VECTOR SPACES OF LINEARIZATIONS FOR MATRIX
... k − 1 in y. Even more, φ is an isomorphism preserving the group additive structure. We omit the trivial proof. Many matrix operations can be interpreted as functional operations via the above described duality between block matrices and their continuous analogues. Bivariate matrix polynomials allow ...
... k − 1 in y. Even more, φ is an isomorphism preserving the group additive structure. We omit the trivial proof. Many matrix operations can be interpreted as functional operations via the above described duality between block matrices and their continuous analogues. Bivariate matrix polynomials allow ...


Non-Commutative Probability Theory
... The idea behind non-commutative geometry is that we can replace a geometric object by an algebra of functions on that object. This commutative algebra will have certain properties defined by the geometry. We then generalise by looking at non-commutative algebras with the same properties. The book [C ...
... The idea behind non-commutative geometry is that we can replace a geometric object by an algebra of functions on that object. This commutative algebra will have certain properties defined by the geometry. We then generalise by looking at non-commutative algebras with the same properties. The book [C ...



SRWColAlg6_06_03
... If A and B are n x n matrices, and if AB = BA = In, then we say that B is the inverse of A, and we write B = A–1. • The concept of the inverse of a matrix is analogous to that of the reciprocal of a real number. ...
... If A and B are n x n matrices, and if AB = BA = In, then we say that B is the inverse of A, and we write B = A–1. • The concept of the inverse of a matrix is analogous to that of the reciprocal of a real number. ...
Hua`s Matrix Equality and Schur Complements - NSUWorks
... A similar proof is obtained using a technique by Embry [7]. If we replace B by A − N in the right-hand side of (21) then, after some cancellation, it becomes −N ∗ [Im + A(I − A∗ A)−1 A∗ ]N , which is the second expression in (23) since now N = A − B. In fact Embry only needed to show (21) could not ...
... A similar proof is obtained using a technique by Embry [7]. If we replace B by A − N in the right-hand side of (21) then, after some cancellation, it becomes −N ∗ [Im + A(I − A∗ A)−1 A∗ ]N , which is the second expression in (23) since now N = A − B. In fact Embry only needed to show (21) could not ...






skew-primitive elements of quantum groups and braided lie algebras
... Yetter-Drinfel'd modules form a category YD in the obvious way (morphisms are the K -module homomorphisms which are also K -comodule homomorphisms). The most interesting structure on YD is given by its tensor products. It is well known that the tensor product M N of two vector spaces which are K - ...
... Yetter-Drinfel'd modules form a category YD in the obvious way (morphisms are the K -module homomorphisms which are also K -comodule homomorphisms). The most interesting structure on YD is given by its tensor products. It is well known that the tensor product M N of two vector spaces which are K - ...

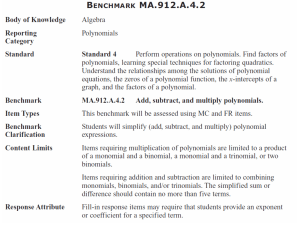
MA.912.A.4.2: Add, subtract, and multiply polynomials.
... Which answer choice is equivalent to the product of the polynomials shown below? (12x + 2)(3x − 6) A. 6(6x2 − 13x − 2) B. (36x2 − 78x) C. 6(6x2 − 11x − 2) D. −6(5x3 − 2) MA.912.A.4.2: Add, subtract, and multiply polynomials. ...
... Which answer choice is equivalent to the product of the polynomials shown below? (12x + 2)(3x − 6) A. 6(6x2 − 13x − 2) B. (36x2 − 78x) C. 6(6x2 − 11x − 2) D. −6(5x3 − 2) MA.912.A.4.2: Add, subtract, and multiply polynomials. ...