



1.5 Smooth maps
... The situation for spheres may be contrasted with that for the Euclidean spaces: any differentiable manifold homeomorphic to Rn for n ̸= 4 must be diffeomorphic to it. On the other hand, by results of Donaldson, Freedman, Taubes, and Kirby, we know that there are uncountably many non-diffeomorphic sm ...
... The situation for spheres may be contrasted with that for the Euclidean spaces: any differentiable manifold homeomorphic to Rn for n ̸= 4 must be diffeomorphic to it. On the other hand, by results of Donaldson, Freedman, Taubes, and Kirby, we know that there are uncountably many non-diffeomorphic sm ...



Manifolds
... Prove the following proposition, which says two versions of the definition of “manifold” are equivalent: If each point of X has an open neighborhood homeomorphic to an open subset of Rm then each point of X has an open neighborhood homeomorphic to Rm . Problem 7. Page 227 #3 The point here is to use ...
... Prove the following proposition, which says two versions of the definition of “manifold” are equivalent: If each point of X has an open neighborhood homeomorphic to an open subset of Rm then each point of X has an open neighborhood homeomorphic to Rm . Problem 7. Page 227 #3 The point here is to use ...


Catalogue of Useful Topological Vectorspaces
... one. Nevertheless, for a function to possess a weak derivative is a stronger property than that of possessing a mere distributional derivative. So there are two possible ways to give a careful definition of these Sobolev spaces, one ‘from inside’, the other ‘from outside’. The first is to say that L ...
... one. Nevertheless, for a function to possess a weak derivative is a stronger property than that of possessing a mere distributional derivative. So there are two possible ways to give a careful definition of these Sobolev spaces, one ‘from inside’, the other ‘from outside’. The first is to say that L ...


locally ringed space
... sheaf on the topological space X consisting of continuous functions with values in some field is a locally ringed space. Indeed, any such function which is not zero at a point p ∈ X is nonzero and thus invertible in some neighborhood of p, which implies that the only maximal ideal of the stalk at p ...
... sheaf on the topological space X consisting of continuous functions with values in some field is a locally ringed space. Indeed, any such function which is not zero at a point p ∈ X is nonzero and thus invertible in some neighborhood of p, which implies that the only maximal ideal of the stalk at p ...

3 Topology of a manifold
... Definition 3.2 (Amended). A manifold from now on is what we have previously called a manifold satisfying, in addition, the requirements that as a topological space it is Hausdorff and second-countable. Remark 3.1. A manifold is second-countable if and only if it has a countable atlas. Indeed, suppose ...
... Definition 3.2 (Amended). A manifold from now on is what we have previously called a manifold satisfying, in addition, the requirements that as a topological space it is Hausdorff and second-countable. Remark 3.1. A manifold is second-countable if and only if it has a countable atlas. Indeed, suppose ...

PDF
... The long line (without initial point) is homogeneous, but it is not bihomogeneous as its self-homeomorphisms are all order-preserving. This can be considered a pathological example, as most homogeneous topological spaces encountered in practice are also bihomogeneous. Every topological group is biho ...
... The long line (without initial point) is homogeneous, but it is not bihomogeneous as its self-homeomorphisms are all order-preserving. This can be considered a pathological example, as most homogeneous topological spaces encountered in practice are also bihomogeneous. Every topological group is biho ...

Problem Set 1
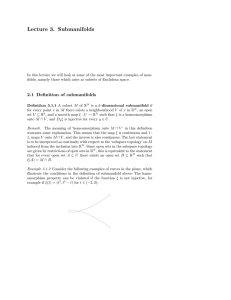
... (3) Let f : S 1 → R3 be a continuous, injective map. Prove that the image f (S 1 ) of f is homeomorphic to S 1 . (Hint: this is easy.) (4) Describe explicitly a smooth knot (image of a C 1 function with nonvanishing derivative) K in R3 so that the projection of K to R2 = {(x, y, 0)} ⊂ R3 has infinit ...
... (3) Let f : S 1 → R3 be a continuous, injective map. Prove that the image f (S 1 ) of f is homeomorphic to S 1 . (Hint: this is easy.) (4) Describe explicitly a smooth knot (image of a C 1 function with nonvanishing derivative) K in R3 so that the projection of K to R2 = {(x, y, 0)} ⊂ R3 has infinit ...

review sheet
... • Coordinate Geometry (how graphs and equations mix) • Domain and range of functions • Combination of functions (especially composition) (b) Polynomials and factoring ...
... • Coordinate Geometry (how graphs and equations mix) • Domain and range of functions • Combination of functions (especially composition) (b) Polynomials and factoring ...

