
A Practical Introduction to Data Structures and Algorithm Analysis
... A data structure is the physical implementation of an ADT. • Each operation associated with the ADT is implemented by one or more subroutines in the implementation. Data structure usually refers to an organization for data in main memory. File structure: an organization for data on peripheral storag ...
... A data structure is the physical implementation of an ADT. • Each operation associated with the ADT is implemented by one or more subroutines in the implementation. Data structure usually refers to an organization for data in main memory. File structure: an organization for data on peripheral storag ...


Data Structures Lab Manual – BE II/IV – I Sem
... A hash function: This is a function that converts a piece of data into an integer. Sometimes we call this integer a hash value. The integer should be at least as big as the hash table. When we store a value in a hash table, we compute its hash value with the hash function, take that value modulo the ...
... A hash function: This is a function that converts a piece of data into an integer. Sometimes we call this integer a hash value. The integer should be at least as big as the hash table. When we store a value in a hash table, we compute its hash value with the hash function, take that value modulo the ...

Chapter 20 Arrays
... An array of Objects, therefore, can hold references of any type: Object[] obj = { "Hello", new Random(), new TrafficLightModel(TrafficLightModel.STOP), new Rational(1, 2) }; Furthermore, since all primitive types have associated wrapper classes, and since primitive values are autoboxed when required ...
... An array of Objects, therefore, can hold references of any type: Object[] obj = { "Hello", new Random(), new TrafficLightModel(TrafficLightModel.STOP), new Rational(1, 2) }; Furthermore, since all primitive types have associated wrapper classes, and since primitive values are autoboxed when required ...
UNIT- V: Sorting: Bubble sort, Merge sort, Insertion Sort, Selection
... -------------------------------------------------------------------------------------------------------------------------------------1. This is faster sorting method among all. 2. Its efficiency is also relatively good. 3. It requires relatively small amount of memory. Disadvantages of quick sort: 1 ...
... -------------------------------------------------------------------------------------------------------------------------------------1. This is faster sorting method among all. 2. Its efficiency is also relatively good. 3. It requires relatively small amount of memory. Disadvantages of quick sort: 1 ...

Data Structures and Analysis - Department of Computer Science
... analysis: what inputs we’re looking at, and how we’re measuring runtime. The final step is what we had initially talked about: compute the average running time over inputs of length n. This often requires some calculation, so let’s get to it. To simplify our calculations even further, we’ll assume t ...
... analysis: what inputs we’re looking at, and how we’re measuring runtime. The final step is what we had initially talked about: compute the average running time over inputs of length n. This often requires some calculation, so let’s get to it. To simplify our calculations even further, we’ll assume t ...

3 Representing Sequences by Arrays and Linked Lists
... require that for each item it, the successor of its predecessor is equal to it and the predecessor of its successor is also equal to it. A sequence of n elements is represented by a ring of n+1 items. There is a special dummy item h, which stores no element. The successor h1 of h stores the first el ...
... require that for each item it, the successor of its predecessor is equal to it and the predecessor of its successor is also equal to it. A sequence of n elements is represented by a ring of n+1 items. There is a special dummy item h, which stores no element. The successor h1 of h stores the first el ...

A Space and Time Efficient Algorithm for Constructing Compressed
... and encode each set of increasing sequence independently using Rice code. The resulting data structure requires only O(n(Hk + 1)) bits for storage when k + 1 ≤ log|Σ| n, while supporting O(1)-time retrieval of any Ψ value [5]. Nevertheless in the remaining paper, we shall assume the above O(n(H0 + 1 ...
... and encode each set of increasing sequence independently using Rice code. The resulting data structure requires only O(n(Hk + 1)) bits for storage when k + 1 ≤ log|Σ| n, while supporting O(1)-time retrieval of any Ψ value [5]. Nevertheless in the remaining paper, we shall assume the above O(n(H0 + 1 ...

Range Majority in Constant Time and Linear Space
... √ space data structures that return the mode of a query range [i..j] in O( n), O(k), O(m), and O(|j − i|) time, respectively, where k denotes the number of distinct elements. Greve et lg n al. [14] proved a lower bound of Ω( lg(sw/n) ) query time for any range mode query data structure that uses s m ...
... √ space data structures that return the mode of a query range [i..j] in O( n), O(k), O(m), and O(|j − i|) time, respectively, where k denotes the number of distinct elements. Greve et lg n al. [14] proved a lower bound of Ω( lg(sw/n) ) query time for any range mode query data structure that uses s m ...
Linear List
... size(): return the list size (i.e., number of elements in the list) get(index): return the indexth element of the list indexO f(x): return the index of the first occurrence of x in the list, return -1 if x is not in the list erase(index): remove the indexth element, elements with higher index have t ...
... size(): return the list size (i.e., number of elements in the list) get(index): return the indexth element of the list indexO f(x): return the index of the first occurrence of x in the list, return -1 if x is not in the list erase(index): remove the indexth element, elements with higher index have t ...
Chapter 24 Implementing Lists, Stacks, Queues, and Priority Queues
... Array is a fixed-size data structure. Once an array is created, its size cannot be changed. Nevertheless, you can still use array to implement dynamic data structures. The trick is to create a new larger array to replace the current array if the current array cannot hold new elements in the list. In ...
... Array is a fixed-size data structure. Once an array is created, its size cannot be changed. Nevertheless, you can still use array to implement dynamic data structures. The trick is to create a new larger array to replace the current array if the current array cannot hold new elements in the list. In ...

