


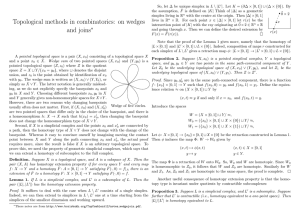
Notes on wedges and joins
... basepoint. Whereas it easy to convince oneself by imagining moving the contact point between X and Y along the path connecting x0 and x00 , the actual proof requires more, since the result is false if X is an arbitrary topological space. To prove this, we need the property of geometric simplicial co ...
... basepoint. Whereas it easy to convince oneself by imagining moving the contact point between X and Y along the path connecting x0 and x00 , the actual proof requires more, since the result is false if X is an arbitrary topological space. To prove this, we need the property of geometric simplicial co ...



1.6 Smooth functions and partitions of unity
... Proposition 2.1. For an n-manifold M, the set T M has a natural topology and smooth structure which make it a 2n-manifold, and make π : T M −→ M a smooth map. Proof. Any chart (U, ϕ) for M defines a bijection T ϕ(U) ∼ = U × Rn −→ π −1 (U) via (p, v ) 7→ (U, ϕ, v ). Using this, we induce a smooth man ...
... Proposition 2.1. For an n-manifold M, the set T M has a natural topology and smooth structure which make it a 2n-manifold, and make π : T M −→ M a smooth map. Proof. Any chart (U, ϕ) for M defines a bijection T ϕ(U) ∼ = U × Rn −→ π −1 (U) via (p, v ) 7→ (U, ϕ, v ). Using this, we induce a smooth man ...



Math 8306, Algebraic Topology Homework 12 Due in-class on Wednesday, December 3
... Due in-class on Wednesday, December 3 1. Show that if a principal bundle P → B has a section, then there is a homeomorphism to the trivial principal bundle: P ∼ = B × G as right G-spaces. 2. Let G and H be topological groups. Suppose P1 → B is a principal Gbundle and P2 → B is a principal H-bundle. ...
... Due in-class on Wednesday, December 3 1. Show that if a principal bundle P → B has a section, then there is a homeomorphism to the trivial principal bundle: P ∼ = B × G as right G-spaces. 2. Let G and H be topological groups. Suppose P1 → B is a principal Gbundle and P2 → B is a principal H-bundle. ...



22. The Quotient Topology Defn: Let X and Y be topological spaces
... Defn: Let X and Y be topological spaces; let p : X → Y be a surjective map. The map p is a quotient map if U is open in Y if and only if p−1 (U ) is open in X. Defn: C ⊂ X is saturated with respect to p if p−1 ({y}) ∩ C 6= ∅ implies p−1 ({y}) ⊂ C. That is, C is saturated if there exists a set D ⊂ Y ...
... Defn: Let X and Y be topological spaces; let p : X → Y be a surjective map. The map p is a quotient map if U is open in Y if and only if p−1 (U ) is open in X. Defn: C ⊂ X is saturated with respect to p if p−1 ({y}) ∩ C 6= ∅ implies p−1 ({y}) ⊂ C. That is, C is saturated if there exists a set D ⊂ Y ...





1 Overview 2 Sheaves on Topological Spaces
... In other words, for each U , f ∗ determines a ring homomorphism fU∗ : OY (U ) → OX (f −1 (U )) . Proof (sketch). If X is quasiprojective and Y = Pn , continuity was proven at the end of Section 4.2. If Y ⊂ Pn is only quasiprojective, then the composition X → Y ,→ Pn is regular, hence continuous. Si ...
... In other words, for each U , f ∗ determines a ring homomorphism fU∗ : OY (U ) → OX (f −1 (U )) . Proof (sketch). If X is quasiprojective and Y = Pn , continuity was proven at the end of Section 4.2. If Y ⊂ Pn is only quasiprojective, then the composition X → Y ,→ Pn is regular, hence continuous. Si ...




“TOPICS IN MODERN GEOMETRY” TOPOLOGY Introduction This
... In particular this means that many familiar functions Rn → Rm are continuous, such as polynomials3, exponentials, trigonometric functions, etc. Contrasting that given above, we make the following definition, which looks similar but is rather different in practice - so be careful! Definition 2.3. A m ...
... In particular this means that many familiar functions Rn → Rm are continuous, such as polynomials3, exponentials, trigonometric functions, etc. Contrasting that given above, we make the following definition, which looks similar but is rather different in practice - so be careful! Definition 2.3. A m ...



General topology

In mathematics, general topology is the branch of topology that deals with the basic set-theoretic definitions and constructions used in topology. It is the foundation of most other branches of topology, including differential topology, geometric topology, and algebraic topology. Another name for general topology is point-set topology.The fundamental concepts in point-set topology are continuity, compactness, and connectedness: Continuous functions, intuitively, take nearby points to nearby points. Compact sets are those that can be covered by finitely many sets of arbitrarily small size. Connected sets are sets that cannot be divided into two pieces that are far apart. The words 'nearby', 'arbitrarily small', and 'far apart' can all be made precise by using open sets, as described below. If we change the definition of 'open set', we change what continuous functions, compact sets, and connected sets are. Each choice of definition for 'open set' is called a topology. A set with a topology is called a topological space.Metric spaces are an important class of topological spaces where distances can be assigned a number called a metric. Having a metric simplifies many proofs, and many of the most common topological spaces are metric spaces.