Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
COMP 4200:
Expert Systems
Dr. Christel Kemke
Department of Computer Science
University of Manitoba
© C. Kemke
Inexact Reasoning
1
Inexact Reasoning
References:
Jackson, Chapter 19, Truth Maintenance Systems
Giarratano and Riley, Chapters 4 and 5
Luger and Stubblefield 'Artificial Intelligence', AddisonWesley, 2002, Chapter 7
© C. Kemke
Inexact Reasoning
2
Knowledge & Inexact Reasoning
inexact knowledge (truth of not clear)
incomplete knowledge (lack of knowledge about
)
defaults, beliefs (assumption about truth of )
contradictory knowledge ( true and false)
vague knowledge (truth of not 0/1)
© C. Kemke
Inexact Reasoning
3
Inexact Reasoning
Inexact Reasoning
CF Theory - uncertainty
uncertainty about facts and conclusions
Fuzzy - vagueness
truth not 0 or 1 but graded (membership fct.)
Truth Maintenance - beliefs, defaults
assumptions about facts, can be revised
Probability Theory - likelihood of events
statistical model of knowledge
© C. Kemke
Inexact Reasoning
4
Inexact Reasoning not necessary ...
NOT necessary when assuming:
complete knowledge about the "world"
no contradictory facts or rules
everything is either true or false
This corresponds formally to a complete consistent theory
in First-Order Logic, i.e.
everything you have to model is contained in the theory, i.e.
your theory or domain model is complete
facts are true or false (assuming your rules are true)
your sets of facts and rules contain no contradiction (are
consistent)
© C. Kemke
Inexact Reasoning
5
Exact Reasoning:
Theories in First-Order Predicate Logic
Theory (Knowledge Base) given as a set of well-formed
formulae.
Formulae include facts like
mother (Mary, Peter)
and rules like
mother (x, y) child (y, x)
Reasoning based on applying rules of inference of first-order
predicate logic, like Modus Ponens:
p, pq
q
If p and pq given then q can be inferred (proven)
© C. Kemke
Inexact Reasoning
6
Forms of Inexact Knowledge
uncertainty (truth not clear)
incomplete knowledge (lack of knowledge)
assume P is true, as long as there is no counter-evidence (i.e.
that ¬P is true)
assume P is true with Certainty Factor
contradictory knowledge (true and false)
P true or false not known ( defaults)
defaults, beliefs (assumptions about truth)
probabilistic models, multi-valued logic (true, false, don't
know,...), certainty factor theory
inconsistent fact base; somehow P and ¬P true
vague knowledge (truth value not 0/1; not crisp sets)
© C. Kemke
graded truth; fuzzy sets
Inexact Reasoning
7
Inexact Knowledge - Example
Person A walks on Campus towards the bus stop. A few
hundred yards away A sees someone and is quite sure
that it's his next-door neighbor B who usually goes by car
to the University. A screams B's name.
Q: Which forms of inexact knowledge and reasoning are
involved here?
default - A wants to take a bus
belief, (un)certainty - it's the neighbor B
probability, default, uncertainty - the neighbor goes home by car
default - A wants to get a lift
default - A wants to go home
© C. Kemke
Inexact Reasoning
8
Examples of Inexact Knowledge
Person A walks on Campus towards the bus stop. A few hundred
yards away A sees someone and is quite sure that it's his nextdoor neighbor B who usually goes by car to the University. A
screams B's name.
