





I. Basic Terms - ArtMathOnline
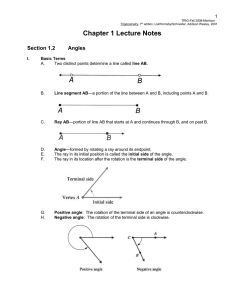
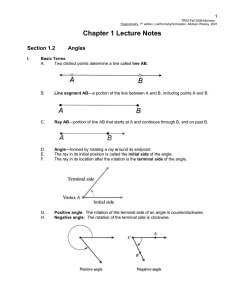
... Example: Hank needs to determine the distance AB across a lake in an east-west direction as shown in the illustration to the right. He can’t measure this distance directly over the water. So, instead, he sets up a situation as shown. He selects the point D from where a straight line to point B stays ...
... Example: Hank needs to determine the distance AB across a lake in an east-west direction as shown in the illustration to the right. He can’t measure this distance directly over the water. So, instead, he sets up a situation as shown. He selects the point D from where a straight line to point B stays ...


Acute triangle: A triangle with all angles less than 90°
... Irregular polygon: A polygon that does not have all sides equal or all angles equal. Convex polygon: A polygon that has all angles less than 180°. Concave polygon: A polygon that has at least one angle greater than 180°. Congruent shapes: Two shapes that match exactly. Formula: A short way to state ...
... Irregular polygon: A polygon that does not have all sides equal or all angles equal. Convex polygon: A polygon that has all angles less than 180°. Concave polygon: A polygon that has at least one angle greater than 180°. Congruent shapes: Two shapes that match exactly. Formula: A short way to state ...









A C E
... symmetry; the fourth (blue cross) figure has four lines of symmetry and rotational symmetry in multiples of 90°; the fifth (red) figure has three lines of symmetry and rotational symmetry in multiples of 120°. ...
... symmetry; the fourth (blue cross) figure has four lines of symmetry and rotational symmetry in multiples of 90°; the fifth (red) figure has three lines of symmetry and rotational symmetry in multiples of 120°. ...