Range Majority in Constant Time and Linear Space
... contains two blocks, then the nodes representing these blocks are not siblings in the tree T . Let U be a quadruple consisting of four consecutive blocks, B1 through B4 from T (`), where ` is the level referred to in the previous observation. We associate Q with U if Q contains B2 or B3 ; for conven ...
... contains two blocks, then the nodes representing these blocks are not siblings in the tree T . Let U be a quadruple consisting of four consecutive blocks, B1 through B4 from T (`), where ` is the level referred to in the previous observation. We associate Q with U if Q contains B2 or B3 ; for conven ...
read it here
... the cache becomes full (i.e., when all m cache lines are used), it needs to evict presently loaded cache lines before caching new ones. The evicted cache line is picked according to a cache replacement policy. The most commonly implemented cache replacement policy is LRU (least recently used ), whic ...
... the cache becomes full (i.e., when all m cache lines are used), it needs to evict presently loaded cache lines before caching new ones. The evicted cache line is picked according to a cache replacement policy. The most commonly implemented cache replacement policy is LRU (least recently used ), whic ...

Stratified B-trees and Versioned Dictionaries.
... contains the closest ancestor to v. In the simplest construction, we maintain a per-array B-tree index for the keys in that array, and a Bloom filter on its key set. A query at v involves querying the Bloom filter for each array selected as above, then examining the B-tree in those arrays matching t ...
... contains the closest ancestor to v. In the simplest construction, we maintain a per-array B-tree index for the keys in that array, and a Bloom filter on its key set. A query at v involves querying the Bloom filter for each array selected as above, then examining the B-tree in those arrays matching t ...

Median filtering is equivalent to sorting
... Median filter. We study the following problem, commonly known as the median filter, sliding window median, moving median, running median, rolling median, or median smoothing: • Input: vector (x1 , x2 , . . . , xn ) and window size k. • Output: vector (y1 , y2 , . . . , xn−k+1 ), where yi is the medi ...
... Median filter. We study the following problem, commonly known as the median filter, sliding window median, moving median, running median, rolling median, or median smoothing: • Input: vector (x1 , x2 , . . . , xn ) and window size k. • Output: vector (y1 , y2 , . . . , xn−k+1 ), where yi is the medi ...
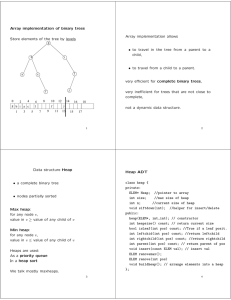
Array implementation of binary trees
... require O(n log2 n) time to sort n records. If n = 10000, n2 = 100000000, n log2 n ≈ 13300, i.e. n log2 n is lower by a factor of 750. If n = 100000, n2 = 10000000000, n log2 n ≈ 1670000, i.e. n log2 n is lower by a factor of ≈ 6000. ...
... require O(n log2 n) time to sort n records. If n = 10000, n2 = 100000000, n log2 n ≈ 13300, i.e. n log2 n is lower by a factor of 750. If n = 100000, n2 = 10000000000, n log2 n ≈ 1670000, i.e. n log2 n is lower by a factor of ≈ 6000. ...
Heaps and PQs
... You are not required to know one specific PQ implementation but you need to understand their general principles that require any Data Structure to allow for: Quick insertion of PQ elements Quick retrieval of an element with the top priority Potential PQ implementations include: ...
... You are not required to know one specific PQ implementation but you need to understand their general principles that require any Data Structure to allow for: Quick insertion of PQ elements Quick retrieval of an element with the top priority Potential PQ implementations include: ...
Bloom filter

A Bloom filter is a space-efficient probabilistic data structure, conceived by Burton Howard Bloom in 1970, that is used to test whether an element is a member of a set. False positive matches are possible, but false negatives are not, thus a Bloom filter has a 100% recall rate. In other words, a query returns either ""possibly in set"" or ""definitely not in set"". Elements can be added to the set, but not removed (though this can be addressed with a ""counting"" filter). The more elements that are added to the set, the larger the probability of false positives.Bloom proposed the technique for applications where the amount of source data would require an impractically large amount of memory if ""conventional"" error-free hashing techniques were applied. He gave the example of a hyphenation algorithm for a dictionary of 500,000 words, out of which 90% follow simple hyphenation rules, but the remaining 10% require expensive disk accesses to retrieve specific hyphenation patterns. With sufficient core memory, an error-free hash could be used to eliminate all unnecessary disk accesses; on the other hand, with limited core memory, Bloom's technique uses a smaller hash area but still eliminates most unnecessary accesses. For example, a hash area only 15% of the size needed by an ideal error-free hash still eliminates 85% of the disk accesses, an 85–15 form of the Pareto principle (Bloom (1970)).More generally, fewer than 10 bits per element are required for a 1% false positive probability, independent of the size or number of elements in the set (Bonomi et al. (2006)).