Fuzzy - a few hundred yards
define a mapping from "#hundreds" to 'few', 'many', ...
not uncertain or incomplete but graded, vague
Probabilistic - the neighbor usually goes by car
probability based on measure of how often he takes car;
calculates always p(F) = 1 - p(¬F)
Belief - it's his next-door neighbor B
"reasoned assumption", assumed to be true
Default - A wants to take a bus
assumption based on commonsense knowledge
© C. Kemke
Inexact Reasoning
9
Dealing with Inexact Knowledge
Methods for representing and handling:
1. incomplete knowledge: defaults, beliefs
Truth Maintenance Systems (TMS); non-monotonic reasoning
2. contradictory knowledge: contradictory facts or
different conclusions, based on defaults or beliefs
TMS, Certainty Factors, ... , multi-valued logics
3. uncertain knowledge: hypotheses, statistics
Certainty Factors, Probability Theory
4. vague knowledge: "graded" truth
Fuzzy, rough sets
5. inexact knowledge and reasoning
involves 1-4; clear 0/1 truth value cannot be assigned
© C. Kemke
Inexact Reasoning
10
Truth Maintenance Systems
© C. Kemke
Inexact Reasoning
11
Truth Maintenance
Necessary when changes in the fact-base lead to
inconsistency / incorrectness among the facts
non-monotonic reasoning
A Truth Maintenance System tries to adjust the
Knowledge Base or Fact Base upon changes to
keep it consistent and correct.
A TMS uses dependencies among facts to keep
track of conclusions and allow revision / retraction
of facts and conclusions.
© C. Kemke
Inexact Reasoning
12
Non-monotonic Reasoning
non-monotonic reasoning
The set of currently valid (believed) facts does NOT
increase monotonically.
Adding a new fact might lead to an inconsistency
which requires the removal of one of the contradictory
facts.
Thus, the set of true (or: believed as true) facts can
shrink and grow with reasoning.
This is why it’s called “non-monotonic reasoning”.
In classical logic (first-order predicate logic) this does
not happen. Once a fact is asserted, it’s forever true.
© C. Kemke
Inexact Reasoning
13
Non-monotonic Reasoning - Example
Example: non-monotonic reasoning
Your are a student, it's 8am
, you are in bed.
You slip out of your dreams and think: Today is Sunday. No
classes today. l don't have to get up. You go back to sleep.
You wake up again. It's 9:30am
now and it is slowly coming
to your mind: Today is Tuesday. What an unpleasant surprise.
P1 = today-is-Tuesday
P3 = have-class-at-10am
P5 = have-to-get-up
© C. Kemke
P2 = today-is-Sunday
P4 = no-classes
P6 = can-stay-in-bed
Inexact Reasoning
14
Non-monotonic Reasoning - Example
P1 = today-is-Tuesday
P3 = have-class-at-10am
P5 = have-to-get-up
P1 P3 P5
P2 P4 P6
P2 = today-is-Sunday
P4 = no-classes
P6 = can-stay-in-bed
Assume: P1 and P2, P3 and P4, P5
and P6 are mutually exclusive, i.e.
P1 P2, P3 P4, P5 P6
assume P2; conclude P1 ; P4 ; P3 ; P6 ; P5
assume P1; conclude P2 ; P3 ; P4 ; P5 ; P6
© C. Kemke
Inexact Reasoning
15
Truth Maintenance Theories
TMS are often based on dependency-directed
backtracking to the point in reasoning where a wrong
assumption was used.
McAllester (1978,1980)
“propositional constraint propagation”
employs a dependency network which reflects the
justification of conclusions of new facts
Doyle (1979)
justification based Truth Maintenance System
© C. Kemke
Inexact Reasoning
16
Truth Maintenance Theories - McAllester
McAllester “propositional constraint propagation”
network representing conclusions, where
proposition-nodes are connected if one of the nodes
is a reason for concluding the other node.
Example:
pq
(pq)
If p is known to be true, q can be concluded.
Connections from p and pq to q mean that p and
pq are reasons to conclude p.
© C. Kemke
Inexact Reasoning
17
Truth Maintenance Theories - McAllester
McAllester (1980)
proposition-nodes are connected if one of the nodes is a
reason for concluding the other node (simplified version).
Example:
Connections from p and pq to combination and then to q
represent justification for q
p q
p
© C. Kemke
p q
p
q
Inexact Reasoning
18
Truth Maintenance Theories - Doyle
Doyle (1979)
deals with beliefs as justified assumptions.
