

Power-Factor Controller (PFC) TDA 4862 IC for High Power Factor
... The TDA 4862 is excellent convenient for designing a preconverter in ballasts and switched mode power supplies with sinusoidal line current consumption and a power factor approaching unity. The TDA 4862 controls a boost converter as an active harmonics filter in a discontinuous mode (free oscillatin ...
... The TDA 4862 is excellent convenient for designing a preconverter in ballasts and switched mode power supplies with sinusoidal line current consumption and a power factor approaching unity. The TDA 4862 controls a boost converter as an active harmonics filter in a discontinuous mode (free oscillatin ...



MAX764/MAX765/MAX766 -5V/-12V/-15V or Adjustable, High-Efficiency, Low I DC-DC Inverters
... 1) They can operate with miniature (less than 5mm diameter) surface-mount inductors, because of their 300kHz switching frequency. 2) The current-limited PFM control scheme allows efficiencies exceeding 80% over a wide range of load currents. 3) Maximum quiescent supply current is only 120µA. Figures ...
... 1) They can operate with miniature (less than 5mm diameter) surface-mount inductors, because of their 300kHz switching frequency. 2) The current-limited PFM control scheme allows efficiencies exceeding 80% over a wide range of load currents. 3) Maximum quiescent supply current is only 120µA. Figures ...

D.C Machines
... Brush friction loss Pbf = μ pb AB.Vc μ – Coefficient of friction pb-Brush contact pressure on commutator (N/m2) AB - Total contact area of all brushes (m2) AB =P Ab (for lap winding) = 2 Ab (for wave winding) Vc – Peripheral speed of commutator (m/s) ...
... Brush friction loss Pbf = μ pb AB.Vc μ – Coefficient of friction pb-Brush contact pressure on commutator (N/m2) AB - Total contact area of all brushes (m2) AB =P Ab (for lap winding) = 2 Ab (for wave winding) Vc – Peripheral speed of commutator (m/s) ...

dc machines
... be used as either a motor or a generator. However, applications requiring operation of the DC machine as a generator are limited, while applications requiring the DC machine as a motor are commonplace. DC motors are the obvious choice in applications where DC sources are all that is available (e.g., ...
... be used as either a motor or a generator. However, applications requiring operation of the DC machine as a generator are limited, while applications requiring the DC machine as a motor are commonplace. DC motors are the obvious choice in applications where DC sources are all that is available (e.g., ...

Model 305-3 RV Gen Set Voltage Regulator
... surging, even at no load (slight surging is normal on cold start-up but should go away after a minute or so). A dirty or gummed up carburetor will cause surging. The electric automatic choke must be operating properly so that it does not stick or fail to open, thereby causing the engine to run exces ...
... surging, even at no load (slight surging is normal on cold start-up but should go away after a minute or so). A dirty or gummed up carburetor will cause surging. The electric automatic choke must be operating properly so that it does not stick or fail to open, thereby causing the engine to run exces ...

MAX856–MAX859 3.3V/5V or Adjustable-Output, Step-Up DC-DC Converters _______________General Description
... Note 1: Reverse battery current is measured from the Typical Operating Circuit’s battery input terminal to GND when the battery is connected backwards. A reverse current of 750mA will not exceed the SO or CERDIP package dissipation limits but, if left for an extended time (more than ten minutes), ma ...
... Note 1: Reverse battery current is measured from the Typical Operating Circuit’s battery input terminal to GND when the battery is connected backwards. A reverse current of 750mA will not exceed the SO or CERDIP package dissipation limits but, if left for an extended time (more than ten minutes), ma ...

Power Module Design for an Ultra Efficient Three-Level Abstract :
... circuit’s reverse recovery behavior explains the lower turnon losses. The reverse recovery current through diode D1 boosts the current of transistor T1 at turn-on. The current is reduced during recovery, but the additional energy stored in the parasitic inductance Lparasitic causes an overvoltage at ...
... circuit’s reverse recovery behavior explains the lower turnon losses. The reverse recovery current through diode D1 boosts the current of transistor T1 at turn-on. The current is reduced during recovery, but the additional energy stored in the parasitic inductance Lparasitic causes an overvoltage at ...




UC2853 数据资料 dataSheet 下载
... Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant ...
... Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant ...

Conventionally, wireless-controlled robots use RF circuits,
... A wooden/mica sheet of required dimension is used as the chassis of the land rover. The land rover runs on three wheels, among which both the rear wheels are motor driven and the front wheel is free to rotate in any direction. Drilling machine is employed to make holes of specific diameter at specif ...
... A wooden/mica sheet of required dimension is used as the chassis of the land rover. The land rover runs on three wheels, among which both the rear wheels are motor driven and the front wheel is free to rotate in any direction. Drilling machine is employed to make holes of specific diameter at specif ...


Classic Analog Drives HW Manual
... requires a minimum amount of load inductance to ensure that the DC motor current is properly filtered. The minimum inductance values for different drive types are shown in the individual data sheet specifications. If the drive is operated below its maximum rated voltage, the minimum load inductance ...
... requires a minimum amount of load inductance to ensure that the DC motor current is properly filtered. The minimum inductance values for different drive types are shown in the individual data sheet specifications. If the drive is operated below its maximum rated voltage, the minimum load inductance ...

Proposed Scheme
... fed to the microcontroller. Inside the microcontroller, each phase load current is compared with the rated generator current i.e. 23A for 16KVA generator. This error current of each phase should flow through the ballast of respective phase to balance the generator terminal currents. In order to flow ...
... fed to the microcontroller. Inside the microcontroller, each phase load current is compared with the rated generator current i.e. 23A for 16KVA generator. This error current of each phase should flow through the ballast of respective phase to balance the generator terminal currents. In order to flow ...



BDD Testing Notes
... to place it back in the 8.7 amp tap for as left P.U. test and the in-service tap. This is so you do not need as much current during tests so you do not adjust slope because of a changing polar unit characteristic. If you need to adjust the slope resistor R3, then place the taps on both wdg 1 & wdg 2 ...
... to place it back in the 8.7 amp tap for as left P.U. test and the in-service tap. This is so you do not need as much current during tests so you do not adjust slope because of a changing polar unit characteristic. If you need to adjust the slope resistor R3, then place the taps on both wdg 1 & wdg 2 ...

RevF_093b
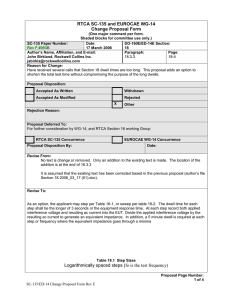
... analog scan rates must be adjusted accordingly. This can be achieved by multiplying the rates (table above) by the factor (3 seconds / tr) where / tr is the response time in seconds. For example, if tr is 30 seconds, (3 seconds / tr) is 0.1. The rate for the 1 kHz to 10 kHz range becomes 3.33 Hz/sec ...
... analog scan rates must be adjusted accordingly. This can be achieved by multiplying the rates (table above) by the factor (3 seconds / tr) where / tr is the response time in seconds. For example, if tr is 30 seconds, (3 seconds / tr) is 0.1. The rate for the 1 kHz to 10 kHz range becomes 3.33 Hz/sec ...

Stepper motor

A stepper motor or step motor or stepping motor is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can then be commanded to move and hold at one of these steps without any feedback sensor (an open-loop controller), as long as the motor is carefully sized to the application in respect to torque and speed.Switched reluctance motors are very large stepping motors with a reduced pole count, and generally are closed-loop commutated.