Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
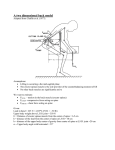
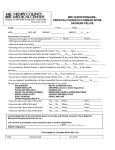
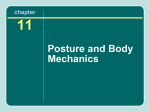
The Human Spine Working as a Lever Hillary Bierschank Charlotte Moon KINS 3592 Spring 2008 Dr. Kwon Abstract The body works by way of machines such as levers and pulleys. The bones, joints, muscles, and tendons all work together to create motion. The muscles attach to bones around joints by way of ligaments creating a system of levers. This paper focuses on the levers in the body, primarily that of the human spine. The human spine works to Introduction The purpose of this paper is to break down the movements of the different levers in the body, especially that of the spine, how it works as a lever, and what are the advantages and disadvantages of its specific design given the tasks we carry out with it. The anatomy of the spine is also key to how it works. It is comprised of strong, small boney structures held taught with muscles and ligaments to provide stability, strength, and movement. The intervertebral disks provide a cushioning and basis for allowing any movement to occur in the spine. Basic spinal anatomy The spine is made up of a multitude of bones and tissue. Each bone and each different type of tissue is designed to perform a specific task and function for a specific purpose. The spine is divided into its vertebrae. There are 33 total vertebrae in the human spine. Starting at the head and moving down towards the pelvis there are the 7 cervical vertebrae, 12 thoracic vertebrae, 5 lumbar vertebrae, and at the inferior end of the spine there are five vertebrae that fuse together to form the sacrum, and lastly 4 vertebrae fused together to form the coccyx. The vertebrae making up the cervical vertebrae are the smallest vertebrae. The thoracic vertebrae are slightly larger in size in order to support not only the weight of the body around those vertebrae but also the weight above them. As we move further down the spine to the lumbar vertebrae the size increases again. The lumbar vertebrae are the largest in size and their job in the weight bearing of the human body increases as well. The vertebrae are designed with a hollow neural arch and several ‘bony processes’ (Hall 2006) The purpose of the neural arch is to allow for the spinal cord to travel through with its associated blood vessels. This pathway is referred to as the vertebral canal. (Hall 2006) The vertebral canal provides the passage way for all of the nerves to be distributed throughout the body to provide stimulus for body movement and feeling. Each vertebra also has what is called a bony process. The purpose of the bony process on each vertebra is to ‘serve as outriggers to improve the mechanical advantage of the attached muscles.’ (Hall 2006) In order for this movement to occur between each vertebra there is something called a vertebral disk acting as a cushion and reducing the friction of the movements. Vertebral disks are made up of fibrocartilaginous tissue. According to Hall, these disks make up one fourth of the height of the spine. Without these disks, movement would be very painful and virtually impossible. Spinal Stability The ligaments in the spine provide support and stability. Along the posterior of the spine runs the posterior longitudinal ligament while the anterior longitudinal ligament runs along the anterior side of the spine. These ligaments work with the interspinous ligaments and supraspinous ligaments to provide the spine with stability to the spine as a whole, as well as stability between each vertebra. (Hall 2006) Working with the ligaments are multiple muscles. The muscles not only help in providing stability but they also provide the force for the movement of the spine. The abdominal muscles, mainly the rectus abdominis, external obliques, and internal obliques, are the ‘major spinal flexors and also reduce anterior pelvic tilt.’ (Hall 2006) The muscles predominately responsible for the movement of the cervical spinal region are the rectus capitis anterior, rectus capitis lateralis, longus capitis, longus colli, and eight pairs of hyoid muscles. (Hall 2006) These muscles allow for the rotation and flexion of the head and neck. The extensors of the neck area are controlled by the splenius capitis and splenius cervicis. Contraction of one of these muscles only will produce a sideward motion of the head as if looking over the shoulder. The major muscles contracting to produce extensor motion of the spine are the posterior thoracic and lumbar region muscle groups. The erector spinae, the semispinalis, and the deep spinal muscles (Hall 2006). According to Hall the major extensor and hyperextensors of the trunk are the most often strained. How the Body Works as a Lever The human body structure consists of bones, cartilage, muscles, tendons, and ligaments. The human body combines these varying tissues to create motion and movement in amazing ways. This is accomplished with a system of levers created by the bones, muscles, and ligaments. Hall explains that the lever is formed within the body when the muscles attached to the bone develop tension, creating a force that pulls on the bone (Hall 2006). The bone acts as a bar and the fulcrum is formed by the articulating joints (Scherger). Two forces act upon the bones which are shown in the figures