

frequency controlled ac motor drive - Allen
... machines whose speed depends upon applied frequency, pole pair number, and load torque. At a constant supply voltage and frequency, if the effect of temperature variations is disregarded, the motor torque will depend upon slip - Shown in Figure as An. At a positive slip, the squirrel cage machine wi ...
... machines whose speed depends upon applied frequency, pole pair number, and load torque. At a constant supply voltage and frequency, if the effect of temperature variations is disregarded, the motor torque will depend upon slip - Shown in Figure as An. At a positive slip, the squirrel cage machine wi ...

Team Name - University of Colorado Boulder
... • Subsystem testing requires rigid time restraints and an understanding of the time required to complete tasks. Taking into account setbacks and off-ramps. Designing a system would benefit also from an understand as to how it will be constructed. Engineering tasks are best approached by assigning sp ...
... • Subsystem testing requires rigid time restraints and an understanding of the time required to complete tasks. Taking into account setbacks and off-ramps. Designing a system would benefit also from an understand as to how it will be constructed. Engineering tasks are best approached by assigning sp ...


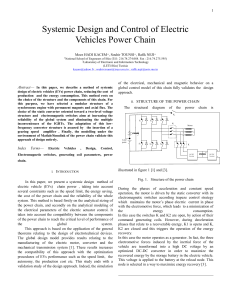
ii. structure of the power chain - International Journal of Scientific
... production and the energy consumption. This method rests on the choice of the structure and the components of this chain. For this purpose, we have selected a modular structure of a synchronous engine with permanent magnets and axial flux. The choice of the static converter oriented toward a two-lev ...
... production and the energy consumption. This method rests on the choice of the structure and the components of this chain. For this purpose, we have selected a modular structure of a synchronous engine with permanent magnets and axial flux. The choice of the static converter oriented toward a two-lev ...
Control Theory 1 - School of Computer Science, University of
... How to apply it to simple mobile robots ...
... How to apply it to simple mobile robots ...




Gamry G750 Potentiostat
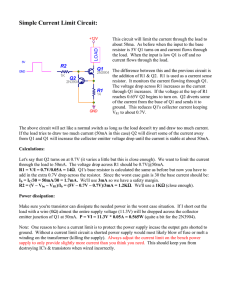
... Scan Limit 1 (V): The lower voltage limit of your scan. The option “vs Eref” should be selected. Scan Limit 2 (V): The upper voltage limit of your scan. The option “vs Eref” should be selected. Final E (V): The potential at which the scan will end. The option “vs Eref” should be selected. Scan rate ...
... Scan Limit 1 (V): The lower voltage limit of your scan. The option “vs Eref” should be selected. Scan Limit 2 (V): The upper voltage limit of your scan. The option “vs Eref” should be selected. Final E (V): The potential at which the scan will end. The option “vs Eref” should be selected. Scan rate ...



II 777 HVR SP B Installation Instructions
... such as motor usage, motor size, environmental factors and tolerance of the motor. The motor manufacturer should be consulted for "HV" and "LV" settings. However, the NEMA MG1 standard recommends that "LV" and "HV" be set to no more than ±10% of the motor's nameplate voltage. The setting can be dete ...
... such as motor usage, motor size, environmental factors and tolerance of the motor. The motor manufacturer should be consulted for "HV" and "LV" settings. However, the NEMA MG1 standard recommends that "LV" and "HV" be set to no more than ±10% of the motor's nameplate voltage. The setting can be dete ...


Consequences of Harmonic Currents and Voltages Generated by
... circuit input current waveform is typically greater than 1.11 times average current. (See further discussion of instrument readings.) Derating or using a low temperature rise generator is a means of compensating for increased heat losses . Of course harmonic currents cause increased resistive losses ...
... circuit input current waveform is typically greater than 1.11 times average current. (See further discussion of instrument readings.) Derating or using a low temperature rise generator is a means of compensating for increased heat losses . Of course harmonic currents cause increased resistive losses ...

The Series RLC Circuit: Group Worksheet Intro Part 1: Resistive
... Pick an ω that is above ω0 where I is appreciably smaller than at resonance, calculate VR using I=VR/R. Calculate the reactance of both the inductor and the capacitor using the calculated current equations (3) and (5). Calculate the phase angle from equation (8). Show calculations. Compare the phase ...
... Pick an ω that is above ω0 where I is appreciably smaller than at resonance, calculate VR using I=VR/R. Calculate the reactance of both the inductor and the capacitor using the calculated current equations (3) and (5). Calculate the phase angle from equation (8). Show calculations. Compare the phase ...
Unit 51: Electrical Technology - News
... • A rotating armature coil passes through a magnetic field that develops between the north and south polarities of permanent magnets or electromagnets. • As the coil rotates, electromagnetic induction causes a current to be induced into the coil. • The current produced is an alternating current. • H ...
... • A rotating armature coil passes through a magnetic field that develops between the north and south polarities of permanent magnets or electromagnets. • As the coil rotates, electromagnetic induction causes a current to be induced into the coil. • The current produced is an alternating current. • H ...
Physics 517/617 Experiment 3 Diodes
... 1) Measure and graph the current through a diode vs the applied voltage for both forward and reserve biasing voltage. Use a DC power supply, zener diode, resistor(s) and multimeter. The forward current in the diode should not exceed 300 mA. P517: Do one part of the next three. P617: Do two parts of ...
... 1) Measure and graph the current through a diode vs the applied voltage for both forward and reserve biasing voltage. Use a DC power supply, zener diode, resistor(s) and multimeter. The forward current in the diode should not exceed 300 mA. P517: Do one part of the next three. P617: Do two parts of ...

Full Document - Ahmet Özkurt`s Homepage
... quadrature encoder with 64 counts per revolution (CPR) of the motor shaft. DC motors are intended for use at 12 V, though in general, these kinds of motors can run at voltages above and below the nominal voltage (they can begin rotating at voltages as low as 1 V). Lower voltages might not be practic ...
... quadrature encoder with 64 counts per revolution (CPR) of the motor shaft. DC motors are intended for use at 12 V, though in general, these kinds of motors can run at voltages above and below the nominal voltage (they can begin rotating at voltages as low as 1 V). Lower voltages might not be practic ...

Stepper motor

A stepper motor or step motor or stepping motor is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can then be commanded to move and hold at one of these steps without any feedback sensor (an open-loop controller), as long as the motor is carefully sized to the application in respect to torque and speed.Switched reluctance motors are very large stepping motors with a reduced pole count, and generally are closed-loop commutated.