As long as there is no contra-evidence for a fact (belief) we
can assume that it is true.
INp facts which support P; OUTp facts which prevent P.
Distinguishes:
Premises - always true (INp = OUTp = )
Deductions - derived (INp ; OUTp = )
Assumptions – depends (INp = ; OUTp )
© C. Kemke
Inexact Reasoning
19
Truth Maintenance Theories - Doyle
Doyle (1979)
As long as there is no contra-evidence for a fact (belief)
we can assume that it is true.
Theory is based on the concept of Support-Lists (SL).
A Support-List of a Fact (Belief) P specifies Facts
(Beliefs) which support the conclusion of the Fact P or
prevent its conclusion.
The TMS maintains and updates the set of current
Facts/Beliefs if changes occur. Uses justification
networks, similar to McAllester’s dependency networks.
© C. Kemke
Inexact Reasoning
20
Truth Maintenance in CLIPS 1
logical
logical connection between condition- and action-part of a
rule
if logical-part of condition is not true anymore,
consequence-fact in action-part is retracted
(defrule fire-reaction
(logical (fire-present))
=>
(assert (alarm-on)))
When fire-present is true, alarm-on can be concluded.
When fire-present is retracted, alarm-on will also be retracted.
© C. Kemke
Inexact Reasoning
21
Truth Maintenance in CLIPS 2
Dependencies
(dependents <fact-index>)
prints all current facts which depend on the indexed fact
(are concluded from that fact)
(dependencies <fact-index>)
prints all current facts on which the indexed fact depends
(from which the indexed fact can was concluded)
dependents of fire-present
alarm-on
dependencies of fire-present
none
© C. Kemke
Inexact Reasoning
22
Certainty Factor Theory
© C. Kemke
Inexact Reasoning
23
Certainty Factor Theory
Certainty Factor CF of Hypothesis H
ranges between -1 (denial of H) and +1 (confirmation of H)
allows the ranking of hypotheses
Based on measures of belief MB and disbelief MD
MB is expressing the belief that H is true
MD is expressing the belief that H is not true
MB is not 1-MD - it’s not like probabilities
Experts determine values for MB, MD of H based on
given evidence E subjective
© C. Kemke
Inexact Reasoning
24
Stanford Certainty Factor Theory
Certainty Factor CF of Hypothesis H is based on
difference between Measure of Belief MB and Measure
of Disbelief MD in hypothesis H, given evidence E.
Certainty Factor of hypothesis H given evidence E:
CF (H|E) = MB(H|E) – MD(H|E)
-1 CF(H) 1
Can integrate different experts’ assessments.
Basis to combine support/rejection for H within one rule
and using different rules.
© C. Kemke
Inexact Reasoning
25
Stanford Certainty Factor Theory
Remember the base rule for Certainty Factor CF (H|E) :
CF (H|E) = MB(H|E) – MD(H|E)
-1 CF(H) 1
Integrate Certainty Factors into reasoning.
CF-value for H calculated using CFs of premises P in rule
CF(H) = CF(P1 and P2) = min (CF(P1),CF(P2))
CF(H) = CF(P1 or P2) = max (CF(P1),CF(P2))
CF-value for H combined from different rules, experts, ...
CF(H) = CF1 + CF2 – CF1∙ CF2
CF(H) = CF1 + CF2 + CF1∙ CF2
CF(H) =
CF1 + CF2
1 – min ( |CF1|,|CF2| )
© C. Kemke
if both CF1,CF2 > 0
if both CF1,CF2 0
else
Inexact Reasoning
26
Characteristics of Certainty Factors
(Believed)
Probability
Aspect
MB MD CF
Certainly true
P(H|E) = 1
1
0
1
Certainly false
P(H|E) = 1
0
1
-1
No evidence
P(H|E) = P(H)
0
0
0
Ranges
measure of belief
measure of disbelief
certainty factor
© C. Kemke
0 ≤ MB ≤ 1
0 ≤ MD ≤ 1
-1 ≤ CF ≤ +1
Inexact Reasoning
27
Probability Theory
© C. Kemke
Inexact Reasoning
28
Basics of Probability Theory
mathematical approach to process uncertain
information
sample space (event) set: S = {x1, x2, …, xn}
collection of all possible events
probability p(xi) is likelihood that the event xiS occurs
non-negative values in [0,1]
total probability of the sample space is 1, p(xi , xiS) = 1
experimental probability
subjective probability (CF Theories, like Dempster-Shafer, ...)
