, the group is made up of 500 individuals (groups of size 1). Intuitively, as dmax increases, individuals have more visible neighbors, mean group size increases, and the number of independent groups decreases whereupon the overall supergroup becomes a single network entity when dmax is greater than 5 units on average. Behavioral Ecology 534 accurate information from their surroundings—an aspect Fernández-Juricic and Kacelnik (2004) rightly point to as a key feature for any model of vigilance. Low-sensitive animals can be thought of as struggling to determine which posture their neighbors are in (head up or down), as having difficulty in counting the neighbors they have, or as having a tendency to ignore the information they are receiving from their neighbors. The MCMC process Figure 2 The probability of being vigilant (PV) as a function of the difference in the desires to feed and be vigilant (jDV DF j) for the case DV . DF, for three values of sensitivity (v ¼ [0.1, 10, 100]). The high and low values used in this analysis as marked. SVF ¼ ð1 PV Þ: 1. Limits to processing social information There is good evidence from psychology experiments that animals may vary in their ability to determine either how many neighbors they have or what their neighbors are doing—limits to perception and attention, including counting, are reviewed in Shettleworth (1998). We introduce a sensitivity function to reflect the ability of an individual to determine whether or not the desire to be vigilant outweighs the desire to feed (i.e., DV DF?). The probability of being vigilant (PV) is calculated as follows: If DV DF ; Using an MCMC process avoids the problem of simultaneous updating that occurred in the Bahr and Bekoff (1999) cellular automata model—for some of the parameter space, their model adopts highly unrealistic, strongly synchronized behaviors (AL Jackson and GD Ruxton, unpublished data). Some consequences and problems associated with simultaneous updating are discussed in Ruxton (1996) and Ruxton and Saravia (1998). The rate at which each individual switches states is determined analytically in each iteration. ‘‘Vigilant’’ individuals change to the feeding state at a rate simply given by We assume that feeding individuals do not consider switching states unless they interrupt their feeding bout temporarily to inspect their neighbors: this occurs with rate J and equates to the jumpiness of feeding individuals in the model of Bahr and Bekoff (1999). Jumpiness is the propensity to break a feeding bout and consider changing state (as introduced in Bahr and Bekoff 1999) and corresponds to individuals with narrow visual fields in Fernández-Juricic et al. (2004). ‘‘Feeding’’ individuals have a rate of switching to the vigilant state given by PV ¼ 0:5 1 0:5ð1 expðv 3 jDV DF jÞÞ; ð2aÞ else, PV ¼ 1 ½0:5 1 0:5ð1 expðv 3 jDV DF jÞÞ: ð2bÞ This function means that when the difference between the desires to feed and scan are small, individuals find it difficult to tell them apart and PV / 0.5 (see Figure 2), and when the difference is great, they can easily tell them apart and PV / 1 or 0 depending on which desire is larger. The constant v in the equation alters the sensitivity of each individual: as v / 0, so individuals become insensitive and struggle to exploit the difference between the two tendencies (PV / 0.5), and as v / N, individuals become hypersensitive and are able to detect even very slight differences between the two tendencies (PV / 1 or 0). Note that the corresponding probability of feeding (PF) is PF ¼ 1 PV. We consider two values of v ¼ [0.1, 100], respectively, corresponding to low and high sensitivity—intermediate values produce results that are intermediary between those described below. This imperfect ability to determine between the desires to feed and be vigilant reflects the different abilities of individuals to draw ð3aÞ SFV ¼ JPV : ð3bÞ At the beginning of each iteration, the appropriate switching rate (SFV or SVF) is calculated for all individuals in the group. The single event that occurs in this iteration (an event being one individual switching state) is selected stochastically from all possible events: each switching event occurs with a probability proportional to each individual’s rate of switching state Si. The total event rate R is given by the sum of all the event rates R¼ NF X 1 SFV 1 NV X SVF : ð4Þ 1 Time is advanced by Dt, determined by drawing randomly from an exponential distribution with mean 1/R (Grimmett and Welsh 1986). The chosen individual then switches to the appropriate alternative state, the switching rates recalculated, the process repeated for 5000 iterations to remove any transient effect of initial conditions, and subsequently evaluated for a further 10 000 iterations during which the following results are recorded: 1) mean proportion of vigilant individuals, ! Figure 3 Three panels per box show 1) the proportion of vigilant individuals at any one time, 2) the mean individual vigilant bout