
Math 2270 - Lecture 33 : Positive Definite Matrices
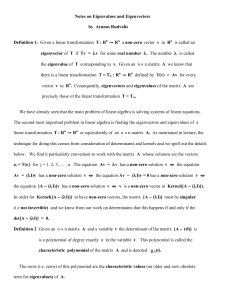
... A matrix is positive definite if it’s symmetric and all its eigenvalues are positive. The thing is, there are a lot of other equivalent ways to define a positive definite matrix. One equivalent definition can be derived using the fact that for a symmetric matrix the signs of the pivots are the signs ...
... A matrix is positive definite if it’s symmetric and all its eigenvalues are positive. The thing is, there are a lot of other equivalent ways to define a positive definite matrix. One equivalent definition can be derived using the fact that for a symmetric matrix the signs of the pivots are the signs ...
Eigenstuff
... easy to see (for example calculation in the 2 × 2 case) that the matrix [ λ 1s1, λ 2s2, … , λ nsn ] can be written as S Λ where Λ is a diagonal matrix whose diagonal entries are the corresponding eigenvalues λ 1, λ 2, λ 3, … , λ n (appearing in the same order as the eigenvectors s1, s2, s3, … , sn a ...
... easy to see (for example calculation in the 2 × 2 case) that the matrix [ λ 1s1, λ 2s2, … , λ nsn ] can be written as S Λ where Λ is a diagonal matrix whose diagonal entries are the corresponding eigenvalues λ 1, λ 2, λ 3, … , λ n (appearing in the same order as the eigenvectors s1, s2, s3, … , sn a ...


Smith-McMillan Form for Multivariable Systems
... zero of the system must be a factor in at least one of the i (s) polynomials. The normal rank of both M (s) and G(s) is r. It is clear from (7) that if any i (s) = 0, then the rank of M (s) drops below r. Therefore, since the ranks of M (s) and G(s) are always equal, a transmission zero of the trans ...
... zero of the system must be a factor in at least one of the i (s) polynomials. The normal rank of both M (s) and G(s) is r. It is clear from (7) that if any i (s) = 0, then the rank of M (s) drops below r. Therefore, since the ranks of M (s) and G(s) are always equal, a transmission zero of the trans ...

3 5 2 2 3 1 3x+5y=2 2x+3y=1 replace with
... Terminology: first non-zero entry of a row = leading entry; leading entry used to zero out a column = pivot. Basic procedure (Gauss-Jordan elimination): find non-zero entry in first column, switch up to first row (E1j ) (pivot in (1,1) position). Use E1 (m) to make first entry a 1, then use E1j (m) opera ...
... Terminology: first non-zero entry of a row = leading entry; leading entry used to zero out a column = pivot. Basic procedure (Gauss-Jordan elimination): find non-zero entry in first column, switch up to first row (E1j ) (pivot in (1,1) position). Use E1 (m) to make first entry a 1, then use E1j (m) opera ...

Introduction to bilinear forms
... We call a bilinear form B nondegenerate if the discriminant of B is nonzero. To be able to apply the properties of the discriminant and nondegeneracy, we must first understand orthogonality. Given vectors v, w ∈ V we say that v is orthogonal to w (denoted v⊥w) if B(v, w) = 0. We would like to descri ...
... We call a bilinear form B nondegenerate if the discriminant of B is nonzero. To be able to apply the properties of the discriminant and nondegeneracy, we must first understand orthogonality. Given vectors v, w ∈ V we say that v is orthogonal to w (denoted v⊥w) if B(v, w) = 0. We would like to descri ...

Matlab Tutorial I
... The former is accomplished with the * operator, just as if you were multiplying two scalars together. The latter is accomplished with the .* operator (a period before the asterisk). So [1 2 3] .* [4 5 6] = [4 10 18] but [1 2 3] * [4 5 6]’ = 32 (note the transpose operator) and [1 2 3] * [4 5 6] is ...
... The former is accomplished with the * operator, just as if you were multiplying two scalars together. The latter is accomplished with the .* operator (a period before the asterisk). So [1 2 3] .* [4 5 6] = [4 10 18] but [1 2 3] * [4 5 6]’ = 32 (note the transpose operator) and [1 2 3] * [4 5 6] is ...


Matrix multiplication: a group-theoretic approach 1 Notation 2
... If there are no z’s then by equating componentwise we get that ∀i ≤ 3, ai +a0i = bi +b0i = 0 and hence si = ti , ∀i ≤ 3. If there are 2 z’s then assuming without loss of generality that J3 = 0 we get that (a1 , b1 )z(a01 , b01 )(a2 , b2 )z(a02 , b02 )(a3 , b3 )(a03 , b03 ) = (a1 , b1 )(b01 , a01 )(b ...
... If there are no z’s then by equating componentwise we get that ∀i ≤ 3, ai +a0i = bi +b0i = 0 and hence si = ti , ∀i ≤ 3. If there are 2 z’s then assuming without loss of generality that J3 = 0 we get that (a1 , b1 )z(a01 , b01 )(a2 , b2 )z(a02 , b02 )(a3 , b3 )(a03 , b03 ) = (a1 , b1 )(b01 , a01 )(b ...

Math 22 Final Exam 1 1. (36 points) Determine if the following
... 4. (9 points) Let −1 and 1 be eigenvalues of a matrix A. Suppose u1 and u2 are linearly independent eigenvectors of A corresponding to −1, and suppose w1 and w2 are linearly independent eigenvectors of A corresponding to 1. Show that {u1 , u2 , w1, w2 } is a linearly independent set. ANS: Suppose c1 ...
... 4. (9 points) Let −1 and 1 be eigenvalues of a matrix A. Suppose u1 and u2 are linearly independent eigenvectors of A corresponding to −1, and suppose w1 and w2 are linearly independent eigenvectors of A corresponding to 1. Show that {u1 , u2 , w1, w2 } is a linearly independent set. ANS: Suppose c1 ...

