




Math 8502 — Homework I
... where σ > 0, b > 0, r > 0 are parameters. a. Find all the equilibrium points. For which values of the parameters are they non-degenerate? For which values of the parameters are they hyperbolic and what are the dimensions of the stable and unstable manifolds? b. Show that the z-axis is an invariant s ...
... where σ > 0, b > 0, r > 0 are parameters. a. Find all the equilibrium points. For which values of the parameters are they non-degenerate? For which values of the parameters are they hyperbolic and what are the dimensions of the stable and unstable manifolds? b. Show that the z-axis is an invariant s ...



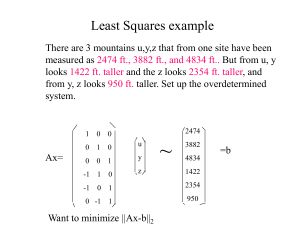
leastsquares
... •Does not require decomposition of matrix •Good for large sparse problem-like PET •Iterative method that requires matrix vector multiplication by A and AT each iteration •In exact arithmetic for n variables guaranteed to converge in n iterations- so 2 iterations for the exponential fit and 3 iterati ...
... •Does not require decomposition of matrix •Good for large sparse problem-like PET •Iterative method that requires matrix vector multiplication by A and AT each iteration •In exact arithmetic for n variables guaranteed to converge in n iterations- so 2 iterations for the exponential fit and 3 iterati ...






Factoring 2x2 Matrices with Determinant of
... The matrix has a dominant right column, therefore we multiply by . The product matrix has a dominant left column and therefore we multiply by . The product matrix of that has a dominant left column, thus we multiply by again. The product matrix again has a dominant left column, and so we multiply by ...
... The matrix has a dominant right column, therefore we multiply by . The product matrix has a dominant left column and therefore we multiply by . The product matrix of that has a dominant left column, thus we multiply by again. The product matrix again has a dominant left column, and so we multiply by ...





Matrices and their Shapes - University of California, Berkeley
... More generally, if A = [aij ] for i = 1; :::; K and j = 1; :::; L; then A0 = [aji ] for j = 1; :::; L and i = 1; :::; J: A matrix that is unchanged if its rows and columns are interchanged – that is, a matrix that is the same as its transpose –is called a symmetric matrix. If a matrix is symmetric, ...
... More generally, if A = [aij ] for i = 1; :::; K and j = 1; :::; L; then A0 = [aji ] for j = 1; :::; L and i = 1; :::; J: A matrix that is unchanged if its rows and columns are interchanged – that is, a matrix that is the same as its transpose –is called a symmetric matrix. If a matrix is symmetric, ...



Chapter 2 Solving Linear Systems
... The size of A-1 is the same as A and A A-1 = I = A-1 A Any Matrix times its own inverse is just the appropriately sized identity matrix ...
... The size of A-1 is the same as A and A A-1 = I = A-1 A Any Matrix times its own inverse is just the appropriately sized identity matrix ...
