Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
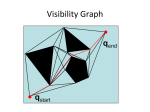
Particle Filters in Robotics, Sebastian Thrun ************************************************************************************ 1) Introduction 1970's model based approaches doesn't account for uncertainty assumes model is perfect 1980's reactive techniques i.e. behaviour based (Brooks) generate control from sensor measurements assumes sensors are perfect mid 1990's techniques that assume imperfect models and sensors probabilistic robotics integrates imperrfect models and sensors thru prob laws such as Bayes rule at all levels of perception and decision making particle filters easy: robot localization harder problems SLAM variable number of dimensions FastSLAM can handle > 100,000 dimensions in real time tracking people moving near a robot caveats will always be wrong false independence assumptions lack state variables that systematically affect sensor and actuator noise ? want state to affect noise? must work in real time - pf's computationally expensiv vanialla (exponential-time) pf's 2) Particle filters approximate techniqes for calculationg posteriors in partially observable (?) controllable (?) Markov chains (?) with discrete time state is not observable - measure with zt zt = stochastic (?) projection of true state xt Bayes filters compute posterior recursively if states, control, measurements all discrete Markov chain = hidden Markov models (HMM) then Bayes equation (1) can be implemented exactly pf's are applied to continuous state spaces closed form solns for (1) are usually unknown if p(x0) is gaussian, and motion/measurement models are linear then (1) = Kalman filter if nonlinear, can use linearize with 1st order taylor -> ekf unscented filters better linear model thru non-random sampling still rely on gaussian-linear approximation advantages to pf's can be applied to any model that can be formulated using a Markov chain anytime comp time can be changed w number of particles, depending on resources easy to implement don't have to linearize don't need closed form soln's of conditional p(xt|ut,xt-1) disadvantage d-dim state space --> exponentially many particles in d best in low-dim spaces conditional independences allow for higher dim apps (?) 3) Particle Filters in Low Dimensional Spaces classical example: robot localization state = x,y,theta position tracking - if error is small at all times (?) more general: global localization localizing robot under global uncertainty fig 1a - distribution over entire world robot could be anywhere kidnapped robot problem well-localized robot is tele-ported to other location wo being told i.e. - robo-cup - judge picking up and moving robot multi-robot localization (observing each other) fig 1 - global localization a) global uncertainty b) bimodal uncertainty - after going down symmetric corridor c) unimodal uncertanity - after going into unique room three figures represent successive posteriors (1) each particle = x,y,theta pf's for localization ==> Monte Carlo localization (MCL) motivated by condensation aglorithm - popular in computer vision more successful than parametric techniques such as KF's aibo soccer robot - only 50 particles - limited computation recent research problem: next-state probability p(xt|ut,xt-1) sometimes insufficient kidnapped robot sensor accuracy much better than control accuracy (?) hybrid sampling subset of samples generated according to measurement model ? how different from general pf? figure 3: compares standard and mixture MCL's unmodeled environmental state - artificially inflate unc to accomodate systematic noise - filters for preprocessing sensor data ex: range sensors corrupted by people clustering particles diff resampling rates for diff clusters empirically increases robustness to errs in map used in loc stratified (?) sampling techniqes to increase variance in sampling step (?) multi-robot ? are all these methods addressing problem with next-state probability? 4) Particle Filters in High Dimensional Spaces number of particles scales exponentially with state dimension similar problem with vanilla HMM's ? aren't plain pf's = vanilla HMM's? SLAM errors in robot localization -> systematic errors in feature localization absence of initial map makes it impossible to localize robot during mapping using MCL algorithms ? more possible with KF? data association problem: if two features observed at diff times are same feature space of all maps (?) is hundreds of thousdands dimensional dimension of map unknown at beginning ekf's address all of these problems except data association assume statice environment - features not moving time-invariant feature locations time-variant robot pose (2) integral only involves robot pose, not map main problems 1) complexity = O(N^2) -even wo data assoc problem scaling issues: can't manage > 1000 features in rt research into: heirarchical map representations maps decomposed recursively into submaps still O(N^2), but constant smaller 2) cannot incorporate negative information false negatives when failing to see a feature that was expected neg info leads to non-gaussian posteriors 3) no soln to data assoc problem max likelihood estimator thresholding outliers new features placed on provisional list problem: false positives -> catastrophic erros Rao-Blackwellized pf's significantly more efficient than ekf for slam 1) O(MlogN) M can be constant in case of bounded uncertaintly SLAM ekf's only work with bounded uncertainty anyway 2) can deal with neg info 3) exp results, not proven, say better at data assoc assume, first, no data assoc problem independence property ( ?) (not exploited by EKF soln's) knowledge of robot path -> feature locations cond indep (3) fig 4 - shaded region is robot path leads to (4) - more efficient version of (2) estimates post on robot paths x^t rather than xt p(x^t|z^t,u^t) each particle = posterior over entire path p(yn|x^t,z^t) feature posteriors in FastSLAM one EKF for each feature, dim = 2 pf's for robot paths as in MCL for localization feature ekfs exact, robot pose pfs approximate O(NM) N = number of features, M = num particles because of (3), conditional independence in FastSLAM, exploit fact that robot can only observe finite number of features at any point in time features in tree structures (?) becomes O(MlogN) data assoc since FastSLAM has an EKF for each feature, can keep multiple hypotheses, instead of just keeping best one can incorporate neg information by modifying importance factors of indiv particles (?) ekf more computationally expensive question: (?) for FastSLAM, why can't you just use 3d ekf for robot pose, and have no pf's? fig 5 - FastSLAM with outdoor tree detection w lasers fig 6 - lazy version of FastSLAM each particle uses max likelihood data assoc ? particle for robot pose or feature? feature locations calculated in a lazy way for the mose likely particle only ? again, particles for robot pose or feature? point estimates for features (no variance) similar to FastSLAM pf's for estimates over robot paths very good for indoor mapping tracking moving features tracking people, service robotics 1) factored pf features associated with indep pfs using maximum likelihood 2) maps to detect people differences between previous map similar to SLAM simultaneous localization of robots and people similar to FastSLAM - exploits indep property 5) Discussion tradicionally, pfs mostly used for low-dim localization problems recently, higher dim problems hybrid representations that exploit structure conditional independences further research: control above only looks at perception robot needs to do the right thing