length, and 3) the mean proportion of time spent vigilant. Box plots show the median and 25% and 75% interquartile ranges with outliers (1) over 4000 iterations of a single simulation. Results per panel are presented as a function of maximum detection distance (dmax). Each row represents a different combination of sensitivity (low v ¼ 0.1, high v ¼ 100) and jumpiness (low J ¼ 0.1, high J ¼ 1) as indicated. Note the different y axis scales in the bout-length plots for low jumpiness. Note also that in the bottom right panel, one individual recorded a mean vigilant bout length of 120 time units for dmax ¼ 17: the y axis has been restricted to 70 time units for clarity of the main results. Jackson and Ruxton • Social information and vigilance 535 Behavioral Ecology 536 2) mean individual vigilance bout length, and 3) mean individual proportion of time spent vigilant. This model examines a simple setup where individuals reconcile their own private information against social information they derive from their neighbors. In the extreme case, where individuals pay no attention to their neighbors—either because there are no individuals within their zone of influence (e.g., dmin ¼ 0) or because they are completely insensitive (v ¼ 0)—they essentially rely on their own private information and ignore their neighbors’ behavior. In our model, private information tends to make individuals switch from vigilant to feeding (SVF) with P ¼ 0.5 and from feeding to vigilant (SFV) with P ¼ J 3 0.5 (thus, individuals with lower values of J are inherently more likely to feed). However, as detection distance and sensitivity increases, individuals begin to draw more information, more accurately, from their neighbors. Ultimately, they tend to do the opposite of what their neighbors are doing. Although alternative behavioral rules obviously exist at least theoretically—such as private information based on food intake rates, hunger levels, a simple greater propensity to scan/feed, or alternatives to the majority rule—it is impossible to explore all these possibilities in a single analysis. We have chosen what we feel to be the salient points of such a system of vigilance, drawing guidance from studies such as Fernández-Juricic and Kacelnik (2004) and concepts from Bahr and Bekoff (1999), and explored the effect of some ecologically important parameters. The results below are for a single randomly drawn square arrangement of 500 individuals (i.e., same group structure, different behavioral parameters). The effect of maximum detection distance (dmax: x axis), jumpiness (J: panel columns), and sensitivity (v: panel rows) were investigated in this singlegroup arrangement in separate simulations. The particular architecture used resulted in a single fully connected supergroup when the detection distance dmax 5 (cf. Figure 1). Although each box plot in Figure 3 represents results obtained from a single-group architecture only (and all box plots shared this architecture), repetition using different randomly allocated results yields very similar results (certainly they are qualitatively identical). The particular architecture used herein was drawn randomly and was not chosen for any particular reason. By comparing the effect of jumpiness and sensitivity on a single-group structure, the understanding of model predictions is clearer and easier to comprehend. RESULTS In general, we find that intuitively the mean proportion of vigilant individuals and the mean proportion time spent vigilant for individuals correlate on a 1:1 basis. However, the trends observed in the variation around these means need not correlate. Furthermore, the mean vigilant bout length need not correlate with either proportion individuals vigilant or proportion time spent vigilant such that a given level of vigilance can be achieved with either several short vigilance bouts or few long ones. When feeding individuals always consider changing state (i.e., when J ¼ 1), the group tends toward a state where 50% of individuals are vigilant regardless of sensitivity (v) or maximum detection distance (dmax). Specifically, when private information dominates these jumpy individuals’ behavior (low sensitivity and small detection distances: Figure 3a), 50% of the group tend to be vigilant at any one time and there are large deviations around this tendency. However, as dmax increases, so the variance about the central tendency for 50% vigilant individuals decreases—this trend is more pronounced for highly sensitive individuals (v ¼ 100, Figure 3b). A change in the behavior of the system occurs when feeding individuals inspect their environment less frequently (i.e., when they consider breaking their feeding bout 10% of the time, J ¼ 0.1, Figure 3c,d). As expected, when individuals rely solely on private information (dmax ¼ 0), they spend approximately 10% of their time being vigilant, and there are approximately 10% of them vigilant at any one time; they also exhibit short vigilant bout lengths of