The influence of robots on the human society
... there is no evidence of it ever being build, the robot was supposed to be able to sit up, move its arms and head and open its jaw (Nilsson, 2010). The humanoid had two self-regulating structures. The lower structure which had three degrees-of-freedom-legs: ankles, knees and hips. And the higher str ...
... there is no evidence of it ever being build, the robot was supposed to be able to sit up, move its arms and head and open its jaw (Nilsson, 2010). The humanoid had two self-regulating structures. The lower structure which had three degrees-of-freedom-legs: ankles, knees and hips. And the higher str ...
Robotic-fall05-4 - Computer Engineering
... Differential steering means that the two (or more) wheels can be steered separately (individually) If one wheel can turn in one direction and the other in the opposite direction, the robot can spin in place This is very helpful for following arbitrary trajectories Tracks are often used (e.g., ...
... Differential steering means that the two (or more) wheels can be steered separately (individually) If one wheel can turn in one direction and the other in the opposite direction, the robot can spin in place This is very helpful for following arbitrary trajectories Tracks are often used (e.g., ...

Anthropomorphism: Opportunities and Challenges
... was found to lead to the social facilitation effect [120]. Moreover, when playing a game against a robotic opponent, people may utilize similar strategies as when they play against a human [137]. They also hold robots more accountable for their actions than other non-human objects [87]. This tendenc ...
... was found to lead to the social facilitation effect [120]. Moreover, when playing a game against a robotic opponent, people may utilize similar strategies as when they play against a human [137]. They also hold robots more accountable for their actions than other non-human objects [87]. This tendenc ...

cs.cmu.edu - Stanford Artificial Intelligence Laboratory
... the number of histories maintained by the algorithm. For this purpose, we will use a problem (the Lady and the Tiger) which is small enough that we can maintain all possible joint histories, so that we can compare each algorithm’s results to the best possible performance for the domain. In contrast, ...
... the number of histories maintained by the algorithm. For this purpose, we will use a problem (the Lady and the Tiger) which is small enough that we can maintain all possible joint histories, so that we can compare each algorithm’s results to the best possible performance for the domain. In contrast, ...
The Intelligent Conversational Humanoid Robot
... proxy classes that command the NAO robot. An overall flow of all three libraries and how CleverNAO uses them can be seen in Figure 5. ...
... proxy classes that command the NAO robot. An overall flow of all three libraries and how CleverNAO uses them can be seen in Figure 5. ...
Communications of the ACM
... of autonomous and adaptive machines is an open problem. Industrial robots are an example of autonomous yet nonadaptive machines: they execute the same sequence of actions repeatedly. Conversely, unmanned drones are an example of adaptive yet non-autonomous machines: they exhibit the adaptive capabil ...
... of autonomous and adaptive machines is an open problem. Industrial robots are an example of autonomous yet nonadaptive machines: they execute the same sequence of actions repeatedly. Conversely, unmanned drones are an example of adaptive yet non-autonomous machines: they exhibit the adaptive capabil ...
How Robots Work
... move the arm very precisely, repeating exactly the same movement over and over again. The robot uses motion sensors to make sure it moves just the right amount. An industrial robot with six joints closely resembles a human arm - it has the equivalent of a shoulder, an elbow and a wrist. Typically, t ...
... move the arm very precisely, repeating exactly the same movement over and over again. The robot uses motion sensors to make sure it moves just the right amount. An industrial robot with six joints closely resembles a human arm - it has the equivalent of a shoulder, an elbow and a wrist. Typically, t ...
The 1995 Robot Competition and Exhibition - David P. Miller
... tasks as goal-directed navigation, feature detection, object recognition, identification, and physical manipulation as well as effective humanrobot communication. The competition consisted of two separate events: (1) Office Delivery and (2) Office Cleanup. The exhibition also consisted of two events ...
... tasks as goal-directed navigation, feature detection, object recognition, identification, and physical manipulation as well as effective humanrobot communication. The competition consisted of two separate events: (1) Office Delivery and (2) Office Cleanup. The exhibition also consisted of two events ...

