



AN4058, BLDC Motor Control with Hall Effect Sensors Using the
... These control parameters require sensors. The Hall effect sensors that are used to detect the position of the rotor are also used to detect speed by measuring the time it takes for the sensors to switch. An input capture channel from the microcontroller timer is used to measure the length of a pulse ...
... These control parameters require sensors. The Hall effect sensors that are used to detect the position of the rotor are also used to detect speed by measuring the time it takes for the sensors to switch. An input capture channel from the microcontroller timer is used to measure the length of a pulse ...


Triple Differential Driver With Output Pull-Down AD8133
... The power dissipated in the package (PD) is the sum of the quiescent power dissipation and the power dissipated in the package due to the load drive for all outputs. The quiescent power is the voltage between the supply pins (VS) times the quiescent current (IS). The load current consists of differe ...
... The power dissipated in the package (PD) is the sum of the quiescent power dissipation and the power dissipated in the package due to the load drive for all outputs. The quiescent power is the voltage between the supply pins (VS) times the quiescent current (IS). The load current consists of differe ...

TPS51117 Single Synchronous Step-Down
... controller is dedicated for the operation of the Adaptive On-Time D-CAP mode. This mode provides ease-of-use, low external component count, and fast transient response. Auto-skip mode for high efficiency down to the milliampere load range, or PWM-only mode for low-noise operation is selectable. ...
... controller is dedicated for the operation of the Adaptive On-Time D-CAP mode. This mode provides ease-of-use, low external component count, and fast transient response. Auto-skip mode for high efficiency down to the milliampere load range, or PWM-only mode for low-noise operation is selectable. ...

MAX1426 10-Bit, 10Msps ADC General Description Features
... The MAX1426 10-bit, monolithic analog-to-digital converter (ADC) is capable of a 10Msps sampling rate. This device features an internal track-and-hold (T/H) amplifier for excellent dynamic performance; at the same time, it minimizes the number of external components. Low input capacitance of only 8p ...
... The MAX1426 10-bit, monolithic analog-to-digital converter (ADC) is capable of a 10Msps sampling rate. This device features an internal track-and-hold (T/H) amplifier for excellent dynamic performance; at the same time, it minimizes the number of external components. Low input capacitance of only 8p ...





thesis
... The new design is an undersampling successive-approximation analog-to-digital converter with small, low device count components, many of which were borrowed from other parts of the equalizer design. The comparator, voltage reference generator, and integration of the system into the equalizer were co ...
... The new design is an undersampling successive-approximation analog-to-digital converter with small, low device count components, many of which were borrowed from other parts of the equalizer design. The comparator, voltage reference generator, and integration of the system into the equalizer were co ...


AM512B - angular magnetic encoder IC
... The controller interrogates the AM512B for its positional value by sending a pulse train to the Clock input. The Clock signal must always start from high. The first high/low transition (point 1) stores the current position data in a parallel/ serial converter and the monoflop is triggered. With each ...
... The controller interrogates the AM512B for its positional value by sending a pulse train to the Clock input. The Clock signal must always start from high. The first high/low transition (point 1) stores the current position data in a parallel/ serial converter and the monoflop is triggered. With each ...

IOSR Journal of VLSI and Signal Processing (IOSR-JVSP)
... only obtainable by the nmos transistor. Where a control signal is applied to the gate of nmos transistors, another data signal is applied to the source of nmos transistor. There are many sorts of PTL techniques that anticipated solving the problems. Transmission Gate (TG) uses to realize complex log ...
... only obtainable by the nmos transistor. Where a control signal is applied to the gate of nmos transistors, another data signal is applied to the source of nmos transistor. There are many sorts of PTL techniques that anticipated solving the problems. Transmission Gate (TG) uses to realize complex log ...

PCA9624 1. General description 8-bit Fm+ I
... The Software Reset (SWRST) Call allows the master to perform a reset of the PCA9624 through the I2C-bus, identical to the Power-On Reset (POR) that initializes the registers to their default state causing the outputs to be set HIGH (LED off). This allows an easy and quick way to reconfigure all devi ...
... The Software Reset (SWRST) Call allows the master to perform a reset of the PCA9624 through the I2C-bus, identical to the Power-On Reset (POR) that initializes the registers to their default state causing the outputs to be set HIGH (LED off). This allows an easy and quick way to reconfigure all devi ...
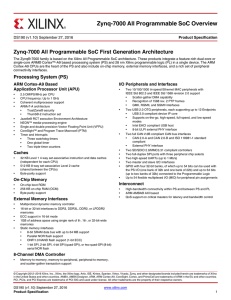
Zynq-7000 All Programmable SoC Overview (DS190)
... The Zynq-7000 architecture enables implementation of custom logic in the PL and custom software in the PS. It allows for the realization of unique and differentiated system functions. The integration of the PS with the PL allows levels of performance that two-chip solutions (e.g., an ASSP with an FP ...
... The Zynq-7000 architecture enables implementation of custom logic in the PL and custom software in the PS. It allows for the realization of unique and differentiated system functions. The integration of the PS with the PL allows levels of performance that two-chip solutions (e.g., an ASSP with an FP ...

