


II. Modeling of the PMSM
... offers many advantages over the induction motor, such as an improved overall efficiency, the effective use of reluctance torque, the smaller losses and the compact built size. Recently, many studies point out different solutions for the PMSM drive control providing good capabilities for the quick an ...
... offers many advantages over the induction motor, such as an improved overall efficiency, the effective use of reluctance torque, the smaller losses and the compact built size. Recently, many studies point out different solutions for the PMSM drive control providing good capabilities for the quick an ...


Bartłomiej Kamiński, Marcin Nikoniuk, Łukasz Drązikowski
... machines can produce, speed independent, smooth torque. The distance between primary and secondary sides of the linear motor in this vehicle propulsion application is very hard to be kept constant, due to vehicle suspension. Moreover, magnetic circuit of the linear motor is inherently open. At both ...
... machines can produce, speed independent, smooth torque. The distance between primary and secondary sides of the linear motor in this vehicle propulsion application is very hard to be kept constant, due to vehicle suspension. Moreover, magnetic circuit of the linear motor is inherently open. At both ...



AB2 Driver User Manual D/N: AB02458000-00 REV: C
... Nanomotion Ltd. (hereinafter NM) warrants the product (other than software) manufactured by it to be free from defects in material and workmanship for a period of time of one year (except those parts normally considered as consumable/expendable components such as motor conditioning brushes). The war ...
... Nanomotion Ltd. (hereinafter NM) warrants the product (other than software) manufactured by it to be free from defects in material and workmanship for a period of time of one year (except those parts normally considered as consumable/expendable components such as motor conditioning brushes). The war ...



RS-485 for Digital Motor Control Applications
... Figure 4. Receiver Function With and Without Hysteresis Because no wire pair is perfectly balanced, there will be some differential-mode noise induced by EMI sources. Without receiver hysteresis, the receiver would change state each time the inputs intersect (a differential voltage of zero), whether ...
... Figure 4. Receiver Function With and Without Hysteresis Because no wire pair is perfectly balanced, there will be some differential-mode noise induced by EMI sources. Without receiver hysteresis, the receiver would change state each time the inputs intersect (a differential voltage of zero), whether ...

Kelly KEB Controllers User Manual
... • Do not apply power until you are certain the controller wiring is correct and has been double checked. Wiring faults will damage the controller. • Ensure that the B- wiring is securely and properly connected before applying power. • The preferred connection of the system contactor or circuit break ...
... • Do not apply power until you are certain the controller wiring is correct and has been double checked. Wiring faults will damage the controller. • Ensure that the B- wiring is securely and properly connected before applying power. • The preferred connection of the system contactor or circuit break ...
Auto-Electric Basic Technology - Part 2
... of different parts like switches. By using a relay the needed stronger current follows up a shorter way (main circuit over the relay). For the steering circuit to the relay (by a small amount of the steering current) is it possible to use a much thinner cable. By looking to the safety aspect shorter ...
... of different parts like switches. By using a relay the needed stronger current follows up a shorter way (main circuit over the relay). For the steering circuit to the relay (by a small amount of the steering current) is it possible to use a much thinner cable. By looking to the safety aspect shorter ...

the control of switched reluctance drives
... Although relatively little has been reported on the design of the switched reluctance generator controller, there is a broad variety in the proposed controller schemes [1]. At lower speeds, the current pulses are controlled by chopping the voltage between zero and -UDC,, or between +UDC and -UDC wit ...
... Although relatively little has been reported on the design of the switched reluctance generator controller, there is a broad variety in the proposed controller schemes [1]. At lower speeds, the current pulses are controlled by chopping the voltage between zero and -UDC,, or between +UDC and -UDC wit ...


A dual-polarity, bidirectional current-shunt monitor
... Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant ...
... Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant ...
engine performance using gasoline ethanol mixture - e
... Hybrid E-85, it is a research vehicle, combining two petroleum-saving technologies hybrid-fueled electric power and flexible capabilities. Hybrid powered system use two or more energy source at the same power system. The combination will take a consideration upon advantage and disadvantage from each ...
... Hybrid E-85, it is a research vehicle, combining two petroleum-saving technologies hybrid-fueled electric power and flexible capabilities. Hybrid powered system use two or more energy source at the same power system. The combination will take a consideration upon advantage and disadvantage from each ...

Design and Implementation of a Hybrid Electric Bike
... torque requirements, we were limited by space. To reach the appropriate gear reduction given our speed requirement, we were limited by the space between the rear wheel and the chain stay which does not allow for a gear reduction greater than 3 (driven) or 4 (driven) to 1 (drive) using standard chain ...
... torque requirements, we were limited by space. To reach the appropriate gear reduction given our speed requirement, we were limited by the space between the rear wheel and the chain stay which does not allow for a gear reduction greater than 3 (driven) or 4 (driven) to 1 (drive) using standard chain ...

