




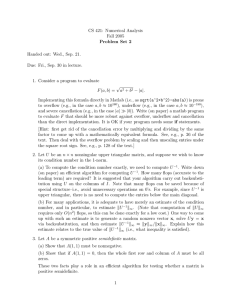








Properties of the Trace and Matrix Derivatives
... λ̄xT x = (Ax)T x = xT AT x = xT Ax = λxT x. Thus, all the eigenvalues are real. Now, we suppose we have at least one eigenvector v 6= 0 of A. Consider a space W of vectors orthogonal to v. We then have that, for w ∈ W , (Aw)T v = wT AT v = wT Av = λwT v = 0. Thus, we have a set of vectors W that, wh ...
... λ̄xT x = (Ax)T x = xT AT x = xT Ax = λxT x. Thus, all the eigenvalues are real. Now, we suppose we have at least one eigenvector v 6= 0 of A. Consider a space W of vectors orthogonal to v. We then have that, for w ∈ W , (Aw)T v = wT AT v = wT Av = λwT v = 0. Thus, we have a set of vectors W that, wh ...




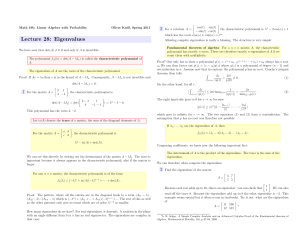
Matrix Vocabulary
... The identity matrix is a matrix consisting of 1’s and 0’s. The ones are found along the diagonal of the matrix starting in the top right corner. ...
... The identity matrix is a matrix consisting of 1’s and 0’s. The ones are found along the diagonal of the matrix starting in the top right corner. ...



Algebra Wksht 26 - TMW Media Group
... both equations for y, the number of cake servings, and graph them with the following WINDOW limits: xmin=ymin=0, xmax=125, ymax=250.] 3. The dimension (or size) of a matrix is said to be mxn, where m is the number of rows and n is the number of columns. ...
... both equations for y, the number of cake servings, and graph them with the following WINDOW limits: xmin=ymin=0, xmax=125, ymax=250.] 3. The dimension (or size) of a matrix is said to be mxn, where m is the number of rows and n is the number of columns. ...

