
UNIT-IV 1 Mark questions
... A DC shunt motor supplied at 230V runs at 990 rpm. Calculate the resistance required in series with the armature circuit to reduce the speed to 500rpm assuming that armature current is 25A. Derive the condition for maximum power output of DC motor? Write the applications of DC motors used for variou ...
... A DC shunt motor supplied at 230V runs at 990 rpm. Calculate the resistance required in series with the armature circuit to reduce the speed to 500rpm assuming that armature current is 25A. Derive the condition for maximum power output of DC motor? Write the applications of DC motors used for variou ...

Electrical Motor Starters
... Auxiliary contacts L1 close at the same time as contactor contacts L. The operator may now release the start button since supply to L is maintained through L1. After a time interval which allows the motor to run up to speed, auxiliary contacts L2 and L3 close. Contactor coil S is de-energised and it ...
... Auxiliary contacts L1 close at the same time as contactor contacts L. The operator may now release the start button since supply to L is maintained through L1. After a time interval which allows the motor to run up to speed, auxiliary contacts L2 and L3 close. Contactor coil S is de-energised and it ...

Space Vectors
... have to reach 5.7735V peak but with the revised drive, that 10V peak of output to the windings is achieved with only 5V peak drive coming from the MOSFETs. Rail voltage collision becomes less of an issue. ...
... have to reach 5.7735V peak but with the revised drive, that 10V peak of output to the windings is achieved with only 5V peak drive coming from the MOSFETs. Rail voltage collision becomes less of an issue. ...


Oct
... 1. The arms of a Wheat-stone bridge have the following resistance : AB = 10 , BC = 20 , CD = 30 , DA = 10 . A galvanometer of 40 resistance is connected across BD. Calculate the Potential Difference maintained across AC to cause a current of 3.08 mA (milliamperes) to flow from D to B. 2. A bat ...
... 1. The arms of a Wheat-stone bridge have the following resistance : AB = 10 , BC = 20 , CD = 30 , DA = 10 . A galvanometer of 40 resistance is connected across BD. Calculate the Potential Difference maintained across AC to cause a current of 3.08 mA (milliamperes) to flow from D to B. 2. A bat ...
AV100-750 - Europower Components Ltd
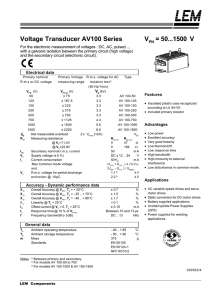
... For the electronic measurement of voltages : DC, AC, pulsed..., with a galvanic isolation between the primary circuit (high voltage) and the secondary circuit (electronic circuit). ...
... For the electronic measurement of voltages : DC, AC, pulsed..., with a galvanic isolation between the primary circuit (high voltage) and the secondary circuit (electronic circuit). ...


A O P
... For which resistance of the photo-resistor will motor spin, and for which will it stop (Rlow or Rhigh)? Correlate your answers to the amount of light (low or high light). ...
... For which resistance of the photo-resistor will motor spin, and for which will it stop (Rlow or Rhigh)? Correlate your answers to the amount of light (low or high light). ...

0. introduction
... ounce-inches. If the output of the motor is slightly under 18.65 W at a certain voltage and an integral ounce-inch value of Q, and if the output decreases or remains nearly constant when an additional ounce-inch of torque is applied, then it will be necessary to apply torque in increments of 0.1 oun ...
... ounce-inches. If the output of the motor is slightly under 18.65 W at a certain voltage and an integral ounce-inch value of Q, and if the output decreases or remains nearly constant when an additional ounce-inch of torque is applied, then it will be necessary to apply torque in increments of 0.1 oun ...


File
... – Service factor (SF) – Marked temperature rise – Voltage – Full load current rating – (NEMA) Code letter ...
... – Service factor (SF) – Marked temperature rise – Voltage – Full load current rating – (NEMA) Code letter ...

datasheet - BatterySpace.com
... The IR trimpot setting determines the degree to which motor speed is held constant as the motor load changes. It is factory set for optimum motor regulation. Use the following procedure to recalibrate the IR COMP setting: 1. Set the IR trimpot to minimum (full CCW). 2. Rotate the speed adjust potent ...
... The IR trimpot setting determines the degree to which motor speed is held constant as the motor load changes. It is factory set for optimum motor regulation. Use the following procedure to recalibrate the IR COMP setting: 1. Set the IR trimpot to minimum (full CCW). 2. Rotate the speed adjust potent ...

