
View PDF - CiteSeerX
... xed reference frame. The knowledge of the internal geometry of a camera allows us to obtain directions in 3D space from pixel measurements, and thus the usual Euclidean concepts can be used: the relative positioning of cameras is described by a rigid displacement, and the world is described by met ...
... xed reference frame. The knowledge of the internal geometry of a camera allows us to obtain directions in 3D space from pixel measurements, and thus the usual Euclidean concepts can be used: the relative positioning of cameras is described by a rigid displacement, and the world is described by met ...

Branches of differential geometry
... Finsler geometry has the Finsler manifold as the main object of study — this is a differential manifold with a Finsler metric, i.e. a Banach norm defined on each tangent space. A Finsler metric is a much more general structure than a Riemannian metric. A Finsler structure on a manifold M is a functi ...
... Finsler geometry has the Finsler manifold as the main object of study — this is a differential manifold with a Finsler metric, i.e. a Banach norm defined on each tangent space. A Finsler metric is a much more general structure than a Riemannian metric. A Finsler structure on a manifold M is a functi ...

jeopardy_template_2
... A triangle with an angle of 90% 9n/2 radians). The sides a, b, and c of such a triangle satisfy the ...
... A triangle with an angle of 90% 9n/2 radians). The sides a, b, and c of such a triangle satisfy the ...

Taxicab Geometry
... We can draw a unique line segment between any two points. Any line segment can be continued indefinitely. A circle of any radius and any center can be drawn. Any two right angles are congruent. If a straight line crossing two straight lines makes the interior angles on the same side less tha ...
... We can draw a unique line segment between any two points. Any line segment can be continued indefinitely. A circle of any radius and any center can be drawn. Any two right angles are congruent. If a straight line crossing two straight lines makes the interior angles on the same side less tha ...

Non-Euclidean Geometries
... I-3. If two points lie in a plane, then any line containing those two points lies in that plane I-4. It two distinct planes met, their intersection is a line ...
... I-3. If two points lie in a plane, then any line containing those two points lies in that plane I-4. It two distinct planes met, their intersection is a line ...

Outline - Durham University
... Homogeneous coordinates: a line though the O is determined by a triple of numbers (ξ1 , ξ2 , ξ3 ), where (ξ1 , ξ2 , ξ3 ) 6= (0, 0, 0); triples (ξ1 , ξ2 , ξ3 ) and (λξ1 , λξ2 , λξ3 ) determine the same line, so are considered equivalent. Projective transformations in homogeneous coordinates: A : (ξ1 ...
... Homogeneous coordinates: a line though the O is determined by a triple of numbers (ξ1 , ξ2 , ξ3 ), where (ξ1 , ξ2 , ξ3 ) 6= (0, 0, 0); triples (ξ1 , ξ2 , ξ3 ) and (λξ1 , λξ2 , λξ3 ) determine the same line, so are considered equivalent. Projective transformations in homogeneous coordinates: A : (ξ1 ...

3 Hyperbolic Geometry in Klein`s Model
... In Klein’s model, the hyperbolic reflections are realized quite differently. Indeed, hyperbolic reflections are projective mappings, which leave the circle of infinity ∂D invariant. The developing Klein’s model based on projective geometry is postponed to the subsection about the projective nature of Kl ...
... In Klein’s model, the hyperbolic reflections are realized quite differently. Indeed, hyperbolic reflections are projective mappings, which leave the circle of infinity ∂D invariant. The developing Klein’s model based on projective geometry is postponed to the subsection about the projective nature of Kl ...
Geometry Unit 2 Coordinate Geometry Student Unit Overview Sheet
... G-GPE-7 Use coordinates to compute perimeters of polygons and areas of triangles and rectangles, e.g., using the distance formula. G-GPE-5 Prove the slope criteria for parallel and perpendicular lines and use them to solve geometric problems (e.g., find the equation of a line parallel or perpendicul ...
... G-GPE-7 Use coordinates to compute perimeters of polygons and areas of triangles and rectangles, e.g., using the distance formula. G-GPE-5 Prove the slope criteria for parallel and perpendicular lines and use them to solve geometric problems (e.g., find the equation of a line parallel or perpendicul ...