below. One force is known as the Resistance force and can be supplied by an external mass such as in a weight or by an internal mass such as in the weight of a body part (Scherger). Resistance force (R) can be identified as that force acting on the lever that does not possess variability (Scherger).The resistance force of the weight acts on the fixed lever arm, the bone causing rotation at the fulcrum. (Scherger) The second force, shown as (E) in the diagram below is the amount of force generated by a muscle acting on a fixed lever arm, the bone, and causes an opposing rotation to force R at the fulcrum. Force E possess variability, meaning its magnitude force can be manipulated such as muscle length, or fiber activation in the human body (Scherger). This interaction of bone, muscle, and force provide a lever system that allows the body to perform many tasks ranging from gross motor skills such as running, to fine motor skills such as typing. There are three classifications of levers: first class, second class, and third class (Hall 2006). The first-class lever occurs when the fulcrum is located between the force (E) and the resistance force (R) and both force and resistance force are acting in the same direction (Hall 2006). The Second class lever occurs when the resistance force is closest to the fulcrum and the resistance force and applied force are acting in opposite directions (Hall 2006). Finally, the third class lever occurs when the applied force is closest to the fulcrum and the force and resistance force are acting in opposite directions. -First Class Lever -Second Class Lever -Third Class Lever Images taken from John S. Scherger, D.C. The Study of Human Movement by the Application of Biomechanical Muscular Skeletal Leverage Physics: Understanding the Effective Lever Arm. There are advantages and disadvantages to all three types of levers. The advantage is determined as the mechanical advantage which is the ratio of moment arm of force to the moment arm of resistance (Hall 2006). In a first class lever, the mechanical advantage depends on how close the applied force or resistance force is to the fulcrum (Hall 2006). Studies have shown that first class levers can have either good or poor mechanical advantage depending on the distance at which the force of resistance or force of effort is applied to the fixed lever arm (Scherger). Second class levers possess good mechanical advantage because of the distance at which the force of effort is affecting the fixed lever. In this situation the lever arm is longer than the distance at which the force of resistance is affecting the lever arm (Scherger). For this reason, second class levers have the mechanical advantage of being able to combat larger amount of resistive force with less applied force (Hall 2006). However, in the human the only times when second class lever systems are identified are when agonist and antagonist muscles apply forces in opposite directions (Hall 2006). One reason for the lack of second class levers systems seen in joints is that the second class lever sacrifices motion (Hall 2006). Most joints in the body are actually third class lever systems. In contrast to second class levers, third class levers are considered to have poor mechanical advantage because the distance at which the force of effort is affecting the fixed lever arm is longer than the distance at which force of resistance is affecting the fixed lever arm (Scherber). However, one crucial component of the body, the spine is actually a first class lever. How the Human Spine Works as a Lever The spine is composed of vertebral disks that are further segmented into the cervical vertebrae, thoracic vertebrae, lumbarsacral region. The spine in combination with the back muscles and ligaments comprises a first class lever. The spine provides the lever arm, or fulcrum, where agonist and antagonist muscles attach and provide force and resistant force (Liang). This interaction allows the spine to endure forces that arise from everyday activities such as maintaining posture, bending over, and lifting. Forces the on the Human Spine The spine endures several types of forces; compression, shear, and torsion. Enduring Force Several different forces act on the spine which includes body weight, tension in the spinal ligaments, tension in the surround muscles, intra-abdominal pressure, and any applied external loads (Hall 2006). Once the spine is held in a stable, rigid formation by supporting muscles, it can sustain massive purely compressive loads many times greater than the force of body weight alone (Liang, 2006). In addition, the spine not only has to withstand compressive forces several times the force of weight it is further complicated by allowing varying ranges of motion of movement at the same time (Biomed n.d.). The magnitude of the compressive force acting on the spine is illustrated by an excerpt from a study conducted by Ruff that showed that the proportional limit and yield point of spinal units (Biomed n.d.).The studied showed that disc complexes and isolated vertebra in axial compression measured to be yield points of 5800 N to 10500 N for thoracic and lumbar vertebra that increases with increasing vertebral size (Biomed, n.d.). Majority of the force acting on the spine usually stems from muscle activity due to the fact that the spinal muscles have extremely small