approximately 2 time units (the observed values are in accordance with the analytic prediction of exponentially distributed vigilant and feeding times with mean 1/SFV ¼ 1/SVF ¼ 1/0.5 ¼ 2 time units, Grimmett and Welsh 1986). As the zone of influence of neighbors increases (dmax increases), so the proportion of vigilant individuals also increases and so too does the mean individual vigilant bout length and the mean proportion of time spent feeding. The shape of this response is affected by the sensitivity of individuals in the group. These relationships are relatively weak in low-sensitivity groups (Figure 3c) but are strong and S shaped in high-sensitivity groups (Figure 3d). The changes in behavior of the system with detection distance could and indeed are likely to be affected by the network structure of the group. As shown in Figure 1, the group is only a single fully connected system when dmax 5 and comprises several isolated subgroups for values lower than this. However, this does not explain all the observed trends as they persist above this threshold value. Furthermore, we might have expected to see sudden changes in the system’s behavior as the number of subgroups comprising the supergroup increases in large steps with detection distance. In contrast, the trends describing the effect of detection distance on the response variables are smooth (especially noticeable in Figure 3c,d), suggesting that detection distance itself is responsible for much of the changes in the system’s behavior rather than being solely due to changes in the connectivity of the group. DISCUSSION The number of vigilant individuals at any one time in a group is likely to be the important factor in determining the success of collective detection (many-eyes effect, Krause and Ruxton 2002). Purely random switching between feeding and vigilance (dmax ¼ 0, J ¼ 1), such as when individuals use only private information, produces higher variance around the central tendency for 50% vigilant individuals than when social information is incorporated into their decision (dmax . 0). Such variable collective behavior means that at times there are many more vigilant individuals than 50% and, similarly, at others there are many fewer. If we consider a hypothetical scenario and arbitrarily assume that collective detection of a would-be predator is guaranteed when 50% of individuals are vigilant (appropriate for our model), then it is in the interests of all individuals that this vigilance rate be maintained consistently over time. The variation around the central tendency indicates to what extent the individuals are cooperating in terms of their vigilance behavior. The smaller the variation, the more cooperative the group. The larger the variation, the more they are acting as independent solitary individuals with respect to the goal of achieving a collective 50% vigilance rate. By obtaining more information, more accurately from their neighbors, individuals are capable of substantially reducing the amplitude of these oscillations through better coordination of their vigilance. Although the adaptive benefits of cooperative vigilance strategies have been studied extensively, mechanistic explanations are less common (Beauchamp 2003). Previous explanations have suggested that individuals do not parasitize their group mates vigilance because personal detection of a predator provides Jackson and Ruxton • Social information and vigilance more protection than relying on secondhand information (Fitzgibbon 1989; Scheel 1993; Cresswell 1994). Feeding individuals are not likely to be able to search for and handle food while simultaneously inspecting their neighbors. Reducing individuals’ tendency to break their feeding bout (J , 1) introduces inertia into the system and generates a propensity for less than 50% vigilant individuals as more individuals end up temporarily ‘‘stuck’’ feeding while they ignore their neighbors. When individuals rely solely on private information (dmax ¼ 0), we observe that approximately 10% of individuals are vigilant at any one time and that they themselves spend approximately 10% of their time vigilant. This is as we would expect because feeding individuals only consider switching states at a rate of J ¼ 0.1. However, as these relatively inert individuals (low jumpiness) pay more attention to their neighbors with greater accuracy, social information dominates their personal tendency for feeding, and the mean proportion of vigilant individuals and the mean individual time spent vigilant increase. This rate of increase is influenced strongly by how sensitive the individuals are, such that a group of highly sensitive individuals can achieve a much greater number of vigilant members for the same detection distance as their less sensitive counterparts. The increase in the proportion of vigilant individuals is accompanied by increasing vigilant bout lengths: this is in contrast to the short vigilant bouts observed in the jumpy individuals. This suggests