Geometry 1 - Phoenix Union High School District
... points on a perpendicular bisector of a line segment are exactly those equidistant from the segment’s endpoints. 15. Draw a diagram that fits the following criteria: Draw two lines and a transversal such that 1 and 2 are corresponding angles, 2 and 3 are vertical angles, and 3 and 4 are ...
... points on a perpendicular bisector of a line segment are exactly those equidistant from the segment’s endpoints. 15. Draw a diagram that fits the following criteria: Draw two lines and a transversal such that 1 and 2 are corresponding angles, 2 and 3 are vertical angles, and 3 and 4 are ...

A rigorous deductive approach to elementary Euclidean geometry
... involved later to connect physics with mathematics. The idea of a real number as a possibly infinite decimal expansion then comes in a natural way when measuring a given physical quantity with greater and greater accuracy. Square roots are forced upon us by Pythagoras’ theorem, and computing their n ...
... involved later to connect physics with mathematics. The idea of a real number as a possibly infinite decimal expansion then comes in a natural way when measuring a given physical quantity with greater and greater accuracy. Square roots are forced upon us by Pythagoras’ theorem, and computing their n ...

Geometry 1: Intro to Geometry Introduction to Geometry
... 10. Construct the perpendicular bisector of RP ...
... 10. Construct the perpendicular bisector of RP ...



Handout Week 1
... the geometry we learned through middle and high-school. The postulates may seem very natural and at times even trivial, yet they cannot be derived logically from any reduced set of assumptions. The postulates read: 1. A straight line may be drawn from any given point to any other. 2. A straight line ...
... the geometry we learned through middle and high-school. The postulates may seem very natural and at times even trivial, yet they cannot be derived logically from any reduced set of assumptions. The postulates read: 1. A straight line may be drawn from any given point to any other. 2. A straight line ...
File
... Theorem 1-6: In hyperbolic geometry, the fourth angle of a Lambert quadrilateral is acute, and each side adjacent to the acute angle is longer than the ...
... Theorem 1-6: In hyperbolic geometry, the fourth angle of a Lambert quadrilateral is acute, and each side adjacent to the acute angle is longer than the ...

course title - Salmon School
... Daily assignments may be graded either the next day or on a syllabus situation. Tests will be given at the end of each chapter. Extra credit and enrichment problems will be given randomly throughout the semester. In addition, a participation grade will include positive verbal input, work-ethic, and ...
... Daily assignments may be graded either the next day or on a syllabus situation. Tests will be given at the end of each chapter. Extra credit and enrichment problems will be given randomly throughout the semester. In addition, a participation grade will include positive verbal input, work-ethic, and ...

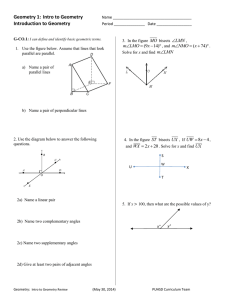
Geometry 1: Intro to Geometry Introduction to Geometry
... vertical angles, and 3 and 4 are corresponding angles. What type of angle pair is 1 and 4? ...
... vertical angles, and 3 and 4 are corresponding angles. What type of angle pair is 1 and 4? ...

Chapter 3
... Remark: In an algebraic context equivalence classes are often called cosets. For example, lines and planes in Euclidean geometry (affine subspaces) are cosets of the underlying linear algebra, the equivalence relation on the vectors being that their difference belongs to the true subspace (line or p ...
... Remark: In an algebraic context equivalence classes are often called cosets. For example, lines and planes in Euclidean geometry (affine subspaces) are cosets of the underlying linear algebra, the equivalence relation on the vectors being that their difference belongs to the true subspace (line or p ...

