
Extremal properties of ray-nonsingular matrices
... submatrices A[ ; ÿ) and A( ; ÿ) are de ned analogously. If x is an m×1 column vector, then we write x[ ] instead of x[ ; {1}]. ...
... submatrices A[ ; ÿ) and A( ; ÿ) are de ned analogously. If x is an m×1 column vector, then we write x[ ] instead of x[ ; {1}]. ...
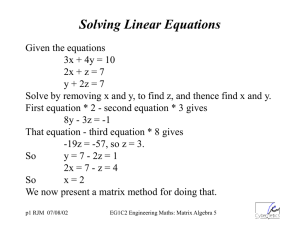



MATH 304 Linear Algebra Lecture 13: Span. Spanning
... Consider the set L of all linear combinations r1 v1 + r2 v2 + · · · + rn vn , where r1 , r2 , . . . , rn ∈ R. Theorem L is a subspace of V . Proof: First of all, L is not empty. For example, 0 = 0v1 + 0v2 + · · · + 0vn belongs to L. The set L is closed under addition since (r1 v1 +r2 v2 + · · · +rn ...
... Consider the set L of all linear combinations r1 v1 + r2 v2 + · · · + rn vn , where r1 , r2 , . . . , rn ∈ R. Theorem L is a subspace of V . Proof: First of all, L is not empty. For example, 0 = 0v1 + 0v2 + · · · + 0vn belongs to L. The set L is closed under addition since (r1 v1 +r2 v2 + · · · +rn ...

Notes, p 93-95
... The word ‘quadric’ implies that (5) has order 2, so not all of A, B, C, D, E, F are zero. Just as we did for conics in L23.1, one can list all the different types of quadrics; whilst there were 8 types of conics there are 15 types of quadrics. However, we shall only consider the more interesting case ...
... The word ‘quadric’ implies that (5) has order 2, so not all of A, B, C, D, E, F are zero. Just as we did for conics in L23.1, one can list all the different types of quadrics; whilst there were 8 types of conics there are 15 types of quadrics. However, we shall only consider the more interesting case ...



Eigenvalues and Eigenvectors
... are seeking non–trivial solutions, v, of this homogeneous system. From the theory that we have been studying in this course, we know that the above system will have non–trivial solutions if and only if its coefficient matrix, A I n , is not invertible. This will be true if and only if detA I ...
... are seeking non–trivial solutions, v, of this homogeneous system. From the theory that we have been studying in this course, we know that the above system will have non–trivial solutions if and only if its coefficient matrix, A I n , is not invertible. This will be true if and only if detA I ...

9. Numerical linear algebra background
... Matrix structure and algorithm complexity cost (execution time) of solving Ax = b with A ∈ Rn×n • for general methods, grows as n3 • less if A is structured (banded, sparse, Toeplitz, . . . ) flop counts • flop (floating-point operation): one addition, subtraction, multiplication, or division of two ...
... Matrix structure and algorithm complexity cost (execution time) of solving Ax = b with A ∈ Rn×n • for general methods, grows as n3 • less if A is structured (banded, sparse, Toeplitz, . . . ) flop counts • flop (floating-point operation): one addition, subtraction, multiplication, or division of two ...

Chapter 1 - Princeton University Press
... By issuing the focus asset b the bank commits itself to pay different amounts of money in different states of the world and thus it enters into a risky position. Hedging is a simultaneous purchase of another portfolio that reduces this risk, and a perfect hedge is a portfolio that eliminates the ris ...
... By issuing the focus asset b the bank commits itself to pay different amounts of money in different states of the world and thus it enters into a risky position. Hedging is a simultaneous purchase of another portfolio that reduces this risk, and a perfect hedge is a portfolio that eliminates the ris ...

LAB 2: Linear Equations and Matrix Algebra Preliminaries
... that semicolons appear in this formula before the zeros, so that x ∈ R5 and the last two components of x are zero. ...
... that semicolons appear in this formula before the zeros, so that x ∈ R5 and the last two components of x are zero. ...

On Positive Integer Powers of Toeplitz Matrices
... Obviously, any power of a Toeplitz matrix of order n = 1 is naturally a Toeplitz matrix, and any power of a scalar matrix which is a diagonal matrix whose diagonal elements are the same scalar is also a scalar matrix that is naturally a Toeplitz matrix. So we only need to consider Toeplitz matrices ...
... Obviously, any power of a Toeplitz matrix of order n = 1 is naturally a Toeplitz matrix, and any power of a scalar matrix which is a diagonal matrix whose diagonal elements are the same scalar is also a scalar matrix that is naturally a Toeplitz matrix. So we only need to consider Toeplitz matrices ...

ON THE CONJECTURE O OF GGI FOR G/P 1. INTRODUCTION Let
... sγ := wsi w−1 and the coroot γ ∨ := w(αi∨ ), which are independent of the choices the choices of w, i. There is a unique element of maximal length in W , denoted by w0 . Then the opposite Borel subgroup B − is written as B − = w0 Bw0 . Let WP be the subgroup of W generated by the generators si with ...
... sγ := wsi w−1 and the coroot γ ∨ := w(αi∨ ), which are independent of the choices the choices of w, i. There is a unique element of maximal length in W , denoted by w0 . Then the opposite Borel subgroup B − is written as B − = w0 Bw0 . Let WP be the subgroup of W generated by the generators si with ...

