
Quick Reference.backup.fm
... used for initial startup then the above parameters are the only settings required. ...
... used for initial startup then the above parameters are the only settings required. ...

an efficient locomotion system for autonomous robots
... Read Only Memory), I/O (input/output) – serial and parallel, timers, interrupt and controller. ...
... Read Only Memory), I/O (input/output) – serial and parallel, timers, interrupt and controller. ...


No Slide Title
... different amounts as a function of rotation • Optical sensors generate voltages proportional to the light hitting them. • These voltages are digitize and used to produce absolute position values for a cycle. • Encoders can be designed to produce multiple cycles per revolution. For example a disk can ...
... different amounts as a function of rotation • Optical sensors generate voltages proportional to the light hitting them. • These voltages are digitize and used to produce absolute position values for a cycle. • Encoders can be designed to produce multiple cycles per revolution. For example a disk can ...

Non-Inverting Gain Amplifier
... We will use the term sensor in this class to denote any device used to sense the robot’s environment. A senor is the transducer and any associated electronics needed to interface the transducer to the CBC. ...
... We will use the term sensor in this class to denote any device used to sense the robot’s environment. A senor is the transducer and any associated electronics needed to interface the transducer to the CBC. ...

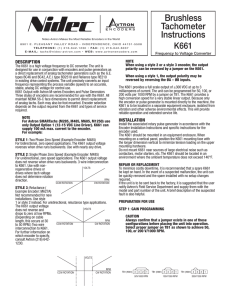
DESCRIPTION
... The K661 provides a full scale output of ±300 VDC at up to 3 milliamperes of current. The unit can be programmed for 50, 100, or 200 volts per 1000 RPM by a jumper on TB1. The K661 provides a high conversion speed for a very stable linear output. Because only the encoder or pulse generator is mounte ...
... The K661 provides a full scale output of ±300 VDC at up to 3 milliamperes of current. The unit can be programmed for 50, 100, or 200 volts per 1000 RPM by a jumper on TB1. The K661 provides a high conversion speed for a very stable linear output. Because only the encoder or pulse generator is mounte ...

H-Bridge
... Decodes PWM (magnitude) & DIR (Sign) signal and Power Amplifier provides an amplified signal with the necessary higher voltages and higher currents required to power the motor. Motion Sensor Usually a rotary shaft encoder that provides the motor’s positional, speed and directional information as fee ...
... Decodes PWM (magnitude) & DIR (Sign) signal and Power Amplifier provides an amplified signal with the necessary higher voltages and higher currents required to power the motor. Motion Sensor Usually a rotary shaft encoder that provides the motor’s positional, speed and directional information as fee ...

PDF
... AMCI’s SMD Series integrated motors offer a wide variety of options for exceptional performance across a range of applications. Options include NEMA size 23 or NEMA size 24 packages, IP67 rating, DLR, SynchroStep technology, encoders, gearboxes, and compatible cord sets. Use the ordering guide below ...
... AMCI’s SMD Series integrated motors offer a wide variety of options for exceptional performance across a range of applications. Options include NEMA size 23 or NEMA size 24 packages, IP67 rating, DLR, SynchroStep technology, encoders, gearboxes, and compatible cord sets. Use the ordering guide below ...

CIP-8 8-Bit Remote Control Encoder/Decoder IC`s
... the data rate selection pin. With A0/BAUD connected to ground, the least significant bit of the 8-bit binary address is 0, and the serial data rate is 2400bps. With this pin at Vcc, the least significant address bit is 1, and the serial data rate is 4800bps. This option allows support for lowend RF ...
... the data rate selection pin. With A0/BAUD connected to ground, the least significant bit of the 8-bit binary address is 0, and the serial data rate is 2400bps. With this pin at Vcc, the least significant address bit is 1, and the serial data rate is 4800bps. This option allows support for lowend RF ...


Implementing Precision High-Speed Linear Motion Control
... The next step is to determine the proper feedback device. As with motors, there are many encoder technologies available to the design engineer such as rotary quadrature encoders, linear encoders, absolute binary encoders and absolute serial encoders to name a few. Given that a linear motor was selec ...
... The next step is to determine the proper feedback device. As with motors, there are many encoder technologies available to the design engineer such as rotary quadrature encoders, linear encoders, absolute binary encoders and absolute serial encoders to name a few. Given that a linear motor was selec ...
Capacitive transducers(cont`d)
... natural binary system but it has got one important drawback. This drawback is that, if-the brushes and segments are not ...
... natural binary system but it has got one important drawback. This drawback is that, if-the brushes and segments are not ...

File - drschlaak.com
... Useful in calculators and any application that requires a 7 segment display. The 7447 is a commonly used IC ...
... Useful in calculators and any application that requires a 7 segment display. The 7447 is a commonly used IC ...

Encoder Products Company offers several index pulse gating
... Encoder Products Company offers several index pulse gating options on most Accu-CoderTM models. The index pulse is also referred to as the reference, marker pulse, or home pulse. This pulse is an individual output channel provided by the encoder that provides a single pulse once per revolution. It s ...
... Encoder Products Company offers several index pulse gating options on most Accu-CoderTM models. The index pulse is also referred to as the reference, marker pulse, or home pulse. This pulse is an individual output channel provided by the encoder that provides a single pulse once per revolution. It s ...


