Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Statistics
of Anatomic Geometry
Stephen Pizer, Kenan Professor
Medical Image Display & Analysis Group
University of North Carolina
This tutorial and other relevant papers can be found at
website: midag.cs.unc.edu
Faculty: me, Ian Dryden, P. Thomas Fletcher,
Xavier Pennec, Sarang Joshi, Carole Twining
MIDAG@UNC
Geometry of Objects in Populations
via representations z
Uses
for probability density p(z)
Sampling
p(z) to communicate
anatomic variability in atlases
Issue:
geometric propriety of samples?
Log
prior in posterior optimizing
deformable model segmentation =
registration
Optimizez
p(z|I),
so log p(z) + log p(I|z)
Or
E(z|I)
MIDAG@UNC
Geometry of Objects in Populations
via representations z
Uses
for probability density p(z)
Compare
Medical
two populations
science
Hypothesis testing with null hypothesis
p(z|healthy) = p(z|diseased)
If null hypothesis is not accepted, find
localities where probability densities differ
and characterization of shape difference
Diagnostic:
Is particular patient’s
geometry diseased? p(z|healthy, I)
vs. p(z|diseased, I)
MIDAG@UNC
Needs of Geometric Representation z
& Probability Representation p(z)
Accurate p(z) estimation with limited samples,
i.e., beat High Dimension Low Sample Size
(HDLSS: many features, few training cases)
Measure
of predictive strength of representation and
statistics [Muller]:
d zˆ , z
test
k
2
k
/ d z
training 2
k
test
k
,z
training 2
where “^” indicates projection onto training data principal
space
Primitives’ positional
correspondence; cases alignment
Easy fit of z to each training segmentation or image
MIDAG@UNC
Needs of Geometric Representation z
& Probability Representation p(z)
Make significant geometric effects intuitive
Null probabilities for
geometrically illegal objects
Localization
Handle multiple objects
and interstitial regions
Speed and space
MIDAG@UNC
Schedule of Tutorial
Object representations (Pizer)
PCA, ICA, hypothesis testing, landmark statistics, objectrelative intensity statistics (Dryden)
Statistics on Riemannian manfolds, of m-reps & diffusion
tensors, maintaining geometric propriety (Fletcher)
Statistics on Riemannian manfolds: extensions and
applications (Pennec)
Statistics on diffeomorphisms, groupwise registration,
hypothesis testing on Riemannian manifolds (Joshi)
Information theoretic measures on anatomy,
correspondence, ASM, AAM (Twining)
Multi-object statistics & segmentation (Pizer)
MIDAG@UNC
Representations z of Deformation
Landmarks
Boundary
of objects (b-reps)
Points
spaced along boundary
or Coefficients of expansion in
basis functions
or Function in 3D with level set as
object boundary
Deformation
velocity seq. per voxel
Medial representation of objects’
interiors (m-reps)
MIDAG@UNC
Landmarks as Representation z
z = (p1, p2, …,pN)
First historically
Kendall, Bookstein,
Dryden & Mardia, Joshi
Landmarks defined by
special properties
Won’t find many accurately in 3D
Global
Alignment via minimization of
inter-case Spoints distances2
MIDAG@UNC
B-reps as Representation z
Point samples: z = (p1, p2, …,pN)
Like
landmarks; popular
Characterization of local translations of shell
Fit to training objects pretty easy
Handles multi-object complexes
Global
Positional correspondence of primitives
Slow reparametrization optimizing p(z) tightness
Problems
with geometrically improper fits
Mesh by adding sample neighbors list
Point, normal samples: z = ([p1,n1],…,[pN,nN])
Easier
to avoid geometrically improper fits
MIDAG@UNC
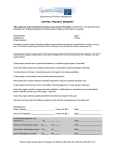
B-reps as Representation z
Basis function coefficients
z = (a1, a2, …,aM) with
p(u) = Sk=1M ak k(u)
Achieves geometric propriety
Fitting to data well worked out
and programmed
Implicit, questionable positional
correspondence
Global,
Unintuitive
Alignment via first ellipsoid
1
7
12
Representations via
spherical harmonics
MIDAG@UNC
B-rep via F(x)’s level set: z = F,
an image
Allows topological variability
Topology change
Global
Unintuitive, costly in space
Fit to training cases easy:
F = signed distance to boundary
Modification by geometry limited diffusion
Requires nonlinear statistics: not yet well developed
Serious problems of geometric propriety if stats on F;
needs stats on PDE for nonlinear diffusion
Correspondence?
Localization: via spatially varying PDE parameters??