moment arms with respect to the vertebral joint (Hall 2006). As a result of the small moment arms, the muscles must generate large enough forces to counteract the torques produced about the spine by the weights of the body segments and external loads (Hall, 2006). This table illustrates the compressive breaking loads measured for each vertebra in the spinal column. Note This was taken breaking from ….. loading and thatimages the compressive shows the as amount of increasing increases the vertebrae become pressure load that the vertebrae larger. The correlation is that asof the the spine withstand as the bones size increases of the vertebra increase with increases thesize. surface area is increased and therefore resistance to force is increased. Image takenfrom The table illustrates that for normal adults, the absolute failure load increases from the cervical 920N down to the lumbar spine 1606N. The increase in maximum compression loads is linked to the increasing sizes of the vertebrae (Biomed n.d.).The increased size translates to increase surface area, where pressure can be further distributed as illustrated in the table below (Biomed n.d.). Other adaptations occur within the spine to combat these significant forces, making the vertebral bones resilient against compressive forces. This adaptation is vital for the survival of the human motion since compression is the most common form of loading on the spine and accompanies many acts of daily living. Some examples of the magnitude of compressive force acting on the spine during certain activities are shown in the figure below. Figure taken from Spine Biomechanics. (n.d.). Mer/Bio Soft Tissue Mechanics. As seen in the figure, compression increases with standing, increases more with spinal flexion, and increases still furthers with extension. The increase in compression force is caused by several factors. One such factor is that increased forces during flexion and extension occurs because of a combination production of compressive stress on one side of the discs and tensile stress on the other side (Hall, 2006). Another contribution to the differences in force seen is that Lateral flexion twisting torques generate 1400 N and 2500 N of compression on the joint. (Hall 2006). In addition, tension in antagonist trunk muscles produces a significant part of these increased loads. Asymmetrical frontal plane loading of the trunk also increases both compressive and shear loads on the spine because of the added lateral bending moment (Hall 2006). The tension created by the trunk extensors increases with spinal flexion as the spine approaches full flexion when it then abruptly disappears possibly because of the vertebral spinal volume reaching equilibrium (Hall 2006). Spinal Adaptations The combination of forces of body weight and muscle tension torque, places heavy compression on the vertebral column that the human body has methods for distributing. One adaptation is the method of force load distribution. The figure below illustrates how force load distribution occurs in the spine. Typical load-displacement response for a spinal unit. From White & Panjabi Clinical Biomechanics of the Spine. Initially the spine exists in neutral position, the natural curvature of the spine. Whenever force is applied, the spine transitions from the neutral position to a position where an appreciable resistance is first encountered, this transition state is known as the neutral zone (Biomed n.d.). During the neutral zone the muscle of the spine can tolerate loads while maintaining resting muscle lengths up to a certain point. For this reason the significance of the neutral zone is that during this period the spine undergoes relatively large motions with very little muscular effort (Biomed n.d.).Once the force become greater than the neutral point the muscles must lengthen and contract to combat the applied force. Physiologically, a phase of stiffening is encountered next and is known as the elastic zone (EZ). This period is seen on the graph and extends the area between the neutral zone and the elastic zone. As the applied force increases, the muscle activity also increases. This trend of displacement of force within the spinal column increases until the spinal unit reaches maximum physiological load. Once maximum physiologic load is reached the vertebrae, muscles, and ligaments can no longer withstand any great applied force and this peak determines the limit of motion for an activity also known as the range of motion (Biomed n.d.). If the greater force is applied beyond the maximum physiologic load it is almost certain that injury will occur. Possible injury could include fracture of the vertebrae, tearing of the muscles, tearing of the ligaments, or herniation of the vertebral disks. Another mechanism to which the spine withstands forces is through changes in muscle moment arm length. Torque generated by the change in muscle arm length contributes to force adaptation of the spine during selective movements. This thought is supported by a study conducted by Karl Daggfelt that found that the change in muscle arm length gave the largest spinal unloading when the spine underwent flexion (2003). The ability of muscles such as the rectus capits, that allow flexion in the cervical region, to lengthen allows for greater muscle torque production and therefore are able to withstand larger