W.S. Chang, T.A. Parlikar, M.D. Seeman, D.J. Perreault, J.G. Kassakian, and T.A. Keim, “A New Electromagnetic Valve Actuator,” 2002 IEEE Workshop on Power Electronics in Transportation, Auburn Hills, MI, October 2002, pp. 109-118.
... the shape of these cams is determined by considering a tradeoff between engine speed, power, and torque requirements, as well as vehicle fuel consumption. This optimization results in an engine that is highly efficient only at certain operating conditions [4], [5]. Instead, if the engine valves are ...
... the shape of these cams is determined by considering a tradeoff between engine speed, power, and torque requirements, as well as vehicle fuel consumption. This optimization results in an engine that is highly efficient only at certain operating conditions [4], [5]. Instead, if the engine valves are ...

Phase Detector
... provides a periodic waveform which is at the same exact frequency as the input signal, except for a finite difference qo, which is the phase difference necessary to generate Ve to keep the PLL in lock. ...
... provides a periodic waveform which is at the same exact frequency as the input signal, except for a finite difference qo, which is the phase difference necessary to generate Ve to keep the PLL in lock. ...
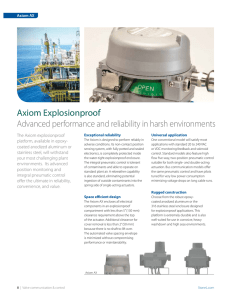
Axiom AX Brochure
... The same Axiom model is suitable for both single-acting and doubleacting actuators. And the rebreather capability for single-acting is also standard. Field configuration may be made by conveniently removing and reinserting the pneumatic plug for the appropriate actuator type. Spring return actuator ...
... The same Axiom model is suitable for both single-acting and doubleacting actuators. And the rebreather capability for single-acting is also standard. Field configuration may be made by conveniently removing and reinserting the pneumatic plug for the appropriate actuator type. Spring return actuator ...

EC3020 - EWS International
... The controller checks the conductivity of the water and if this exceeds a settable limit value, performs the following actions: - In case of single filter systems, switches to “No Service”. The Service valve is closed and, once the cylinder is exchanged, the system must be switched on by hand using ...
... The controller checks the conductivity of the water and if this exceeds a settable limit value, performs the following actions: - In case of single filter systems, switches to “No Service”. The Service valve is closed and, once the cylinder is exchanged, the system must be switched on by hand using ...

FEATURES BASIC BLOCK DIAGRAM
... Input = 25 MHz, output = 125 MHz, Pin A3 to Pin A0 = 1110, Pin Y5 to Pin Y0 = 111111 (see Figure 3) Input = 122.88 MHz, output = 155.52 MHz Input = 19.44 MHz, output = 245.76 MHz Input = 122.88 MHz, output = 155.52 MHz Input = 19.44 MHz, output = 245.76 MHz, see Figure 14 regarding CMOS toggle rates ...
... Input = 25 MHz, output = 125 MHz, Pin A3 to Pin A0 = 1110, Pin Y5 to Pin Y0 = 111111 (see Figure 3) Input = 122.88 MHz, output = 155.52 MHz Input = 19.44 MHz, output = 245.76 MHz Input = 122.88 MHz, output = 155.52 MHz Input = 19.44 MHz, output = 245.76 MHz, see Figure 14 regarding CMOS toggle rates ...
Control system

A control system is a device, or set of devices, that manages, commands, directs or regulates the behavior of other devices or systems. Industrial control systems are used in industrial production for controlling equipment or machines.There are two common classes of control systems, open loop control systems and closed loop control systems. In open loop control systems output is generated based on inputs. In closed loop control systems current output is taken into consideration and corrections are made based on feedback. A closed loop system is also called a feedback control system. The human body is a classic example of feedback systems.