


Range Searching
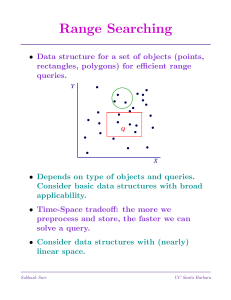
... be done in O(log n) time. • Basic idea: Range tree first finds the set of points lying in [xlo, xhi] as union of O(log n) canonical sets. • Next, each canonical set is searched using the y-tree for range [ylo, yhi]. We locate ylo; then read off points until yhi reached. • Since each set is searched ...
... be done in O(log n) time. • Basic idea: Range tree first finds the set of points lying in [xlo, xhi] as union of O(log n) canonical sets. • Next, each canonical set is searched using the y-tree for range [ylo, yhi]. We locate ylo; then read off points until yhi reached. • Since each set is searched ...

Single-Source Shortest Path on Weighted Graphs
... Stacks, Queue, Linked list, Trees, graphs 4. What is problem definition phase? The first step in solving a problem is to understand problem clearly. Hence, the first phase is the problem definition phase. That is, to extract the task from the problem statement. If the problem is not understood, then ...
... Stacks, Queue, Linked list, Trees, graphs 4. What is problem definition phase? The first step in solving a problem is to understand problem clearly. Hence, the first phase is the problem definition phase. That is, to extract the task from the problem statement. If the problem is not understood, then ...




CS163_Topic11
... – Then take that value and trickle it down the tree until it reaches a node in which it will not be out ...
... – Then take that value and trickle it down the tree until it reaches a node in which it will not be out ...



Data Structures and Other Objects Using C++
... Find the item. If the item has a right child, rearrange the tree: Find smallest item in the right subtree Copy that smallest item onto the one that you want to remove Remove the extra copy of the smallest item (making sure that you keep the tree connected) ...
... Find the item. If the item has a right child, rearrange the tree: Find smallest item in the right subtree Copy that smallest item onto the one that you want to remove Remove the extra copy of the smallest item (making sure that you keep the tree connected) ...





U -F union by size link-by-rank
... algorithm given here, which uses a tree structure, is a considerable improvement over the previous one, and the two algorithms furnish a clear-cut example of the ben:fits which can be realized through the use of such metkods. (Comparison tests have shown that the new method reduces the execution tim ...
... algorithm given here, which uses a tree structure, is a considerable improvement over the previous one, and the two algorithms furnish a clear-cut example of the ben:fits which can be realized through the use of such metkods. (Comparison tests have shown that the new method reduces the execution tim ...



Chapter 19 Java Data Structures
... The root of left (right) subtree of a node is called a left (right) child of the node. A node without children is called a leaf. A special type of binary tree called a binary search tree is often useful. A binary search tree (with no duplicate elements) has the property that for every node in the tr ...
... The root of left (right) subtree of a node is called a left (right) child of the node. A node without children is called a leaf. A special type of binary tree called a binary search tree is often useful. A binary search tree (with no duplicate elements) has the property that for every node in the tr ...




Queues 2
... Heaps Heaps are often used for priority queues Heap is a binary tree Complete – every level full but the last Children are smaller (min)/larger (max) than the parent ...
... Heaps Heaps are often used for priority queues Heap is a binary tree Complete – every level full but the last Children are smaller (min)/larger (max) than the parent ...