forces. Preventing Spinal Injury To prevent injury the spine has several adaptations. One such adaptation is the natural curvature of the spine itself. The anatomical curves in the spine allow the spine to absorb more shock without injury (Hall, 2006). This is consistent with curvature throughout the spine but is significantly seen in lumbarsacral region. Because of the curvature the force of compression is directed diagonally towards the coccyx while at the same time shear force is directed in an opposite diagonal direction towards the pubic bone (Hall, 2006). The opposite direction of shear force and compression force counteract enabling the spinal unit to endure larger forces. Another adaptation is a reduction of volume within the intervertebral disks. When a force, such as compression occurs, the intervertebral disks will reduce their volume of water (Hall 2006). The change in water volume increases the internal disk pressure until it is equal to external pressure. Because the surface are of the spine cannot be changed the pressure must change in order to withstand the change in forces. When the applied force is reduced water and the load is stabilized the disks will reabsorb water and stiffening of the spine occurs (Hall, 2006). It is possible that the stiffening of the spine after water loss could be related and contributes to the spinal stiffening that occurs during the elastic zone of the maximal physiologic loading distribution pattern. Injury Although the spine is built to withstand larger forces than it’s own weight, back injuries are prevalent and common for many humans. Several reason are associated with injury to the spine including that revolve around improper mechanics such as over stretching of muscles during movement, hypermobility and exertion of muscle force, and abnormal movement such as lordosis or pelvic tilting. During flexion, when the spine is fully flexing it changes the orientation and length of the surrounding muscles. One particular muscle group, the longissimus, iliocostalis complex is affected to where the ability of the lumbar extensors are compromised (McGill, 2000). In full flexion, the muscle groups are over streatched, reducing the ability of the muscles to contract to produce torque, and stabilization of the spine is weakened (McGill, 2003). The forces applied compression and shear, are greater than what the muscle can withstand and as a result, tearing of the tissues can occur leading to loss of spinal stability leading to herniation of the vertebral disks (McGill, 2000). Hypermobility is a second cause seen in injuries. The spine experiences hypermobility readily as it cannot withstand large forces for long. As a result the muscle surround the spine must generate force to stabilize te spine and generate forces to countact loads placed on the spine. This muscle exertion places even greater compression on the spine and increases the risk of injury to ligaments and adjacent mscles (Shairazi-Adi, 2000). For this reason the spin can have functionally excessive displacements under compression loads as low as only 20 to 80N when abmormal motion such as lordosis or pelvic tilt occur (Shairizai-Adi, 2000). Summary The spine is an amazing part of the human machine due to its anatomical makeup which allows for several biomechanical functions. One of these functions is the wide range of motion that the spine allows. The human spine allows the body to move in all three planes of motion via a first class lever system consisting of the spine as the fulcrum and the attached ligaments and muscles. This system is a delicate and complex cooperation of muscle tension created by torque and the compressible strength of the vertebral disks. Through anatomical adaptations the human spine is able withstand large, almost unhuman, amounts of force, significant proof that the spine is one of the most important attributions of the success and progress of human motion and life. References Daggfeldt, K. Thorstensson, A.(2003). The mechanics of back-extensor torque production about the lumbar spine. Journal of Biomechanics36(6). Retrieved March 31, 2008, from ScienceDirect database. Hall, Susan J. (2006). Basic Biomechanics (5th ed.). New York: McGraw-Hill. Martini, Frederic H. (2004). Human Antomy (5th ed.). San Franciscoo: Pearson Education, Inc. as Benjamin Cummings. McGill, S., Hughson, R. L., Parks, K. (2000). Changes in lumbar lordosis modify the role of extensor muscles. Clinical Biomechanics 15(10). Retrieved March 31, 2008, from ScienceDirect database. Ning , L. (2006). The Biomechanics of Back Pain An engineer applies basic mechanics to understand maladies of the spine. Yale Scientific. Retrieved March 03, 2008, 79.4. Scherger, J. S. (n.d.). The Study of Human Movement by the Application of Biomechanical Muscular Skletal Leverage Physics: Understanding the Effective Lever Arm. Retrieved March 12, 2008 from http://www.spinalfitness.com/Demo/effective%20lever%20arms.PDF. Shirazi-Adi, A., Parnianpour, M. (2000). Load-bearing and stress analysis of the human spine under a novel wrapping compression loading. Clinical Biomechanics 15(10). Retrieved March 31, 2008, from ScienceDirect database. Spine Biomechanics. (n.d.). Mer/Bio Soft Tissue Mechanics. Retrieved February 20, 2008, from http://engineering.union.edu/~rapoffa/MER445/Module%206%20Intervertebral%20Disc/Spine% 20Biomechanics.pdf.