that some individuals are acting as long-term sentries within the group while their neighbors feed, until such a time as enough feeding individuals lookup, see that most of their neighbors are feeding, and so they take up sentry duty. This concept is further upheld by the observation that several individuals become outliers with respect to their vigilant bout length such that for low jumpiness and high sensitivity there are several individuals that are vigilant for on average more than 30 time units. Bednekoff (1997, 2001) covers sentinel behavior in more detail and shows under which circumstances it is favorable and evolutionarily stable. Although the within-flock sentry behavior we observe in our model is somewhat different from the away-from-flock sentinel behavior that he describes, the principles are similar. The key difference is that our sentries are emergent properties of our model, arising simply as a result of the dynamics of the flock, rather than requiring some level of sentinel behavior be imposed on them. Furthermore, this model’s behavior suggests some dependency on group size (AL Jackson and GD Ruxton, unpublished data). However, this effect is weak and will involve detailed analyses before we understand the mechanism behind such subtle changes in the system’s behavior. Some modification to the basic private information rule or to the rule governing social information use may be required to capture the well-described patterns of decreasing individual vigilance rates with increasing group size observed in real situations (Krause and Ruxton 2002). Our model is similar to that of Bahr and Bekoff (1999) in that we assume that individuals tend to do the opposite of that of their neighbors. This is in contrast to the findings of Fernández-Juricic and Kacelnik (2004) on starlings, which suggested a tendency for individuals to copy their neighbors. When such a copying rule is used in our model, we find that eventually all individuals end up feeding for the majority of time (indeed all the time in many cases) as long as they pay some attention to their neighbors (AL Jackson and GD Ruxton, unpublished data). Such behavior seems contrary to the concept of vigilance behavior and warrants further consideration in future studies. Perhaps, a copying rule may be favored in purely foraging situations and an opposing rule in antipredator vigilance. Indeed, it would be interesting to combine individual-based models of 537 group foraging (e.g., Beauchamp and Fernández-Juricic 2005) with those of group vigilance and allow movement of individuals in an environment containing different distributions of food. Rather than speculate about the alternatives, we feel that further experimental work will drive our knowledge and modeling in this regard. We hypothesize that the group is essentially a connected network of individuals, with individuals themselves having internal state-dependent rules governing vigilance rates, against which they reconcile the social information they yield from their neighbors. By wiring such a network from video analyses, it should be possible to reverse engineer the underlying rules by elaborating on methods employed in, for example, Fernández-Juricic and Kacelnik (2004). Hidden MCMC approaches may provide a means to obtain the switching rates individuals follow for moving between states (Durbin et al. 1998). The input into such models would be the observed sequence of vigilance/feeding states adopted, and the output would be estimates of the unknown probabilities of moving between the states. Modeling vigilance as we have done opens up a range of avenues of research. Introducing a predator to the system would allow us to explore information sharing between individuals regarding predator detection, using concepts such as the Trafalgar effect (Treherne and Foster 1981). Position adopted within the group will also be interesting to pursue as it is often associated with differential costs and benefits (Krause and Ruxton 2002) and often with different rates of vigilance (Terhune and Brillant 1996; Rattenborg et al. 1999; de Oliveira et al. 2003; Randler 2003). Indeed, analyses of single-simulation runs (AL Jackson and GD Ruxton, unpublished data) suggest that the different influences felt by individuals in different locations within the group affects their feeding–vigilant switching rates, suggesting that an effect of group size, density, or shape as well as heterogeneity of position within a group will alter the system’s behavior. It is also clear from our analyses that it is important to bear in mind the connectivity of the entire group as it may in fact be a collection of several smaller independent groups rather than a single entity. Elucidating the underlying individual-level mechanisms that drive collective vigilance behavior will be challenging for both theoreticians and experimentalists alike—as analogous complex molecular networks are proving (Nicholson et al. 2004). A combination of forward- and