to get the file - Mechanical and Materials Engineering
... quarter of 1999 of shipments and new orders indicates that $362.8 million in new orders of 4732 robots gives an average cost of $76,864. Another estimate was observed in the results of robotics application feasibility studies for a variety of applications done by the engineering robotics students fo ...
... quarter of 1999 of shipments and new orders indicates that $362.8 million in new orders of 4732 robots gives an average cost of $76,864. Another estimate was observed in the results of robotics application feasibility studies for a variety of applications done by the engineering robotics students fo ...
Artificial Intelligence Application Robotics - Celia`s e
... I feel that Artificial Intelligence is and can be beneficial enough that it is worth investing time, effort and funding into. We can save much time with frivolous matters like production and focus more of our time on serious matters that require our brains like cancer, world hunger and the greenhous ...
... I feel that Artificial Intelligence is and can be beneficial enough that it is worth investing time, effort and funding into. We can save much time with frivolous matters like production and focus more of our time on serious matters that require our brains like cancer, world hunger and the greenhous ...
The AAAI 2006 Mobile Robot Competition and
... category tested the robot’s ability to evaluate verbal and nonverbal conversational cues in order to infer additional information about the human being conversed with. Examples of this category might be for the robot to follow human eye gaze to determine objects of interest in the environment, or to ...
... category tested the robot’s ability to evaluate verbal and nonverbal conversational cues in order to infer additional information about the human being conversed with. Examples of this category might be for the robot to follow human eye gaze to determine objects of interest in the environment, or to ...
2015_0001_Vision for Curie and soccer
... The camera will be attached to the ceiling or will be in some position very high, as high as we can. We have done something similar but the robots were small. The camera should know x,y coordinates of every robot and its orientation (pose) Marie Curie does not change its main coordinates, so it is e ...
... The camera will be attached to the ceiling or will be in some position very high, as high as we can. We have done something similar but the robots were small. The camera should know x,y coordinates of every robot and its orientation (pose) Marie Curie does not change its main coordinates, so it is e ...

Machine Ethics, the Frame Problem, and Theory of Mind
... need to account for in our inference rules (and perceptual capabilities), and the problem will only get worse as the behavioral repertoire of the robot is expanded. Letting M1 perform actions like moving towers around, throwing objects, and repainting towers, will make the programmer’s task a nightm ...
... need to account for in our inference rules (and perceptual capabilities), and the problem will only get worse as the behavioral repertoire of the robot is expanded. Letting M1 perform actions like moving towers around, throwing objects, and repainting towers, will make the programmer’s task a nightm ...
The 2004 Mobile Robot Competition and Exhibition
... More teams generating maps. Over the years, we have seen more robot entries create maps of the environment. This trend can be attributed to rules changes that encourage machine-created maps. It might also be attributed to the fact that maps can help to provide an awareness of where the robot is in t ...
... More teams generating maps. Over the years, we have seen more robot entries create maps of the environment. This trend can be attributed to rules changes that encourage machine-created maps. It might also be attributed to the fact that maps can help to provide an awareness of where the robot is in t ...

PDF
... autonomous robots. Ambitious projects in this direction are underway, such as the development of a web for robots3, where they would share data and procedures, i.e., maps of visited buildings, acquired manipulation skills, and other learned expertise, in a common hardware-independent format. This we ...
... autonomous robots. Ambitious projects in this direction are underway, such as the development of a web for robots3, where they would share data and procedures, i.e., maps of visited buildings, acquired manipulation skills, and other learned expertise, in a common hardware-independent format. This we ...

