
Electrical engineering
... c. Identification of circuit elements and circuits as per drawing. d. Circuit drawing for PCB’s with required accuracy. e. Practice on 1. Multirector(analog and disital type) 2. Low frequency signal generator 3. C.R.O. f. Study of LDR, VDR and thermistor characteristics. g. The following equipments ...
... c. Identification of circuit elements and circuits as per drawing. d. Circuit drawing for PCB’s with required accuracy. e. Practice on 1. Multirector(analog and disital type) 2. Low frequency signal generator 3. C.R.O. f. Study of LDR, VDR and thermistor characteristics. g. The following equipments ...

Reliability in motion
... • Also known as starting inrush, this is the amount of current the motor can be expected to draw under starting conditions when full voltage is applied. • Service Factor - Motor load and current rating when loaded to the service factor on the nameplate of the motor. Base is 1.0 but for example, many ...
... • Also known as starting inrush, this is the amount of current the motor can be expected to draw under starting conditions when full voltage is applied. • Service Factor - Motor load and current rating when loaded to the service factor on the nameplate of the motor. Base is 1.0 but for example, many ...

Motor Sizing Principles
... whose rated torque is slightly above the torque required by the load. The load torque should be between 75%-100% of the rated motor toque with 95% being an ideal choice. ...
... whose rated torque is slightly above the torque required by the load. The load torque should be between 75%-100% of the rated motor toque with 95% being an ideal choice. ...


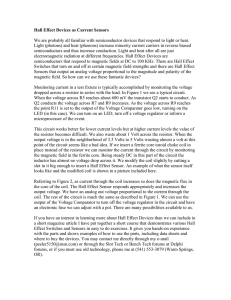
Hall Effect Devices as Current Sensors
... dropped across a resistor in series with the load. In Figure 1 we see a typical circuit. When the voltage across R5 reaches about 600 mV the transistor Q2 starts to conduct. As Q2 conducts the voltage across R7 and R9 increases. As the voltage across R9 reaches the point R11 is set to the output of ...
... dropped across a resistor in series with the load. In Figure 1 we see a typical circuit. When the voltage across R5 reaches about 600 mV the transistor Q2 starts to conduct. As Q2 conducts the voltage across R7 and R9 increases. As the voltage across R9 reaches the point R11 is set to the output of ...


Experiment FT2: Measurement of Inductance and Mutual Inductance
... If the secondary circuit is closed, for example, by connecting a resistor to the terminals, a current I2 will start to flow. By this electromagnetic induction, the electrical energy is transferred from the primary winding to the secondary winding by means of magnetic field coupling. Assuming that th ...
... If the secondary circuit is closed, for example, by connecting a resistor to the terminals, a current I2 will start to flow. By this electromagnetic induction, the electrical energy is transferred from the primary winding to the secondary winding by means of magnetic field coupling. Assuming that th ...

Motor control - Anglia Components
... The rotor of the brush DC motor includes a winding which is fed by a DC voltage source through carbon brushes. The stator circuit comprises a permanent magnet structure (PMDC motor) or a winding. If the stator includes a winding, the latter can be connected to the rotor winding in series or paralle ...
... The rotor of the brush DC motor includes a winding which is fed by a DC voltage source through carbon brushes. The stator circuit comprises a permanent magnet structure (PMDC motor) or a winding. If the stator includes a winding, the latter can be connected to the rotor winding in series or paralle ...

Characteristic Impedance Measurement
... Signal reflection and distortion can be avoided between cables by matching their impedances to each other. The NIM1 standard requires that all input and output device impedances and cables impedances be 50 ohms. But there are times when two cables or devices of two different impedances need to ...
... Signal reflection and distortion can be avoided between cables by matching their impedances to each other. The NIM1 standard requires that all input and output device impedances and cables impedances be 50 ohms. But there are times when two cables or devices of two different impedances need to ...

60ml “TL-CL
... on from one phase winding to the next by operation of 45 means, which are coupled with the rotor and which are mechanically operative in one of the two directions of ro the electronic control circuit which can take the form tation can be provided instead of one of the RC net of a multivibrator or of ...
... on from one phase winding to the next by operation of 45 means, which are coupled with the rotor and which are mechanically operative in one of the two directions of ro the electronic control circuit which can take the form tation can be provided instead of one of the RC net of a multivibrator or of ...


IMPULSE ® •VG+ Series 3 Theory of Operation IMPULSE ® Drive
... tells the motor what to do, then checks to see if it did it, then changes its command to correct for any error.” ...
... tells the motor what to do, then checks to see if it did it, then changes its command to correct for any error.” ...

Full-Text PDF
... presented in this paper. Models were developed with the minimum sophistication needed to obtain useful results of transient case. ...
... presented in this paper. Models were developed with the minimum sophistication needed to obtain useful results of transient case. ...

170M____
... is intended to clearly present comprehensive product data and provide technical information that will help the end user with design applications. Bussmann reserves the right, without notice, to change design or construction of any products and to discontinue or limit distribution of any products. Bu ...
... is intended to clearly present comprehensive product data and provide technical information that will help the end user with design applications. Bussmann reserves the right, without notice, to change design or construction of any products and to discontinue or limit distribution of any products. Bu ...

Download PGR-6800 Datasheet
... functions include overload, phase unbalance, phase loss, phase sequence and undercurrent. The PGR-6800 Pump Protection Relay is ideally suited for applications where operating without load can induce failure. Motor current is monitored and an undercurrent trip occurs when the current drops below a p ...
... functions include overload, phase unbalance, phase loss, phase sequence and undercurrent. The PGR-6800 Pump Protection Relay is ideally suited for applications where operating without load can induce failure. Motor current is monitored and an undercurrent trip occurs when the current drops below a p ...




Brushed DC Motor Basics
... the load is removed, speed will sharply increase. This makes these motors ideally suited for high-torque applications, such as cranes and winches because the current in both the stator and rotor increases under load. Some drawbacks are that they have poor high speed ( high end ) torque characteristi ...
... the load is removed, speed will sharply increase. This makes these motors ideally suited for high-torque applications, such as cranes and winches because the current in both the stator and rotor increases under load. Some drawbacks are that they have poor high speed ( high end ) torque characteristi ...


... electromagnetic-interference problems. These BLDC motors are not limited to household applications, but these are suitable for other applications such as medical equipment, transportation, HVAC, motion control, and many industrial tools. A BLDC motor has three phase windings on the stator and perman ...


Stepper motor

A stepper motor or step motor or stepping motor is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can then be commanded to move and hold at one of these steps without any feedback sensor (an open-loop controller), as long as the motor is carefully sized to the application in respect to torque and speed.Switched reluctance motors are very large stepping motors with a reduced pole count, and generally are closed-loop commutated.