The influence of robots on the human society
... with the focus on the three studied time periods of robot development: inception period (1950 – 1970), development period (1970 – 2000) and innovation period (2000 – future). By investigating scientific literature and mass-media belonging to the studied periods we can underline how the existence of ...
... with the focus on the three studied time periods of robot development: inception period (1950 – 1970), development period (1970 – 2000) and innovation period (2000 – future). By investigating scientific literature and mass-media belonging to the studied periods we can underline how the existence of ...

The Symbol Grounding Problem Remains Unsolved
... inside the robot who doesn’t understand any Chinese, but who can deftly follow (à la a computer program) the rulebook and thereby give outside observers the impression that the robot understands Chinese.5 As Harnad puts it when summarizing the CRA for purposes of presenting SGP: Searle’s simple dem ...
... inside the robot who doesn’t understand any Chinese, but who can deftly follow (à la a computer program) the rulebook and thereby give outside observers the impression that the robot understands Chinese.5 As Harnad puts it when summarizing the CRA for purposes of presenting SGP: Searle’s simple dem ...

Borregos RoboCup Standard Platform League 2010 Team
... There are two ways for building motions, the first one is using hard coded sequences and the other one is directly controlling via an API the movement of each of the servo motors. Both methods include advantages and disadvantages. Hard coded sequences can be programmed by recording positions from th ...
... There are two ways for building motions, the first one is using hard coded sequences and the other one is directly controlling via an API the movement of each of the servo motors. Both methods include advantages and disadvantages. Hard coded sequences can be programmed by recording positions from th ...
Robotic-fall05-4 - Computer Engineering
... Differential steering means that the two (or more) wheels can be steered ...
... Differential steering means that the two (or more) wheels can be steered ...
intelligent robots: the question of embodiment
... increase the accuracy of strictly structured, exacting, and continuous quantifications, is not the only possibility. This may only provide a digital solution to an analogue problem, and consequently suffers from ever increasing complexity. Physical embodiment necessitates the use of approximate sol ...
... increase the accuracy of strictly structured, exacting, and continuous quantifications, is not the only possibility. This may only provide a digital solution to an analogue problem, and consequently suffers from ever increasing complexity. Physical embodiment necessitates the use of approximate sol ...

Three Years of Using Robots in the Artificial Intelligence Course
... students who took one test and not the other. We cannot draw any definitive conclusions because of the small sample size, but the numbers are encouraging. On our evaluation of the first project, 11 students responded (class size was 12). Respondents rated the various aspects of the project as follow ...
... students who took one test and not the other. We cannot draw any definitive conclusions because of the small sample size, but the numbers are encouraging. On our evaluation of the first project, 11 students responded (class size was 12). Respondents rated the various aspects of the project as follow ...

kapor mitch speaks
... just as unlikely as realizing the dreams of Artificial Intelligence has been--gender being as complex and intractable a "problem" as human intelligence. At the end of his essay, Turing outlines two paths for producing machines that will be able to „compete with men in all purely intellectual fields“ ...
... just as unlikely as realizing the dreams of Artificial Intelligence has been--gender being as complex and intractable a "problem" as human intelligence. At the end of his essay, Turing outlines two paths for producing machines that will be able to „compete with men in all purely intellectual fields“ ...
KANTRA: Human-Machine Interaction for Intelligent Robots
... Although natural language processing and robotics constitute two major areas of AI, they have been studied rather independently. Only a few works are concerned with natural language access for human-machine-interaction and communication. Sondheimer [Sondheimer 76] focuses on the problem of spatial r ...
... Although natural language processing and robotics constitute two major areas of AI, they have been studied rather independently. Only a few works are concerned with natural language access for human-machine-interaction and communication. Sondheimer [Sondheimer 76] focuses on the problem of spatial r ...
Cognitive Robotics - Cognitive Science Department
... with higher level cognitive functions that involve reasoning, for example, about goals, perception, actions, the mental states of other ...
... with higher level cognitive functions that involve reasoning, for example, about goals, perception, actions, the mental states of other ...
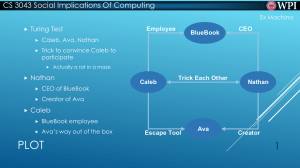
File
... CS 3043 Social Implications Of Computing [1] Becket Mufson, Building BlueBook, http://thecreatorsproject.vice.com/blog/building-bluebook-the-designbehind-ex-machina-google(10/2/2015) ...
... CS 3043 Social Implications Of Computing [1] Becket Mufson, Building BlueBook, http://thecreatorsproject.vice.com/blog/building-bluebook-the-designbehind-ex-machina-google(10/2/2015) ...