HW1
... Here the vertical arrows are defined by pre- and post-composition with the given functions φ and ψi (how exactly?). One uses the word natural here to indicate that the isomorphism in (d) does not reflect specific properties of the spaces X, Y , and Z, but rather describes a general feature of the pr ...
... Here the vertical arrows are defined by pre- and post-composition with the given functions φ and ψi (how exactly?). One uses the word natural here to indicate that the isomorphism in (d) does not reflect specific properties of the spaces X, Y , and Z, but rather describes a general feature of the pr ...
Lecture 5 Notes
... smooth manifold, we’re going to require some compatibility between these coordinate charts for when they overlap. Definition 2.2. Let X be locally Euclidean of dimension n. A smooth atlas A on X is a collection {(U↵ , '↵ )} of coordinate charts satisfying (1) The U↵ ’s cover X, that is ...
... smooth manifold, we’re going to require some compatibility between these coordinate charts for when they overlap. Definition 2.2. Let X be locally Euclidean of dimension n. A smooth atlas A on X is a collection {(U↵ , '↵ )} of coordinate charts satisfying (1) The U↵ ’s cover X, that is ...

syllabus - The City University of New York
... Hunter College of The City University of New York ...
... Hunter College of The City University of New York ...





1.6 Smooth functions and partitions of unity
... Proposition 2.1. For an n-manifold M, the set T M has a natural topology and smooth structure which make it a 2n-manifold, and make π : T M −→ M a smooth map. Proof. Any chart (U, ϕ) for M defines a bijection T ϕ(U) ∼ = U × Rn −→ π −1 (U) via (p, v ) 7→ (U, ϕ, v ). Using this, we induce a smooth man ...
... Proposition 2.1. For an n-manifold M, the set T M has a natural topology and smooth structure which make it a 2n-manifold, and make π : T M −→ M a smooth map. Proof. Any chart (U, ϕ) for M defines a bijection T ϕ(U) ∼ = U × Rn −→ π −1 (U) via (p, v ) 7→ (U, ϕ, v ). Using this, we induce a smooth man ...
Differentiable manifold

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a linear space to allow one to do calculus. Any manifold can be described by a collection of charts, also known as an atlas. One may then apply ideas from calculus while working within the individual charts, since each chart lies within a linear space to which the usual rules of calculus apply. If the charts are suitably compatible (namely, the transition from one chart to another is differentiable), then computations done in one chart are valid in any other differentiable chart.In formal terms, a differentiable manifold is a topological manifold with a globally defined differential structure. Any topological manifold can be given a differential structure locally by using the homeomorphisms in its atlas and the standard differential structure on a linear space. To induce a global differential structure on the local coordinate systems induced by the homeomorphisms, their composition on chart intersections in the atlas must be differentiable functions on the corresponding linear space. In other words, where the domains of charts overlap, the coordinates defined by each chart are required to be differentiable with respect to the coordinates defined by every chart in the atlas. The maps that relate the coordinates defined by the various charts to one another are called transition maps.Differentiability means different things in different contexts including: continuously differentiable, k times differentiable, smooth, and holomorphic. Furthermore, the ability to induce such a differential structure on an abstract space allows one to extend the definition of differentiability to spaces without global coordinate systems. A differential structure allows one to define the globally differentiable tangent space, differentiable functions, and differentiable tensor and vector fields. Differentiable manifolds are very important in physics. Special kinds of differentiable manifolds form the basis for physical theories such as classical mechanics, general relativity, and Yang–Mills theory. It is possible to develop a calculus for differentiable manifolds. This leads to such mathematical machinery as the exterior calculus. The study of calculus on differentiable manifolds is known as differential geometry.