Neural Robot Detection in RoboCup
... like RoboCup also has to be very fast to be able to process all images on time. In contrast to other object detection methods used on mobile robots, the scenario described here is more natural. Objects are in front of different, cluttered backgrounds, are often partially occluded, blurred by motion ...
... like RoboCup also has to be very fast to be able to process all images on time. In contrast to other object detection methods used on mobile robots, the scenario described here is more natural. Objects are in front of different, cluttered backgrounds, are often partially occluded, blurred by motion ...
Introduction - Computer Science & Engineering
... • Most real-world robots today do perform such “obligatory work” in highly controlled environments – Factory automation (car assembly) ...
... • Most real-world robots today do perform such “obligatory work” in highly controlled environments – Factory automation (car assembly) ...
Reasoning robot, involved tasks/modules and robot world
... reasoning. E.g. General Problem Solver (A. Newell & H.A. Simon, 1959), the first computer program which separated its knowledge of problems (rules represented as input data) from its strategy of how to solve problems (a generic solver engine, mathematical logic). ...
... reasoning. E.g. General Problem Solver (A. Newell & H.A. Simon, 1959), the first computer program which separated its knowledge of problems (rules represented as input data) from its strategy of how to solve problems (a generic solver engine, mathematical logic). ...
Types of Robots
... “robots” used in advertising and entertainment are actually automata, even with the addition of remote radio control. The term robot itself is derived from the Czech word robota, meaning “compulsory labour”. It was first used in the 1921 play R.U.R. (which stands for “Rossum's Universal Robots”) by ...
... “robots” used in advertising and entertainment are actually automata, even with the addition of remote radio control. The term robot itself is derived from the Czech word robota, meaning “compulsory labour”. It was first used in the 1921 play R.U.R. (which stands for “Rossum's Universal Robots”) by ...

Definition of a `Robot`
... Typically, hydraulic or pneumatic pistons move robot legs back and forth. The pistons attach to different leg segments just like muscles attach to different bones. It's a real trick getting all these pistons to work together properly. As a baby, your brain had to figure out exactly the right combina ...
... Typically, hydraulic or pneumatic pistons move robot legs back and forth. The pistons attach to different leg segments just like muscles attach to different bones. It's a real trick getting all these pistons to work together properly. As a baby, your brain had to figure out exactly the right combina ...

A framework for making sophisticated robotics accessible
... interface also lets one put very expensive routines (like vision programs) at lower levels for faster runtime efficiency. One interesting reason for using Pyro is that the entire software, from the OpenGL interface to the neural network code, can be explored by the student. In addition, advanced stu ...
... interface also lets one put very expensive routines (like vision programs) at lower levels for faster runtime efficiency. One interesting reason for using Pyro is that the entire software, from the OpenGL interface to the neural network code, can be explored by the student. In addition, advanced stu ...

View PDF - Advances in Cognitive Systems
... An example of state-of-the-art robot technology is Google’s self-driving car (Thrun & Urmson, 2011). This is capable of the remarkable feat of driving safely in urban traffic, but to do so requires careful preparation. For example, prior to autonomous driving, the car must be driven around a locatio ...
... An example of state-of-the-art robot technology is Google’s self-driving car (Thrun & Urmson, 2011). This is capable of the remarkable feat of driving safely in urban traffic, but to do so requires careful preparation. For example, prior to autonomous driving, the car must be driven around a locatio ...

fitzpatrick2
... ceptual layer. The primary direction of information flow is from lower levels to higher levels, with details being dropped along the way. A layer is useful if it drops irrelevant details; each layer has its own heuristics about what is relevant. For example, the object recognition module attempts to ...
... ceptual layer. The primary direction of information flow is from lower levels to higher levels, with details being dropped along the way. A layer is useful if it drops irrelevant details; each layer has its own heuristics about what is relevant. For example, the object recognition module attempts to ...
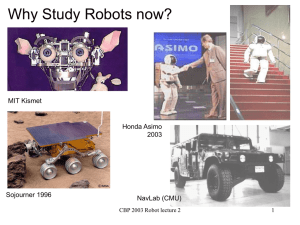
Comp 1017 Robots
... CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...
... CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...