reverse-engineering approaches (e.g., Bahr and Bekoff 1999 and Fernández-Juricic and Kacelnik 2004, respectively) working in tandem will be the key to dissecting, understanding, and reconstructing mechanistic models of vigilance. A.L.J. was funded by a research scholarship from the Institute of Biomedical and Life Sciences, University of Glasgow. We thank two anonymous referees for their thorough and insightful comments that improved this paper—most notably for pointing out that the group may not be a single entity. Thanks also to Daniel Haydon and Ashley Ward for their useful input. REFERENCES Aoki I. 1982. A simulation study on the schooling mechanism in fish. Bull Jpn Soc Sci Fish 48:1081–8. Bahr DB, Bekoff M. 1999. Predicting flock vigilance from simple passerine interactions: modelling with cellular automata. Anim Behav 58:831–9. Beauchamp G. 2001. Should vigilance always decrease with group size? Behav Ecol Sociobiol 51:47–52. Beauchamp G. 2002. Little evidence for visual monitoring of vigilance in zebra finches. Can J Zool 80:1634–7. Beauchamp G. 2003. Group-size effects on vigilance: a search for mechanisms. Behav Process 63:111–21. 538 Beauchamp G, Fernández-Juricic E. 2005. The group-size paradox: effects of learning and patch departure rules. Behav Ecol 16:352–7. Bednekoff PA. 1997. Mutualism among safe, selfish sentinels: a dynamic game. Am Nat 150:373–92. Bednekoff PA. 2001. Coordination of safe, selfish sentinels based on mutual benefits. Ann Zool Fenn 38:5–14. Bednekoff PA, Lima SL. 1998. Re-examining safety in numbers: interactions between risk dilution and collective detection depend upon predator targeting behaviour. Proc R Soc Lond B Biol Sci 265:2021–6. Couzin ID, Franks NR. 2003. Self-organized lane formation and optimized traffic flow in army ants. Proc R Soc Lond B Biol Sci 270: 139–46. Couzin ID, Krause J, James R, Ruxton GD, Franks NR. 2002. Collective memory and spatial sorting in animal groups. J Theor Biol 218:1–11. Cresswell W. 1994. Flocking is an effective anti-predation strategy in redshanks, Tringa-tetanus. Anim Behav 47:433–42. de Oliveira CR, Ruiz-Miranda CR, Kleiman DG, Beck BB. 2003. Play behavior in juvenile golden lion tamarins (Callitrichidae: Primates): organization in relation to costs. Ethology 109:593–612. Dehn MM. 1990. Vigilance for predators—detection and dilution effects. Behav Ecol Sociobiol 26:337–42. Durbin R, Eddy S, Krogh A, Mitchison G. 1998. Biological sequence analysis. Cambridge: Cambridge University Press. Fernández-Juricic E, Erichsen JT, Kacelnik A. 2004. Visual perception and social foraging in birds. Trends Ecol Evol 19:á25–31. Fernández-Juricic E, Kacelnik A. 2004. Information transfer and gain in flocks: the effects of quality and quantity of social information at different neighbour distances. Behav Ecol Sociobiol 55:502–11. Fitzgibbon CD. 1989. A cost to individuals with reduced vigilance in groups of Thomsons gazelles hunted by cheetahs. Anim Behav 37:508–10. Grimmett G, Welsh D. 1986. Probability: an introduction. Oxford: Oxford University Press. Krause J, Ruxton GD. 2002. Living in groups. Oxford: Oxford University Press. Behavioral Ecology Lima SL, Zollner PA. 1996. Anti-predatory vigilance and the limits to collective detection: visual and spatial separation between foragers. Behav Ecol Sociobiol 38:355–63. Milinksi M. 1990. Information overload and food selection. In: Hughes RN, editor. Behavioural mechanisms of food selection. Berlin: Springer-Verlag. p. 721–36. Nicholson JK, Holmes E, Lindon JC, Wilson ID. 2004. The challenges of modeling mammalian biocomplexity. Nat Biotechnol 22: 1268–74. Pulliam HR. 1973. On the advantages of flocking. J Theor Biol 38:419–22. Randler C. 2003. Vigilance in urban swan geese and their hybrids. Waterbirds 26:257–60. Rattenborg NC, Lima SL, Amlaner CJ. 1999. Facultative control of avian unihemispheric sleep under the risk of predation. Behav Brain Res 105:163–72. Roberts G. 1996. Why individual vigilance declines as group size increases. Anim Behav 51:1077–86. Ruxton GD. 1996. Effects of the spatial and temporal ordering of events on the behaviour of a simple cellular automaton. Ecol Modell 84:311–4. Ruxton GD, Saravia LA. 1998. The need for biological realism in the updating of cellular automata models. Ecol Modell 107: 105–12. Scheel D. 1993. Watching for lions in the grass—the usefulness of scanning and its effects during hunts. Anim Behav 46:695–704. Shettleworth SJ. 1998. Cognition, evolution, and behavior. Oxford: Oxford University Press. Terhune JM, Brillant SW. 1996. Harbour seal vigilance decreases over time since haul out. Anim Behav 51:757–63. Treherne JE, Foster WA. 1980. The effects of group-size on predator avoidance in a marine insect. Anim Behav 28:1119–22. Treherne JE, Foster WA. 1981. Group transmission of predator avoidance behaviour in a marine insect: the Trafalgar effect. Anim Behav 32:536–42. Treves A. 2000. Theory and method in studies of vigilance and aggregation. Anim Behav 60:711–22.