PDF
... A non-Euclidean geometry is a geometry in which at least one of the axioms from Euclidean geometry fails. Within this entry, only geometries that are considered to be two-dimensional will be considered. The most common non-Euclidean geometries are those in which the parallel postulate fails; i.e., t ...
... A non-Euclidean geometry is a geometry in which at least one of the axioms from Euclidean geometry fails. Within this entry, only geometries that are considered to be two-dimensional will be considered. The most common non-Euclidean geometries are those in which the parallel postulate fails; i.e., t ...
128 [Mar., A SET OF AXIOMS FOR LINE GEOMETRY* 1
... by axioms Ai, A2, A%, E0, Eh E2, E3 and Es of Veblen and Young. § In this paper is given a set of six independent axioms in terms of line as an undefined element and an undefined class of one-to-one correspondences among the lines called collineations. There is introduced but one defined term before ...
... by axioms Ai, A2, A%, E0, Eh E2, E3 and Es of Veblen and Young. § In this paper is given a set of six independent axioms in terms of line as an undefined element and an undefined class of one-to-one correspondences among the lines called collineations. There is introduced but one defined term before ...

Chapter 3
... Remark: In an algebraic context equivalence classes are often called cosets. For example, lines and planes in Euclidean geometry (affine subspaces) are cosets of the underlying linear algebra, the equivalence relation on the vectors being that their difference belongs to the true subspace (line or p ...
... Remark: In an algebraic context equivalence classes are often called cosets. For example, lines and planes in Euclidean geometry (affine subspaces) are cosets of the underlying linear algebra, the equivalence relation on the vectors being that their difference belongs to the true subspace (line or p ...

161_syllabus
... Circle Geometry Cartesian Coordinate System, Vector Geometry Angles in Coordinate Geometry, The Complex Plane Birkhos Axiomatic System for Analytic Geometry Review Midterm # 1 Euclidean Constructions Constructibility Background and History of Non-Euclidean Geometry Models of Hyperbolic Geometry Basi ...
... Circle Geometry Cartesian Coordinate System, Vector Geometry Angles in Coordinate Geometry, The Complex Plane Birkhos Axiomatic System for Analytic Geometry Review Midterm # 1 Euclidean Constructions Constructibility Background and History of Non-Euclidean Geometry Models of Hyperbolic Geometry Basi ...
Homography

In projective geometry, a homography is an isomorphism of projective spaces, induced by an isomorphism of the vector spaces from which they are derived. It is a bijection that maps lines to lines, and thus a collineation. In general, there are collineations which are not homographies, but the fundamental theorem of projective geometry asserts that is not so in the case of real projective spaces of dimension at least two. Synonyms include projectivity, projective transformation, and projective collineation.Historically, homographies (and projective spaces) have been introduced to study perspective and projections in Euclidean geometry, and the term ""homography"", which, etymologically, roughly means ""similar drawing"" date from this time. At the end of 19th century, formal definitions of projective spaces were introduced, which differed from extending Euclidean or affine spaces by adding points at infinity. The term ""projective transformation"" originated in these abstract constructions. These constructions divide into two classes that have been shown to be equivalent. A projective space may be constructed as the set of the lines of a vector space over a given field (the above definition is based on this version); this construction facilitates the definition of projective coordinates and allows using the tools of linear algebra for the study of homographies. The alternative approach consists in defining the projective space through a set of axioms, which do not involve explicitly any field (incidence geometry, see also synthetic geometry); in this context, collineations are easier to define than homographies, and homographies are defined as specific collineations, thus called ""projective collineations"".For sake of simplicity, unless otherwise stated, the projective spaces considered in this article are supposed to be defined over a (commutative) field. Equivalently Pappus's hexagon theorem and Desargues' theorem are supposed to be true. A large part of the results remain true, or may be generalized to projective geometries for which these theorems do not hold.