A Hierarchy of Reactive Behaviors Handles Complexity
... concentrate. It is not useful to take this decision at a rate of 30Hz based on a snapshot of the most recent sensor readings. The position of the defense has to be determined only from time to time, e.g. every second, on the basis of the average positions of the attacking robots during the immediate ...
... concentrate. It is not useful to take this decision at a rate of 30Hz based on a snapshot of the most recent sensor readings. The position of the defense has to be determined only from time to time, e.g. every second, on the basis of the average positions of the attacking robots during the immediate ...
Intelligence without representation* Rodney A. Brooks
... set of simple assertions deduced from the real data by humans. The problems of recognition, spatial understanding, dealing with sensor noise, partial models, etc. are all ignored. These problems are relegated to the realm of input black boxes. Psychophysical evidence suggests they are all intimately ...
... set of simple assertions deduced from the real data by humans. The problems of recognition, spatial understanding, dealing with sensor noise, partial models, etc. are all ignored. These problems are relegated to the realm of input black boxes. Psychophysical evidence suggests they are all intimately ...

Soarian™ User Interface
... • Differences in interaction between anthropomorphic and non-anthropomorphic robots • Children with autism improve their social interaction skills and imitation skills when interacting with robots • https://www.youtube.com/watch?v=Fp8kndY5E84 • Some studies find that humanoid robots are overwhelming ...
... • Differences in interaction between anthropomorphic and non-anthropomorphic robots • Children with autism improve their social interaction skills and imitation skills when interacting with robots • https://www.youtube.com/watch?v=Fp8kndY5E84 • Some studies find that humanoid robots are overwhelming ...

Anthropomorphism: Opportunities and Challenges
... Futurama and the movie Robot and Frank comes to mind as the glowing exceptions. The stories presented in the media that focus on robots can be categorized along the questions whether the the body and/or the mind of the robot is similar to humans. If we take Mr. Data again as an example, he does look ...
... Futurama and the movie Robot and Frank comes to mind as the glowing exceptions. The stories presented in the media that focus on robots can be categorized along the questions whether the the body and/or the mind of the robot is similar to humans. If we take Mr. Data again as an example, he does look ...

Toward a General Logicist Methodology for Engineering Ethically
... As3 A robot must protect its own existence, as long as such protection does not conflict with the First or Second Law. ...
... As3 A robot must protect its own existence, as long as such protection does not conflict with the First or Second Law. ...
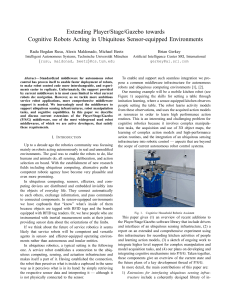
Extending Player/Stage/Gazebo towards Cognitive
... sensor/actuator hardware, and location within a network. In other words, a researcher should be able to: write a control program in any programming language, structure the program in the best way for the application at hand, run the program on any computer (especially low-power embedded systems), ma ...
... sensor/actuator hardware, and location within a network. In other words, a researcher should be able to: write a control program in any programming language, structure the program in the best way for the application at hand, run the program on any computer (especially low-power embedded systems), ma ...

Subdimensional Expansion and Optimal Task Reassignment
... that must be added to Γ0 by exploiting lower bounds on optimal path cost that are placed by assignments in Γ0 on similar assignments. Let f (γ(t)) be the minimal f-value of all vertices in the open list of γ at the start of planning step t, which is a lower bound of the cost of the optimal path for ...
... that must be added to Γ0 by exploiting lower bounds on optimal path cost that are placed by assignments in Γ0 on similar assignments. Let f (γ(t)) be the minimal f-value of all vertices in the open list of γ at the start of planning step t, which is a lower bound of the cost of the optimal path for ...
Soarian™ User Interface
... • Human-robot interaction (HRI) • The interdisciplinary study of interaction dynamics between humans and robots • Robots name first used by Capek’s in the play R.U.R. • http://www.youtube.com/watch?v=mEG7MhltHWk • Robots roles in today’s society • factory automation • service applications • medical ...
... • Human-robot interaction (HRI) • The interdisciplinary study of interaction dynamics between humans and robots • Robots name first used by Capek’s in the play R.U.R. • http://www.youtube.com/watch?v=mEG7MhltHWk • Robots roles in today’s society • factory automation • service applications • medical ...

A Neural Network Based Navigation for Intelligent Autonomous
... knowledge representation for an implicit one based on acquisitions of intelligent behaviours with its environments, they have to orient themselves, explore their environments autonomously, recover from failure, and perform whole families of tasks in real-time. However, the mobile robot is appropriat ...
... knowledge representation for an implicit one based on acquisitions of intelligent behaviours with its environments, they have to orient themselves, explore their environments autonomously, recover from failure, and perform whole families of tasks in real-time. However, the mobile robot is appropriat ...

