



8th Grade Math Unit 6: Kaleidoscopes, Hubcaps, and Mirrors
... Cluster Title: Understand congruence and similarity using physical models, transparencies, or geometry software. Standard 8.G.1: Verify experimentally the properties of rotations, reflections, and translations: a) Lines are taken to lines, and line segments to line segments of the same lengt ...
... Cluster Title: Understand congruence and similarity using physical models, transparencies, or geometry software. Standard 8.G.1: Verify experimentally the properties of rotations, reflections, and translations: a) Lines are taken to lines, and line segments to line segments of the same lengt ...



2nd Nine Weeks Extra Credit ID B
... Rotate figure A 90 clockwise about the origin and then translate right 5 units. Rotate figure A 90 counterclockwise about the origin and then translate down 5 units. Reflect figure A across the x-axis and then translate right 6 units and up 1 unit. Reflect figure A across the y-axis and then trans ...
... Rotate figure A 90 clockwise about the origin and then translate right 5 units. Rotate figure A 90 counterclockwise about the origin and then translate down 5 units. Reflect figure A across the x-axis and then translate right 6 units and up 1 unit. Reflect figure A across the y-axis and then trans ...




here - UNB
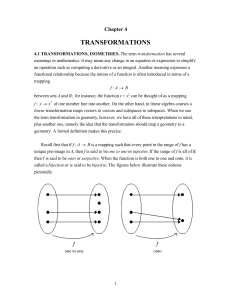
... Also f : A → A, since A, being in R, is zero distance from itself. In all these cases, there was exactly one output for the input. But where does f send the input Q? Since Q is equidistant from A and C, there is not exactly one output for the input Q, but rather two possibilities! Thus our ‘Rule’ do ...
... Also f : A → A, since A, being in R, is zero distance from itself. In all these cases, there was exactly one output for the input. But where does f send the input Q? Since Q is equidistant from A and C, there is not exactly one output for the input Q, but rather two possibilities! Thus our ‘Rule’ do ...





Geometry ELG HS.G.1: Experiment with transformations in the plane.
... (a), it assumes that all four angles made by ℓ and m are right angles. Though this can be deduced as in the last paragraph above, this definition has the advantage of being natural: no one of the four angles is given special status as in the first definition. One disadvantage to this definition is t ...
... (a), it assumes that all four angles made by ℓ and m are right angles. Though this can be deduced as in the last paragraph above, this definition has the advantage of being natural: no one of the four angles is given special status as in the first definition. One disadvantage to this definition is t ...

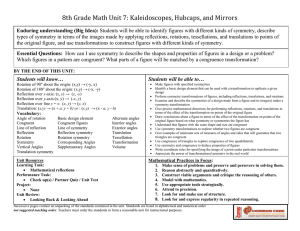
How Congruence Relates to Rotations, Reflections, and Translations
... Look for and make use of structure. (MP.7) ...
... Look for and make use of structure. (MP.7) ...