Linear Combinations and Linear Independence – Chapter 2 of
... Theorem 2. If A is an m × n matrix with columns a1 , a2 , . . . , an ∈ Rm , x ∈ Rn , and b ∈ Rm , then the matrix equation Ax = b has the same solution as the vector equation x1 a1 + x2 a2 + · · · xn an =[ b, which has the same]solution set as the system of linear equations whose augmented matrix is ...
... Theorem 2. If A is an m × n matrix with columns a1 , a2 , . . . , an ∈ Rm , x ∈ Rn , and b ∈ Rm , then the matrix equation Ax = b has the same solution as the vector equation x1 a1 + x2 a2 + · · · xn an =[ b, which has the same]solution set as the system of linear equations whose augmented matrix is ...

homework 11
... 8.1 #13 We wish to show that the vector P −1~v is an eigenvector of the matrix P −1 AP , with the same eigenvalue λ. (P −1 AP )(P −1~v ) = (P −1 A)(P P −1 )(~v ) (by associativity of matrix multiplication) = (P −1 A)(In )(~v ) (by the defining property of the inverse) = (P −1 A)(~v ) (since the iden ...
... 8.1 #13 We wish to show that the vector P −1~v is an eigenvector of the matrix P −1 AP , with the same eigenvalue λ. (P −1 AP )(P −1~v ) = (P −1 A)(P P −1 )(~v ) (by associativity of matrix multiplication) = (P −1 A)(In )(~v ) (by the defining property of the inverse) = (P −1 A)(~v ) (since the iden ...

Apprentice Linear Algebra, 3rd day, 07/06/05
... Note that since rotations preserve orientation, while reflections reverse it, these two possibilities are mutually exclusive. We will call transformations which preserve orientation sense preserving, while those that do not preserve orientation will be called sense reversing. Use the following Lemma ...
... Note that since rotations preserve orientation, while reflections reverse it, these two possibilities are mutually exclusive. We will call transformations which preserve orientation sense preserving, while those that do not preserve orientation will be called sense reversing. Use the following Lemma ...

The Sine Transform Operator in the Banach Space of
... In this section, we discuss some spectral properties of the sine transform operator s. The proof of the following Lemma is similar to that of Theorem 1 in Chan, Jin and Yeung [4] or that of Theorem 2 in Huckle [11]. Lemma 3.1. For An ∈ Fn×n , we have λmin (An ) ≤ λmin (s(An )) ≤ λmax (s(An )) ≤ λmax ...
... In this section, we discuss some spectral properties of the sine transform operator s. The proof of the following Lemma is similar to that of Theorem 1 in Chan, Jin and Yeung [4] or that of Theorem 2 in Huckle [11]. Lemma 3.1. For An ∈ Fn×n , we have λmin (An ) ≤ λmin (s(An )) ≤ λmax (s(An )) ≤ λmax ...

9. Numerical linear algebra background
... Matrix structure and algorithm complexity cost (execution time) of solving Ax = b with A ∈ Rn×n • for general methods, grows as n3 • less if A is structured (banded, sparse, Toeplitz, . . . ) flop counts • flop (floating-point operation): one addition, subtraction, multiplication, or division of tw ...
... Matrix structure and algorithm complexity cost (execution time) of solving Ax = b with A ∈ Rn×n • for general methods, grows as n3 • less if A is structured (banded, sparse, Toeplitz, . . . ) flop counts • flop (floating-point operation): one addition, subtraction, multiplication, or division of tw ...



8 Finite-difference methods for BVPs
... solution of the linear system (8.4), which (the system) approximates the BVP (8.1). In this section, we will consider the issue of solving (8.4) in an efficient manner. The key fact that will allow us to do so is the tridiagonal form of A; that is, A has nonzero entries only on the main diagonal and ...
... solution of the linear system (8.4), which (the system) approximates the BVP (8.1). In this section, we will consider the issue of solving (8.4) in an efficient manner. The key fact that will allow us to do so is the tridiagonal form of A; that is, A has nonzero entries only on the main diagonal and ...

Eigenvalues and Eigenvectors 1 Invariant subspaces
... there exists a basis for V such that M(T ) is upper triangular with respect to this basis. Proof. We proceed by induction on dim V . If dim V = 1 there is nothing to prove. Hence assume that dim V = n > 1 and we have proved the result of the theorem for all T ∈ L(W, W ), where W is a complex vector ...
... there exists a basis for V such that M(T ) is upper triangular with respect to this basis. Proof. We proceed by induction on dim V . If dim V = 1 there is nothing to prove. Hence assume that dim V = n > 1 and we have proved the result of the theorem for all T ∈ L(W, W ), where W is a complex vector ...
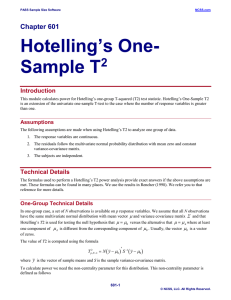
Hotelling`s One
... This option specifies one or more values for the probability of a type-I error. A type-I error occurs when a true null hypothesis is rejected. In this procedure, a type-I error occurs when you reject the null hypothesis of equal means when in fact the means are equal. Values must be between zero and ...
... This option specifies one or more values for the probability of a type-I error. A type-I error occurs when a true null hypothesis is rejected. In this procedure, a type-I error occurs when you reject the null hypothesis of equal means when in fact the means are equal. Values must be between zero and ...