Anthropomorphism and The Social Robot
... machine could think, Alan Turing came up in 1950 with what has become well known as the Turing Test [8]. The test is based on whether a machine could trick a person into believing they were chatting with another person via computer or at least not be sure that it was ...
... machine could think, Alan Turing came up in 1950 with what has become well known as the Turing Test [8]. The test is based on whether a machine could trick a person into believing they were chatting with another person via computer or at least not be sure that it was ...
presentation
... (Agre & Chapman, 1987) AI has generally interpreted the organized nature of everyday activity in terms of plan-following. Nobody could doubt that people often make and follow plans. But the complexity, uncertainty, and immediacy of the real world require a central role for moment-to-moment improvisa ...
... (Agre & Chapman, 1987) AI has generally interpreted the organized nature of everyday activity in terms of plan-following. Nobody could doubt that people often make and follow plans. But the complexity, uncertainty, and immediacy of the real world require a central role for moment-to-moment improvisa ...

Cooperative Mobile Robotics
... task; and (3) insight into social sciences (organization theory, economics), life sciences (theoretical biology, animal ethology) and cognitive science (psychology, learning, artificial intelligence) may be derived from multi-robot experimental systems. The study of multiple robots naturally extends ...
... task; and (3) insight into social sciences (organization theory, economics), life sciences (theoretical biology, animal ethology) and cognitive science (psychology, learning, artificial intelligence) may be derived from multi-robot experimental systems. The study of multiple robots naturally extends ...

Learning Concepts by Interaction
... several episodes of pairs of behaviors. Each episode was represented by a time series of the distance d between the agents. An episode ended when the agents touched each other or the distance between the agents exceeded a threshold. Delay coordinate embeddings were constructed for each episode, the ...
... several episodes of pairs of behaviors. Each episode was represented by a time series of the distance d between the agents. An episode ended when the agents touched each other or the distance between the agents exceeded a threshold. Delay coordinate embeddings were constructed for each episode, the ...

Intelligent Robot Based on Synaptic Plasticity Web Site: www.ijaiem.org Email:
... Similarly, in our work we first show that shining light in front of and or behind the robot elicits no response but pressing the push button causes the robot to move forward or backward. We then press the button while shining the light on the robot and the neural network programmed into the robot ca ...
... Similarly, in our work we first show that shining light in front of and or behind the robot elicits no response but pressing the push button causes the robot to move forward or backward. We then press the button while shining the light on the robot and the neural network programmed into the robot ca ...
Robot

A robot is a mechanical or virtual artificial agent, usually an electro-mechanical machine that is guided by a computer program or electronic circuitry. Robots can be autonomous or semi-autonomous and range from humanoids such as Honda's Advanced Step in Innovative Mobility (ASIMO) and TOSY's TOSY Ping Pong Playing Robot (TOPIO) to industrial robots, medical operating robots, patent assist robots, dog therapy robots, collectively programmed swarm robots, UAV drones such as General Atomics MQ-1 Predator, and even microscopic nano robots. By mimicking a lifelike appearance or automating movements, a robot may convey a sense of intelligence or thought of its own.The branch of technology that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing is robotics. These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics. These robots have also created a newer branch of robotics: soft robotics.From the time of ancient civilization there have been many accounts of user-configurable automated devices and even automata resembling animals and humans, designed primarily as entertainment. As mechanical techniques developed through the Industrial age, there appeared more practical applications such as automated machines, remote-control and wireless remote-control.The word 'robot' was first used to denote a fictional humanoid in a 1921 play R.U.R. by the Czech writer, Karel Čapek. Electronics evolved into the driving force of development with the advent of the first electronic autonomous robots created by William Grey Walter in Bristol, England in 1948. The first digital and programmable robot was invented by George Devol in 1954 and was named the Unimate. It was sold to General Motors in 1961 where it was used to lift pieces of hot metal from die casting machines at the Inland Fisher Guide Plant in the West Trenton section of Ewing Township, New Jersey.Robots have replaced humans in performing repetitive and dangerous tasks which humans prefer not to do, or are unable to do because of size limitations, or which take place in extreme environments such as outer space or the bottom of the sea.There are concerns about the increasing use of robots and their role in society. Robots are blamed for rising unemployment as they replace workers in increasing numbers of functions. The use of robots in military combat raises ethical concerns. The possibilities of robot autonomy and potential repercussions have been addressed in fiction and may be a realistic concern in the future.