Zebra
... Logic Levels / Voltages: The control logic and encoders in zebra are all 5volt logic. DE0-Nano (and DE0) are 3.3v CMOS. The 5-volt pullups on zebra’s input lines could damage the DE0 fpga. For motor contr lines (output from DE0, input to zebra) a quick hack seemed sufficient: A 3.3v output from the ...
... Logic Levels / Voltages: The control logic and encoders in zebra are all 5volt logic. DE0-Nano (and DE0) are 3.3v CMOS. The 5-volt pullups on zebra’s input lines could damage the DE0 fpga. For motor contr lines (output from DE0, input to zebra) a quick hack seemed sufficient: A 3.3v output from the ...

70100009_Product_Information_MI03-X1-80
... application, battery state of charge algorithm, hour meter, vehicle safety and fault management…) Comprehensive interface concept - CAN 2.0 B port, use for different protocols (CAN, J1939, ...
... application, battery state of charge algorithm, hour meter, vehicle safety and fault management…) Comprehensive interface concept - CAN 2.0 B port, use for different protocols (CAN, J1939, ...

www.rotalink.com
... SSI interface is required to make use of the status information (see SSI section below). 10-bit Single-turn Absolute Position over 16-bit Synchronous Serial Interface (SSI) The serial data transmission for the single-turn encoder makes use of 16-bits. The first 10-bits provide the position data, the ...
... SSI interface is required to make use of the status information (see SSI section below). 10-bit Single-turn Absolute Position over 16-bit Synchronous Serial Interface (SSI) The serial data transmission for the single-turn encoder makes use of 16-bits. The first 10-bits provide the position data, the ...

Document
... Unlike a multiplexer that selects one individual data input line and then sends that data to a single output line or switch, a Digital Encoder more commonly called a Binary Encoder takes ALL its data inputs one at a time and then converts them into a single encoded output. ...
... Unlike a multiplexer that selects one individual data input line and then sends that data to a single output line or switch, a Digital Encoder more commonly called a Binary Encoder takes ALL its data inputs one at a time and then converts them into a single encoded output. ...

V2x Series Encoder Hardware Manual V21, V22, V23, V24
... This equipment has been tested and found to comply with the limits for a class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiat ...
... This equipment has been tested and found to comply with the limits for a class B digital device, pursuant to Part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiat ...

ac motor controller
... A CANopen bus allows easy interconnection of controllers and devices such as displays and driver controls. The CAN bus allows the user to wire the vehicle to best suit vehicle layout since inputs and outputs can be connected to any of the controllers on the vehicle and the desired status is passed o ...
... A CANopen bus allows easy interconnection of controllers and devices such as displays and driver controls. The CAN bus allows the user to wire the vehicle to best suit vehicle layout since inputs and outputs can be connected to any of the controllers on the vehicle and the desired status is passed o ...

Word - University of California, Berkeley
... bits of the comparand with the data contained in that row. Every row that matches the pattern is then passed to the validity block. Since we do not care about rows that contain invalid data (which typically happens when the array is not full), only the valid rows that matched are passed to the prior ...
... bits of the comparand with the data contained in that row. Every row that matches the pattern is then passed to the validity block. Since we do not care about rows that contain invalid data (which typically happens when the array is not full), only the valid rows that matched are passed to the prior ...
Breakthrough mobile technology relies on Renishaw encoders
... Citam Managing Director Mika Harju explains, “The pattern must be accurate to within 5 µm, which is achieved with a combination of rotary and linear movement. The Renishaw scale and readhead on the linear axis is ideal at providing the feedback for this application. The scale is true ‘cut-to-suit’ – ...
... Citam Managing Director Mika Harju explains, “The pattern must be accurate to within 5 µm, which is achieved with a combination of rotary and linear movement. The Renishaw scale and readhead on the linear axis is ideal at providing the feedback for this application. The scale is true ‘cut-to-suit’ – ...

64 Word Content Addressable Memory (CAM)
... bits of the comparand with the data contained in that row. Every row that matches the pattern is then passed to the validity block. Since we do not care about rows that contain invalid data (which typically happens when the array is not full), only the valid rows that matched are passed to the prior ...
... bits of the comparand with the data contained in that row. Every row that matches the pattern is then passed to the validity block. Since we do not care about rows that contain invalid data (which typically happens when the array is not full), only the valid rows that matched are passed to the prior ...
Rotary encoder

A rotary encoder, also called a shaft encoder, is an electro-mechanical device that converts the angular position or motion of a shaft or axle to an analog or digital code.There are two main types: absolute and incremental (relative). The output of absolute encoders indicates the current position of the shaft, making them angle transducers. The output of incremental encoders provides information about the motion of the shaft, which is typically further processed elsewhere into information such as speed, distance, and position.Rotary encoders are used in many applications that require precise shaft unlimited rotation—including industrial controls, robotics, special purpose photographic lenses, computer input devices (such as optomechanical mice and trackballs), controlled stress rheometers, and rotating radar platforms.