VECTOR SPACES 1 Definition of a Vector Space
... The uniqueness follows from the argument that if there were two such representations ~v = c1~v1 + c2~v2 + · · · + cn~vn , and ~v = c01~v1 + c02~v2 + · · · + c0n~vn then by subtracting the two equations, we obtain ~0 = (c1 − c01 )~v1 + (c2 − c02 )~v2 + · · · + (cn − c0n )~vn which can only happen if ...
... The uniqueness follows from the argument that if there were two such representations ~v = c1~v1 + c2~v2 + · · · + cn~vn , and ~v = c01~v1 + c02~v2 + · · · + c0n~vn then by subtracting the two equations, we obtain ~0 = (c1 − c01 )~v1 + (c2 − c02 )~v2 + · · · + (cn − c0n )~vn which can only happen if ...



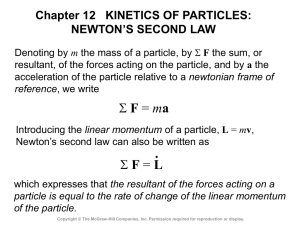











Linear Algebra Application~ Markov Chains
... in Equation 6) results in a new sum of zero for the elements of each column vector. Next, by adding each row (2 through n) to the first row (Williams): ...
... in Equation 6) results in a new sum of zero for the elements of each column vector. Next, by adding each row (2 through n) to the first row (Williams): ...