© C. Kemke
based on the frequency of events
based on expert assessment
Inexact Reasoning
29
Compound Probabilities
for independent events
do not affect each other in any way
example: cards and events “hearts” and “queen”
joint probability of independent events A and B
P(A B) = |A B| / |S| = P(A) * P(B)
where |S| is the number of elements in S
union probability of independent events A and B
P(A B) = P(A) + P(B) - P(A B)
= P(A) + P(B) - P(A) * P (B)
Situation in which either event occurs. Subtract probability of their
accidental co-occurrence - P(A B) is already included in
P(A)+P(B) and would otherwise be counted twice.
© C. Kemke
Inexact Reasoning
30
Compound Probabilities
For mutually exclusive events
can not occur together at the same time
Examples: one dice and events “1” and “6”; one coin
and events “heads” and “tail”
joint probability of two different events A and B
P(A B) = 0
Throw dice and show both “1” and “6” cannot happen.
union probability of two events A and B
P(A B) = P(A) + P(B)
Throw coin and show either “heads” or “tail”.
This is also called “special addition”.
© C. Kemke
Inexact Reasoning
31
Conditional Probabilities
describes dependent events
affect each other in some way
Example: Throw dice twice; second throw has to give
larger value than first throw.
conditional probability
of event A given that event B has already occurred
P(A|B) = P(A B) / P(B)
example: B = throw(x); A = throw(y>x)
See next slide.
© C. Kemke
Inexact Reasoning
32
Conditional Probabilities
Example: B = throw(x); A = throw(y>x)
P(A|B) = P(throw x and then throw y with y>x)
P(A|B) = P(A B) / P(B)
P(A B) = P(throw x) P(throw y, y>x) = 1/6 (1/6 (6-x))
If x=5 then P(AB) = 1/6 1/6 (6-5) = 1/36
If x=1 then P(AB) = 1/6 1/6 5 = 5/36
P(B) = P(throw x) = 1/6
P(A|B) = P(A B) / P(B)
If x=1 then P(A|B) = 5/36*6 = 5/6 0.8...
If x=5 then P(A|B) = 5/36*1 = 5/36 0.14
© C. Kemke
Inexact Reasoning
33
Bayesian Approaches
derive the probability of a cause given a symptom
has gained importance recently due to advances in
efficiency
more computational power available
better methods
especially useful in diagnostic systems
medicine, computer help systems
inverse or a posteriori probability
© C. Kemke
inverse to conditional probability of an earlier event given
that a later one occurred
Inexact Reasoning
34
Bayes’ Rule for Single Event
single hypothesis H, single event E
P(H
| E) = (P(E | H) * P(H)) / P(E)
or
P(H
© C. Kemke
| E) = (P(E | H) * P(H) /
(P(E | H) * P(H) + P(E | H) * P(H) )
Inexact Reasoning
35
Example
© C. Kemke
Inexact Reasoning
36
Fred and the Cookie Bowls
Suppose there are two bowls full of cookies.
Bowl #1 has 10 chocolate chip cookies and 30 plain
cookies, while bowl #2 has 20 of each.
Fred picks a bowl at random, and then picks a cookie at
random. We may assume there is no reason to believe
Fred treats one bowl differently from another, likewise for
the cookies.
The cookie turns out to be a plain one.
How probable is it that Fred picked it out of bowl #1?