MIDAG@UNC
Deformation velocity sequence
for each voxel as representation z
z = ([v1(i.j), v2(i.j),…,vT(i.j)], (i.j) pixels)
Miller, Christensen, Joshi
Labels in reference move with deformation
Series of local interactions
Deformation energy minimization
Fluid
flow; pretty slow
Costly in space
Slow and unsure to fit to
training cases if change
from atlas is large
MIDAG@UNC
M-reps as Representation z
Represent the Egg, not the Eggshell
The eggshell: object boundary primitives
The egg: m-reps: object interior
primitives
Poor for object that is tube, slab mix
Handles multifigure objects and multiobject complexes
Interstitial
space??
MIDAG@UNC
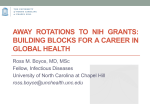
A deformable model of the
object interior: the m-rep
Object interior primitives:
medial atoms
Local displacement,
bending/twisting, swelling:
intuitive
Neighbor geometry
Objects, figures, atoms, voxels
Object-relative coordinates
Geometric
impropriety:
math check
MIDAG@UNC
Medial atom as a nonlinear
geometric transformation
Medial atoms carry position, width,
2 orientations
deformation T 3 × + × S2
× S2 (× + for edge atoms)
From reference atom
Hub translation × Spoke magnification
in common × Spoke1 rotation ×
Spoke2 rotation (× crest sharpness)
Local
M-rep is n-tuple of medial atoms
Tn
medial
atom
edge
medial
atom
, n local T’s, a curved, symmetric space
Geodesic distance between atoms
Nonlinear statistics are required
MIDAG@UNC
Fitting m-reps into training binaries
Optimization penalties
Distance
between m-rep and
binary image boundaries
Irregularity penalty: deviation of
each atom from geodesic average
of its neighbors
Yields correspondence(?)
Avoids geometric impropriety(?)
Interpenetration
avoidance
Alignment via minimization of
inter-case
Satoms geodesic distances2
MIDAG@UNC
Schedule of Tutorial
Object representations (Pizer)
PCA, ICA, hypothesis testing, landmark statistics, objectrelative intensity statistics (Dryden)
Statistics on Riemannian manfolds, of m-reps & diffusion
tensors, maintaining geometric propriety (Fletcher)
Statistics on Riemannian manfolds: extensions and
applications (Pennec)
Statistics on diffeomorphisms, groupwise registration,
hypothesis testing on Riemannian manifolds (Joshi)
Information theoretic measures on anatomy,
correspondence, ASM, AAM (Twining)
Multi-object statistics & segmentation (Pizer)
MIDAG@UNC
Multi-Object Statistics
Need both
Object statistics
Inter-object relation statistics
We choose m-reps because of
effectiveness in expressing interobject geometry
Medial atoms as transformations of
each other
Relative positions of boundary
Spokes as normals
Object-relative coordinates
MIDAG@UNC
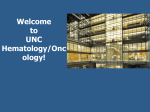
Statistics at Any Scale Level
Global: z
By object z1k
Object
By figure (atom mesh) z2k
Figure
neighbors N(z3k)
By voxel or boundary vertex
Voxel
neighbors N(z2k)
By atom (interior section) z3k
Atom
neighbors N(z1k)
neighbors N(z4k)
Designed for HDLSS
atom level
voxel level
quad-mesh neighbor
relations
MIDAG@UNC
Multiscale models of spatial parcelations
Finer parcellation zj as j increases (scale decreases)
Fuzzy edged apertures zjk, with fuzz (tolerance)
decreasing as j increases
Geometric representation zjk
We use m-reps to represent objects at moderate scale and
diffeomorphisms to modify that representation at small scale
Level sets of pseudo-distance functions can represent the variable
topology interstitial regions
Provides localization
MIDAG@UNC
Statistics of each entity
in relation to its neighbors at its scale level
on estimating p(zjk , {zjn: n k}),
via probabilities that reflect both interobject (region) geometric relationship
and object themselves (also for figures)
Focus
Markov
random field
Conditional probabilities p(zjk | {zjn: n k})
p(zjk | {zjn: N(zjk)})
Iterative Conditional Modes – convergence
joint mode of p(zjk , {zjn: n k} | Image)
=
to
MIDAG@UNC
Representation of multiple objects via
residues from neighbor prediction
Inter-entity and inter-scale relation by
removal of conditional mean of entity
on prediction of its neighbors, then
probability density on residue
| {zjn: N(zjk)}) = p(zjk interpoland
zjk: from N(zjk)})
p(zjk
Restriction of zjk to its shape space
Early
coarse-to-fine posterior optimization
segmentation results successful, but still under study
Alternative to be explored
Canonical
correlation
MIDAG@UNC
Want more info?
This tutorial, many papers on b-reps, m-reps,
diffeomorphism-reps and their statistics and
applications can be found at website
http://midag.cs.unc.edu
12
MIDAG@UNC
MIDAG@UNC