Chapter 7 - 3 phase Induction Motor
... and a rotor mounted on bearings and separated from the stator by an air gap. However, in the induction machine both stator winding and rotor winding carry alternating currents. The induction machine can operate both as a motor and as generator As motors, they have many advantages. They are rugged, r ...
... and a rotor mounted on bearings and separated from the stator by an air gap. However, in the induction machine both stator winding and rotor winding carry alternating currents. The induction machine can operate both as a motor and as generator As motors, they have many advantages. They are rugged, r ...
File - ganesh subramanian
... 61. What is the cause of noise in transformer? The cause of noise in the transformer is mainly because of magneto-striction effect and also loosening of stampings and mechanical forces produced during working. 62.Why is the area of yoke of a transformer usually kept 15-20%more than that of core. By ...
... 61. What is the cause of noise in transformer? The cause of noise in the transformer is mainly because of magneto-striction effect and also loosening of stampings and mechanical forces produced during working. 62.Why is the area of yoke of a transformer usually kept 15-20%more than that of core. By ...

FIRST Electrical Design
... The speed controllers do exactly what you tell them to do. Your robot cannot make the sudden changes you are demanding for other reasons related to mechanical design and physics. You cannot hope that the control system will overcome all other losses. It does not have the power resources to overcome ...
... The speed controllers do exactly what you tell them to do. Your robot cannot make the sudden changes you are demanding for other reasons related to mechanical design and physics. You cannot hope that the control system will overcome all other losses. It does not have the power resources to overcome ...

Document
... Case 1: v1 = 0V The voltage drop across the diode is v1 = 0V, and the diode is turned off (an open circuit). Also, i11 = 0A. Case 2: v1 = VS, where VS > 0V The voltage drop across the diode is v1 = VS, and the diode is turned off (an open circuit). Also, i11 = VS/R11. Case 3: At t = 0-, v1 = VS, whe ...
... Case 1: v1 = 0V The voltage drop across the diode is v1 = 0V, and the diode is turned off (an open circuit). Also, i11 = 0A. Case 2: v1 = VS, where VS > 0V The voltage drop across the diode is v1 = VS, and the diode is turned off (an open circuit). Also, i11 = VS/R11. Case 3: At t = 0-, v1 = VS, whe ...

TSM17C Hardware Manual
... The TSM17C is designed to give optimum performance between 24 and 48 Volts DC. Choosing the voltage depends on the performance needed and motor/drive heating that is acceptable and/ or does not cause a drive over-temperature. Higher voltages will give higher speed performance but will cause the TSM1 ...
... The TSM17C is designed to give optimum performance between 24 and 48 Volts DC. Choosing the voltage depends on the performance needed and motor/drive heating that is acceptable and/ or does not cause a drive over-temperature. Higher voltages will give higher speed performance but will cause the TSM1 ...

Understanding Electric Motor Nameplates - Tech
... hertz supply will develop less torque and will draw less than full-load current. The motor will have a shaft RPM that is 15 to 20% higher than stated on the nameplate. PHASE The designation PH on the nameplate indicates whether the motor is single-phase (1) or 3-phase (3). A single-phase circuit can ...
... hertz supply will develop less torque and will draw less than full-load current. The motor will have a shaft RPM that is 15 to 20% higher than stated on the nameplate. PHASE The designation PH on the nameplate indicates whether the motor is single-phase (1) or 3-phase (3). A single-phase circuit can ...
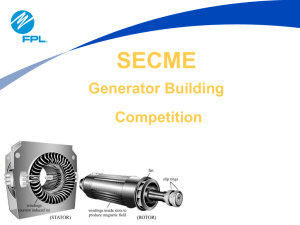
SECME-Generator-Building-Presentation-11-22
... be equal distance apart so that currents are in phase. To best utilize a 4 pole generator there should be a coil across each pair of poles. The coils can be tested individually. ...
... be equal distance apart so that currents are in phase. To best utilize a 4 pole generator there should be a coil across each pair of poles. The coils can be tested individually. ...
Brushed DC electric motor

A brushed DC motor is an internally commutated electric motor designed to be run from a direct current power source. Brushed motors were the first commercially important application of electric power to driving mechanical energy,and DC distribution systems were used for more than 100 years to operate motors in commercial and industrial buildings. Brushed DC motors can be varied in speed by changing the operating voltage or the strength of the magnetic field. Depending on the connections of the field to the power supply, the speed and torque characteristics of a brushed motor can be altered to provide steady speed or speed inversely proportional to the mechanical load. Brushed motors continue to be used for electrical propulsion, cranes, paper machines and steel rolling mills. Since the brushes wear down and require replacement, brushless DC motors using power electronic devices have displaced brushed motors from many applications