
ST8024L
... smartcards. It can be placed between the card and the microcontroller with few external components to perform all supply protection and control functions. ST8024LCDR and ST8024LCTR are compatible with ST8024 (with the exception of Vth(ext)rise/fall). ...
... smartcards. It can be placed between the card and the microcontroller with few external components to perform all supply protection and control functions. ST8024LCDR and ST8024LCTR are compatible with ST8024 (with the exception of Vth(ext)rise/fall). ...
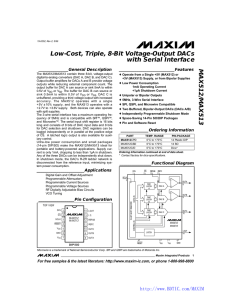
MAX512/MAX513 Low-Cost, Triple, 8-Bit Voltage-Output DACs with Serial Interface _______________General Description
... of two, eliminating the need for a buffer input voltage range to the positive supply rail. In dual-supply mode, the DAC outputs are not attenuated and the buffer is set to unity gain. Although only necessary for negative output voltages, the dual-supply mode may be used even if the desired DAC outpu ...
... of two, eliminating the need for a buffer input voltage range to the positive supply rail. In dual-supply mode, the DAC outputs are not attenuated and the buffer is set to unity gain. Although only necessary for negative output voltages, the dual-supply mode may be used even if the desired DAC outpu ...



AD5243 数据手册DataSheet下载
... INL and DNL are measured at VW with the RDAC configured as a potentiometer divider similar to a voltage output D/A converter. VA = VDD and VB = 0 V. DNL specification limits of ±1 LSB maximum are guaranteed monotonic operating conditions. ...
... INL and DNL are measured at VW with the RDAC configured as a potentiometer divider similar to a voltage output D/A converter. VA = VDD and VB = 0 V. DNL specification limits of ±1 LSB maximum are guaranteed monotonic operating conditions. ...




l06055engf
... The braking torque indicated is a short-duration average torque (which varies with motor loss) when the motor alone is decelerated from 60Hz in the shortest time and is not a continuous regenerative torque. When the motor is decelerated from the frequency higher than the base frequency, the average ...
... The braking torque indicated is a short-duration average torque (which varies with motor loss) when the motor alone is decelerated from 60Hz in the shortest time and is not a continuous regenerative torque. When the motor is decelerated from the frequency higher than the base frequency, the average ...

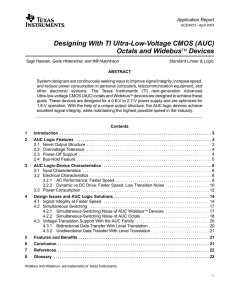
TPS748 1.5-A Low-Dropout Linear Regulator
... pin is left unconnected, the regulator output soft-start ramp time is typically 200 μs. ...
... pin is left unconnected, the regulator output soft-start ramp time is typically 200 μs. ...

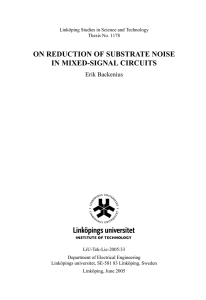
LOW-NOISE ADSL DUAL DIFFERENTIAL RECEIVER THS6062
... The THS6062 is a high-speed differential receiver designed for ADSL data communication systems. Its very low 1.6 nV/√Hz voltage noise provides the high signal-to-noise ratios necessary for the long transmission lengths of ADSL systems over copper telephone lines. In addition, this receiver operates ...
... The THS6062 is a high-speed differential receiver designed for ADSL data communication systems. Its very low 1.6 nV/√Hz voltage noise provides the high signal-to-noise ratios necessary for the long transmission lengths of ADSL systems over copper telephone lines. In addition, this receiver operates ...
MAX1533/MAX1537 High-Efficiency, 5x Output, Main Power-Supply Controllers for Notebook Computers General Description
... The MAX1533/MAX1537 are dual step-down, switchmode power-supply (SMPS) controllers with synchronous rectification, intended for main 5V/3.3V power generation in battery-powered systems. Fixed-frequency operation with optimal interleaving minimizes input ripple current from the lowest input voltages ...
... The MAX1533/MAX1537 are dual step-down, switchmode power-supply (SMPS) controllers with synchronous rectification, intended for main 5V/3.3V power generation in battery-powered systems. Fixed-frequency operation with optimal interleaving minimizes input ripple current from the lowest input voltages ...