From: http://en.wikipedia.org/wiki/Bayes'_theorem
© C. Kemke
Inexact Reasoning
37
The Cookie Bowl Problem
“What’s the probability that Fred picked bowl #1, given that he has a plain cookie?”
Event A is that Fred picked bowl #1.
Event B is that Fred picked a plain cookie.
Compute P(A|B). We need:
P(A) - the probability that Fred picked bowl #1 regardless of any other
information. Since Fred is treating both bowls equally, it is 0.5.
P(B) is the probability of getting a plain cookie regardless of any
information on the bowls. It is computed as the sum of the probability of
getting a plain cookie from a bowl multiplied by the probability of selecting
this bowl. We know that the probability of getting a plain cookie from bowl
#1 is 0.75, and the probability of getting one from bowl #2 is 0.5. Since
Fred is treating both bowls equally the probability of selecting any one of
the bowls is 0.5 (see next slide).
Thus, the probability of getting a plain cookie overall is 0.75×0.5 + 0.5×0.5
= 0.625.
P(B|A) is the probability of getting a plain cookie given that Fred has
selected bowl #1. From the problem statement, we know this is 0.75, since
30 out of 40 cookies in bowl #1 are plain.
© C. Kemke
Inexact Reasoning
38
The Cookie Bowls
Number of cookies in each bowl
by type of cookie
Bowl #1
Bowl #2
Totals
Chocolate
10
20
30
Plain
30
20
Total
40
40
Relative frequency of cookies in
each bowl
by type of cookie
Bowl #1
Bowl #2
Totals
Chocolate
0.125
0.250
0.375
50
Plain
0.375
0.250
0.625
80
Total
0.500
0.500
1.000
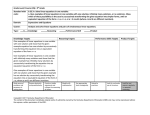
The table on the right is derived from the table on the left by dividing each entry by the total
© C. Kemke
Inexact Reasoning
39
Fred and the Cookie Bowl
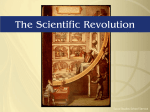
Given all this information, we can compute the probability of
Fred having selected bowl #1 (event A) given that he got a
plain cookie (event B), as such:
As we expected, it is more than half.
http://en.wikipedia.org/wiki/Bayes'_theorem
© C. Kemke
Inexact Reasoning
40
Fuzzy Set Theory
© C. Kemke
Inexact Reasoning
41
Fuzzy Set Theory (Zadeh)
Aimed to model and formalize "vague" Natural Language
terms and expressions.
Example: Peter is relatively tall.
Define a set of fuzzy sets (predicates or categories), like tall,
small.
Each fuzzy subset has an associated membership function
mapping (exact) domain values into a (graded) membership
value.
tall would be one fuzzy subset defined by such a function
which takes the height (e.g. in inches) as input, and
determines a fuzzy membership-value (between 0 and 1)
for tall and small as output.
© C. Kemke
Inexact Reasoning
42
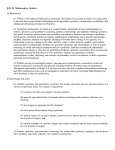
Fuzzy Set Membership Function
If Peter is 6' high, and the fuzzy membership value of tall
for 6' is 0.9, then Peter is quite tall.
© C. Kemke
Inexact Reasoning
43
Review
Inexact Reasoning
© C. Kemke
uncertain reasoning – uncertainty about facts and/or
rules – CF Theory
vagueness – truth not 0 or 1 - Fuzzy sets and Fuzzy
logic
beliefs, defaults – assumptions about truth, can be
revised – non-monotonic reasoning, Truth
Maintenance System
likelihood of event – statistical model of knowledge Probability Theory
Inexact Reasoning
44
Other Forms of Representing and
Reasoning with Inexact Knowledge
© C. Kemke
Logics
Explicit modeling of Belief- and KnowsOperators in Modal Logic or
Autoepistemic Logic.
Probabilistic Reasoning
Bayes’ Theory
Dempster-Shafer Theory
Inexact Reasoning
45
© C. Kemke
Inexact Reasoning
46