
Eigenvalues, diagonalization, and Jordan normal form
... Theorem 8. Every square matrix A is similar to a matrix in Jordan normal form. Proof. Let f (x) = Ax. Let C1 , . . . , Cm be chains of generalized eigenvectors of f forming a basis B of Cn . If C1 = v1 , . . . , vk , then f (v1 ) = λv1 and f (vi ) = λvi + vi−1 for i = 2, . . . , k and some eigenvalu ...
... Theorem 8. Every square matrix A is similar to a matrix in Jordan normal form. Proof. Let f (x) = Ax. Let C1 , . . . , Cm be chains of generalized eigenvectors of f forming a basis B of Cn . If C1 = v1 , . . . , vk , then f (v1 ) = λv1 and f (vi ) = λvi + vi−1 for i = 2, . . . , k and some eigenvalu ...


2D Kinematics Consider a robotic arm. We can send it commands
... columns in A and the number of rows of B must match. In other words, if A is m × n, then B must be n × p. The result of this multiplication would be m × p, where the ith row and the jth column are the dot product of the ith row of A and the jth column of B. Consider, for example, the following multi ...
... columns in A and the number of rows of B must match. In other words, if A is m × n, then B must be n × p. The result of this multiplication would be m × p, where the ith row and the jth column are the dot product of the ith row of A and the jth column of B. Consider, for example, the following multi ...





notes II
... In this notation the length of a vector squared is xT.x. In a pair of orthogonal subspaces, every vector in one subspace is mutually perpendicular to every vector in the other subspace. For example, if the basis vectors {a, b, c, d} for a 4 dimensional space are mutually orthogonal, then a plus b an ...
... In this notation the length of a vector squared is xT.x. In a pair of orthogonal subspaces, every vector in one subspace is mutually perpendicular to every vector in the other subspace. For example, if the basis vectors {a, b, c, d} for a 4 dimensional space are mutually orthogonal, then a plus b an ...



Linear Algebra - John Abbott Home Page
... understanding of the human phenomena in concrete situations Students are strongly advised to seek help from their instructor as soon as they encounter difficulties in the course. Introduction. Linear Algebra is the third Mathematics course in the Social Science Program. It is generally taken in the ...
... understanding of the human phenomena in concrete situations Students are strongly advised to seek help from their instructor as soon as they encounter difficulties in the course. Introduction. Linear Algebra is the third Mathematics course in the Social Science Program. It is generally taken in the ...


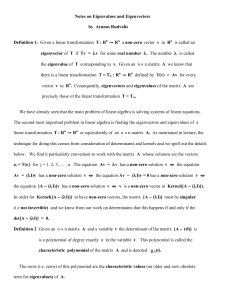
MODULE 11 Topics: Hermitian and symmetric matrices Setting: A is
... 1) Suppose that A has the property A = −A∗ . In this case A is said to be skew-Hermitian. i) Show that all eigenvalues of A have to be purely imaginary. ii) Prove or disprove: The eigenvectors corresponding to distinct eigenvalues of a skew-Hermitian matrix are orthogonal with respect to the complex ...
... 1) Suppose that A has the property A = −A∗ . In this case A is said to be skew-Hermitian. i) Show that all eigenvalues of A have to be purely imaginary. ii) Prove or disprove: The eigenvectors corresponding to distinct eigenvalues of a skew-Hermitian matrix are orthogonal with respect to the complex ...




Matrix Operations
... The diagonal entries of A are 2 and 4, but A is not square; B is a square matrix of size 2 × 2 with diagonal entries 3 and 5; C is a diagonal matrix; D is 3 × 3 identity matrix. The n × n identity matrix is denoted by In (or simply I if its size is understood). We can view matrices as generalization ...
... The diagonal entries of A are 2 and 4, but A is not square; B is a square matrix of size 2 × 2 with diagonal entries 3 and 5; C is a diagonal matrix; D is 3 × 3 identity matrix. The n × n identity matrix is denoted by In (or simply I if its size is understood). We can view matrices as generalization ...





