
Introduction to group theory
... generators ta form the basis of the so-called Lie algebra g associated with the Lie group G. From (C.18) it follows that the fab c determine the multiplication table of the Lie group. Therefore they are called the structure constants of the group (observe that abelian groups have zero structure cons ...
... generators ta form the basis of the so-called Lie algebra g associated with the Lie group G. From (C.18) it follows that the fab c determine the multiplication table of the Lie group. Therefore they are called the structure constants of the group (observe that abelian groups have zero structure cons ...


14. Isomorphism Theorem This section contain the important
... Similarly, the subalgebra L− generated by all L−α for simple α contains all Lβ for β ∈ Φ− . So the subalgebra L" of L generated by all Lα , L−α contains Lβ for all β ∈ Φ. On the other hand hα ∈ [Lα , L−α ]. So, L" also contains all hα . But the hα generate H since the α are a basis for H ∗ . So, L" ...
... Similarly, the subalgebra L− generated by all L−α for simple α contains all Lβ for β ∈ Φ− . So the subalgebra L" of L generated by all Lα , L−α contains Lβ for all β ∈ Φ. On the other hand hα ∈ [Lα , L−α ]. So, L" also contains all hα . But the hα generate H since the α are a basis for H ∗ . So, L" ...

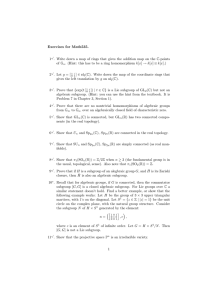
Partial Solution Set, Leon §6.6 6.6.1 Find the matrix associated with
... is positive definite. Now AT A is symmetric (Hermitian and normal), so the (suitably chosen) eigenvectors of A constitute an orthonormal basis for Rn . It follows that for any x ∈ Rn we can express x uniquely as a linear combination of the eigenvectors of A. It suffices to show that if x is an eigen ...
... is positive definite. Now AT A is symmetric (Hermitian and normal), so the (suitably chosen) eigenvectors of A constitute an orthonormal basis for Rn . It follows that for any x ∈ Rn we can express x uniquely as a linear combination of the eigenvectors of A. It suffices to show that if x is an eigen ...



8. The Lie algebra and the exponential map for general Lie groups
... Remark. If X, Y ∈ Lie(G), the bracket [X, Y ] depends only on the values of X and Y in a neighborhood of the identity and so the Lie algebra is already determined by the connected component of the identity of the Lie group. So the part of G beyond the component of the identity does not play any role ...
... Remark. If X, Y ∈ Lie(G), the bracket [X, Y ] depends only on the values of X and Y in a neighborhood of the identity and so the Lie algebra is already determined by the connected component of the identity of the Lie group. So the part of G beyond the component of the identity does not play any role ...

EXISTENCE OF A POSITIVE SOLUTION TO A RIGHT FOCAL
... The recent topological proof and extension of the Leggett-Williams fixed point theorem [3] does not require either of the functional boundaries to be invariant with respect to a functional wedge and its proof uses topological methods instead of axiomatic index theory. Functional fixed point theorems ...
... The recent topological proof and extension of the Leggett-Williams fixed point theorem [3] does not require either of the functional boundaries to be invariant with respect to a functional wedge and its proof uses topological methods instead of axiomatic index theory. Functional fixed point theorems ...






INTRODUCTION TO LIE ALGEBRAS. LECTURE 2. 2. More
... 2.2.2. Example. The Lie algebra gln is isomorphic to the direct product sln × k (k is the one-dimensional algebra). The map from the direct product to gln is given by the formula (a, λ) 7→ a + λI where I is the identity matrix. 2.3. Some calculations. 2.3.1. Ideals in n3 . Quotients Choose a basis f ...
... 2.2.2. Example. The Lie algebra gln is isomorphic to the direct product sln × k (k is the one-dimensional algebra). The map from the direct product to gln is given by the formula (a, λ) 7→ a + λI where I is the identity matrix. 2.3. Some calculations. 2.3.1. Ideals in n3 . Quotients Choose a basis f ...



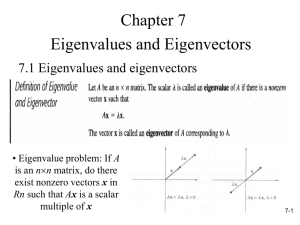
CHAPTER 7
... • Eigenvalues and eigenvectors of linear transformations: A number is called an eigenvalue of a linear tra nsformatio n T : V V if there is a nonzero vector x such that T (x) x. The vector x is called an eigenvecto r of T correspond ing to , and the setof all eigenvecto rs of (with the z ...
... • Eigenvalues and eigenvectors of linear transformations: A number is called an eigenvalue of a linear tra nsformatio n T : V V if there is a nonzero vector x such that T (x) x. The vector x is called an eigenvecto r of T correspond ing to , and the setof all eigenvecto rs of (with the z ...


My talk on Almost Complex Structures
... Proof: Assume for simplicity that we have a standard structure Jc (R2n , ω0 ). It suffices to construct a canonical path between J ∈ Jc (R2n , ω0 ) and J0 . We use the polar decomposition. Let g be the metric corresponding to J. Then gt = g.t + g0 (1 − t) is continuous family of metrics. We can use ...
... Proof: Assume for simplicity that we have a standard structure Jc (R2n , ω0 ). It suffices to construct a canonical path between J ∈ Jc (R2n , ω0 ) and J0 . We use the polar decomposition. Let g be the metric corresponding to J. Then gt = g.t + g0 (1 − t) is continuous family of metrics. We can use ...


Branches of differential geometry
... differentiable manifold equipped with a non-degenerate skew-symmetric bilinear closed 2-form, the symplectic form ω. A diffeomorphism between two symplectic manifolds which preserves the symplectic form is called a symplectomorphism. Non-degenerate skew-symmetric bilinear forms can only exist on eve ...
... differentiable manifold equipped with a non-degenerate skew-symmetric bilinear closed 2-form, the symplectic form ω. A diffeomorphism between two symplectic manifolds which preserves the symplectic form is called a symplectomorphism. Non-degenerate skew-symmetric bilinear forms can only exist on eve ...