Introduction to Systems and General Solutions to Systems
... More details are contained in §4.1 of the text, but here is a brief review of basic properties of matrices and vectors: 1. Addition, Subtraction, and Scalar Multiplication: Matrices and vectors of the same size can be added or subtracted by adding or subtracting the individual components. Multiplica ...
... More details are contained in §4.1 of the text, but here is a brief review of basic properties of matrices and vectors: 1. Addition, Subtraction, and Scalar Multiplication: Matrices and vectors of the same size can be added or subtracted by adding or subtracting the individual components. Multiplica ...

Matrix Algebra
... having to enunciate rules of vector algebra alongside those of matrix algebra. Matrix Addition. If A = [aij ] and B = [bij ] are two matrices of order m × n, then their sum is the matrix C = [cij ] whose generic element is cij = aij + bij . The sum of A and B is defined only if the two matrices have ...
... having to enunciate rules of vector algebra alongside those of matrix algebra. Matrix Addition. If A = [aij ] and B = [bij ] are two matrices of order m × n, then their sum is the matrix C = [cij ] whose generic element is cij = aij + bij . The sum of A and B is defined only if the two matrices have ...

Iterative methods to solve linear systems, steepest descent
... While computing the exact solution by hand would be a tedious task, it is a simple matter to find an approximate solution. Roughly speaking, we expect the behavior of our system to be governed by the “large” diagonal entries of the matrix A, so if we just pretend that all off-diagonal entries are zero ...
... While computing the exact solution by hand would be a tedious task, it is a simple matter to find an approximate solution. Roughly speaking, we expect the behavior of our system to be governed by the “large” diagonal entries of the matrix A, so if we just pretend that all off-diagonal entries are zero ...



APPENDIX Matrix Algebra
... They are called identity matrices, because any matrix multiplied with an identify matrix equals itself. The diagonal entries of a matrix are the entries where the column and row number are the same. The trace of a n × n matrix is the sum of all the diagonal entries. In other words, for n × n matrix ...
... They are called identity matrices, because any matrix multiplied with an identify matrix equals itself. The diagonal entries of a matrix are the entries where the column and row number are the same. The trace of a n × n matrix is the sum of all the diagonal entries. In other words, for n × n matrix ...


Talk - IBM Research
... [F, M, AHK]: If for any fixed pair of unit vectors x,y, a random d x d matrix M satisfies Pr[|xT M y| = O(ε)] > 1-exp(-d), then for every unit vector x, |xTMx| = O(ε) • We apply this to M = (SA)T SA-Id • Set δ = exp(-d): – For any x,y with probability 1-exp(-d): |SA(x+y)|2 = (1±ε)|A(x+y)|2 |SAx|2 = ...
... [F, M, AHK]: If for any fixed pair of unit vectors x,y, a random d x d matrix M satisfies Pr[|xT M y| = O(ε)] > 1-exp(-d), then for every unit vector x, |xTMx| = O(ε) • We apply this to M = (SA)T SA-Id • Set δ = exp(-d): – For any x,y with probability 1-exp(-d): |SA(x+y)|2 = (1±ε)|A(x+y)|2 |SAx|2 = ...

ECO4112F Section 5 Eigenvalues and eigenvectors
... (4). Since S is invertible the vectors x1 , ..., xn are linearly independent: in particular none of them is the zero-vector. Hence by (4), x1 , ..., xn are n linearly independent eigenvectors of A. Proposition 2 If x1 , ..., xk are eigenvectors corresponding to k different eigenvalues of the n × n m ...
... (4). Since S is invertible the vectors x1 , ..., xn are linearly independent: in particular none of them is the zero-vector. Hence by (4), x1 , ..., xn are n linearly independent eigenvectors of A. Proposition 2 If x1 , ..., xk are eigenvectors corresponding to k different eigenvalues of the n × n m ...

Elements of Matrix Algebra
... matrices both A B and B A are defined. Remark 3. The product of two matrices is in general not commutative, i.e. A B 6= B A. ...
... matrices both A B and B A are defined. Remark 3. The product of two matrices is in general not commutative, i.e. A B 6= B A. ...

cs140-13-stencilCGmatvecgraph
... Conjugate gradient in general • CG can be used to solve any system Ax = b, if … • The matrix A is symmetric (aij = aji) … • … and positive definite (all eigenvalues > 0). • Symmetric positive definite matrices occur a lot in scientific computing & data analysis! • But usually the matrix isn’t just ...
... Conjugate gradient in general • CG can be used to solve any system Ax = b, if … • The matrix A is symmetric (aij = aji) … • … and positive definite (all eigenvalues > 0). • Symmetric positive definite matrices occur a lot in scientific computing & data analysis! • But usually the matrix isn’t just ...

NOTES ON LINEAR NON-AUTONOMOUS SYSTEMS 1. General
... independent and if every vector in V can be expressed as a linear combination of vectors in S. We can define the dimension of a particular vector space V to be the number of elements in any basis of V . A vector space is called finite-dimensional if is has a finite basis. Theorem 1.2. if the complex ...
... independent and if every vector in V can be expressed as a linear combination of vectors in S. We can define the dimension of a particular vector space V to be the number of elements in any basis of V . A vector space is called finite-dimensional if is has a finite basis. Theorem 1.2. if the complex ...