BA6482AK
... The waveforms of different steps along the signal path from the Hall devices to the motor driver output are shown in Fig. 16. The Hall amplifiers receive the Hall device voltage signals as differential inputs. Next, by deducting the voltage signal of Hall device 2 from the voltage signal of Hall dev ...
... The waveforms of different steps along the signal path from the Hall devices to the motor driver output are shown in Fig. 16. The Hall amplifiers receive the Hall device voltage signals as differential inputs. Next, by deducting the voltage signal of Hall device 2 from the voltage signal of Hall dev ...



display
... Motor modules will be self-regulated The power distribution board will provide 5V and 12V to the PC104 stack Features: • Over current protection to onboard electronics • Voltage surge protection • Provide regulated aux outputs ( two 12Vdc and two 5Vdc line) • Its scalable by ‘stacking’ additional po ...
... Motor modules will be self-regulated The power distribution board will provide 5V and 12V to the PC104 stack Features: • Over current protection to onboard electronics • Voltage surge protection • Provide regulated aux outputs ( two 12Vdc and two 5Vdc line) • Its scalable by ‘stacking’ additional po ...

Document
... 2.) To calculate the actual motor speed what has to be included in the above formula? slip (120 x f / P) - slip 3.) The majority of electric motors used in general purpose applications in industry today are what NEMA design? NEMA design B 4.) A NEMA design D motor is characterized by very high break ...
... 2.) To calculate the actual motor speed what has to be included in the above formula? slip (120 x f / P) - slip 3.) The majority of electric motors used in general purpose applications in industry today are what NEMA design? NEMA design B 4.) A NEMA design D motor is characterized by very high break ...

Teknologi Elektrik - ENCON
... induced in a conductor if it moves through a magnetic field. • Motor action: A force is induced in a conductor that has a current going through it and placed in a magnetic field • Any DC machine can act either as a generator or as a motor. ...
... induced in a conductor if it moves through a magnetic field. • Motor action: A force is induced in a conductor that has a current going through it and placed in a magnetic field • Any DC machine can act either as a generator or as a motor. ...

Abstract - Induction motor is used in majority of the
... the current coils of other instruments and relays need not be connected directly to high voltage lines. In other words, these instruments and relays are insulated from high voltages. CT’s also step down the current in a known ratio. The use of CT means that relatively small and accurate instruments, ...
... the current coils of other instruments and relays need not be connected directly to high voltage lines. In other words, these instruments and relays are insulated from high voltages. CT’s also step down the current in a known ratio. The use of CT means that relatively small and accurate instruments, ...

iC-LTA/iC-PT Optical Encoder Series
... The photocurrent signals are conditioned by low-noise CMOS amplifiers and can either be comparated or interpolated twice and output through 4 mA push/pull drivers as indexed encoder quadrature signals. Output frequencies of up to 800 kHz are permitted, enabling motors with speeds of up to 20,000 rpm ...
... The photocurrent signals are conditioned by low-noise CMOS amplifiers and can either be comparated or interpolated twice and output through 4 mA push/pull drivers as indexed encoder quadrature signals. Output frequencies of up to 800 kHz are permitted, enabling motors with speeds of up to 20,000 rpm ...

Stepper motor

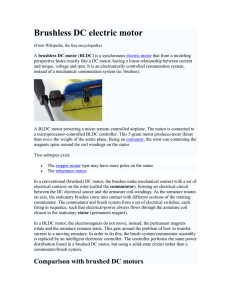
A stepper motor or step motor or stepping motor is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can then be commanded to move and hold at one of these steps without any feedback sensor (an open-loop controller), as long as the motor is carefully sized to the application in respect to torque and speed.Switched reluctance motors are very large stepping motors with a reduced pole count, and generally are closed-loop commutated.