fuji igbt–ipm application manual
... • The control input terminals have a standard pitch of 2.54 mm, they are arranged in one line, and connection is possible with one connector for general use. A guide pin makes insertion of the connector for the printed board easy. • The main power source inputs (P, N), the brake output (B), and the ...
... • The control input terminals have a standard pitch of 2.54 mm, they are arranged in one line, and connection is possible with one connector for general use. A guide pin makes insertion of the connector for the printed board easy. • The main power source inputs (P, N), the brake output (B), and the ...

FREQROL-D700 Series
... The braking torque indicated is a short-duration average torque (which varies with motor loss) when the motor alone is decelerated from 60Hz in the shortest time and is not a continuous regenerative torque. When the motor is decelerated from the frequency higher than the base frequency, the average ...
... The braking torque indicated is a short-duration average torque (which varies with motor loss) when the motor alone is decelerated from 60Hz in the shortest time and is not a continuous regenerative torque. When the motor is decelerated from the frequency higher than the base frequency, the average ...
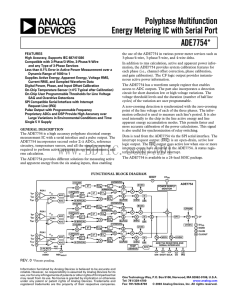
ADE7754 数据手册DataSheet 下载
... and gain calibration). The CF logic output provides instantaneous active power information. The ADE7754 has a waveform sample register that enables access to ADC outputs. The part also incorporates a detection circuit for short duration low or high voltage variations. The voltage threshold levels an ...
... and gain calibration). The CF logic output provides instantaneous active power information. The ADE7754 has a waveform sample register that enables access to ADC outputs. The part also incorporates a detection circuit for short duration low or high voltage variations. The voltage threshold levels an ...

Analog-to-digital converter

An analog-to-digital converter (ADC, A/D, or A to D) is a device that converts a continuous physical quantity (usually voltage) to a digital number that represents the quantity's amplitude.The conversion involves quantization of the input, so it necessarily introduces a small amount of error. Furthermore, instead of continuously performing the conversion, an ADC does the conversion periodically, sampling the input. The result is a sequence of digital values that have been converted from a continuous-time and continuous-amplitude analog signal to a discrete-time and discrete-amplitude digital signal.An ADC is defined by its bandwidth (the range of frequencies it can measure) and its signal to noise ratio (how accurately it can measure a signal relative to the noise it introduces). The actual bandwidth of an ADC is characterized primarily by its sampling rate, and to a lesser extent by how it handles errors such as aliasing. The dynamic range of an ADC is influenced by many factors, including the resolution (the number of output levels it can quantize a signal to), linearity and accuracy (how well the quantization levels match the true analog signal) and jitter (small timing errors that introduce additional noise). The dynamic range of an ADC is often summarized in terms of its effective number of bits (ENOB), the number of bits of each measure it returns that are on average not noise. An ideal ADC has an ENOB equal to its resolution. ADCs are chosen to match the bandwidth and required signal to noise ratio of the signal to be quantized. If an ADC operates at a sampling rate greater than twice the bandwidth of the signal, then perfect reconstruction is possible given an ideal ADC and neglecting quantization error. The presence of quantization error limits the dynamic range of even an ideal ADC, however, if the dynamic range of the ADC exceeds that of the input signal, its effects may be neglected resulting in an essentially perfect digital representation of the input signal.An ADC may also provide an isolated measurement such as an electronic device that converts an input analog voltage or current to a digital number proportional to the magnitude of the voltage or current. However, some non-electronic or only partially electronic devices, such as rotary encoders, can also be considered ADCs. The digital output may use different coding schemes. Typically the digital output will be a two's complement binary number that is proportional to the input, but there are other possibilities. An encoder, for example, might output a Gray code.The inverse operation is performed by a digital-to-analog converter (DAC).