

standard hingebelt conveyor parts and service manual
... 2. Tighten pillow block bearing bolts, then loosen five (5) ¼ turns. (This step ensures that bearing is parallel to bearing mount surface, and that lockwasher is not adding additional torque to reading.) 3. Set torque wrench to 25 inch pounds. Tighten each bearing adjusting bolt alternately until 25 ...
... 2. Tighten pillow block bearing bolts, then loosen five (5) ¼ turns. (This step ensures that bearing is parallel to bearing mount surface, and that lockwasher is not adding additional torque to reading.) 3. Set torque wrench to 25 inch pounds. Tighten each bearing adjusting bolt alternately until 25 ...
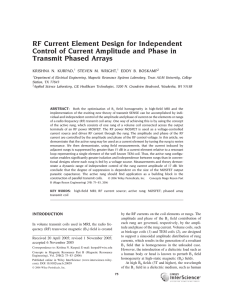
RF current element design for independent control of current
... high frequency. This requires a parallel transmit system with independent control of the amplitude and phase of the rung currents to enable optimization of B1 field homogeneity (3–5). The recent development of the theory of transmit SENSE (5, 6) and the consequent renewal of interest in multidimensio ...
... high frequency. This requires a parallel transmit system with independent control of the amplitude and phase of the rung currents to enable optimization of B1 field homogeneity (3–5). The recent development of the theory of transmit SENSE (5, 6) and the consequent renewal of interest in multidimensio ...



Ultra3000 Digital Servo Drives Installation Manual
... The 2098-DSD-HVxxx-xx drives can be powered with 230-240 V rms in order to be used in conjunction with motors designed for 230V operation. In such cases, the voltage levels used for shunting and DC bus overvoltage limits are adjusted to be compatible with the voltage limit of the motor. ...
... The 2098-DSD-HVxxx-xx drives can be powered with 230-240 V rms in order to be used in conjunction with motors designed for 230V operation. In such cases, the voltage levels used for shunting and DC bus overvoltage limits are adjusted to be compatible with the voltage limit of the motor. ...
NE02 Brochure
... protected by fuses or a circuit breaker with a rating which does not exceed the value marked on the data plate. This marked protective device rating is the maximum for which the equipment has been investigated and found acceptable. Where the marking specifies fuses, or “HACR Type” circuit breakers, ...
... protected by fuses or a circuit breaker with a rating which does not exceed the value marked on the data plate. This marked protective device rating is the maximum for which the equipment has been investigated and found acceptable. Where the marking specifies fuses, or “HACR Type” circuit breakers, ...

Magnetic Circuits - PEMCLAB
... Magnetic fields are produced by electric currents, which can be macroscopic currents in wires, or microscopic currents associated with electrons in atomic orbits. The magnetic field B is defined in terms of force on moving charge in the Lorentz force law. The interaction of magnetic field with charg ...
... Magnetic fields are produced by electric currents, which can be macroscopic currents in wires, or microscopic currents associated with electrons in atomic orbits. The magnetic field B is defined in terms of force on moving charge in the Lorentz force law. The interaction of magnetic field with charg ...
Electrician Apprenticeship Course Outline
... importance in apprenticeship programs in Alberta. These responsibilities are shared and require the joint efforts of government, employers, employees, apprentices and the public. Therefore, it is imperative that all parties are aware of circumstances that may lead to injury or harm. Safe learning ex ...
... importance in apprenticeship programs in Alberta. These responsibilities are shared and require the joint efforts of government, employers, employees, apprentices and the public. Therefore, it is imperative that all parties are aware of circumstances that may lead to injury or harm. Safe learning ex ...
EMC in Drive Engineering - SEW
... certain components. These components can respond differently in low frequency (LF) and high frequency (HF) ranges. This chapter shows the main differences between the low frequency and high frequency range in the frequency behavior of a conductor. The frequency-dependent resistance, referred to as t ...
... certain components. These components can respond differently in low frequency (LF) and high frequency (HF) ranges. This chapter shows the main differences between the low frequency and high frequency range in the frequency behavior of a conductor. The frequency-dependent resistance, referred to as t ...

PowerFlex 700 Adjustable Frequency AC Drive – Frames 0…6
... Unpredictable behavior can result if two or more devices are connected in this manner. ATTENTION: The drive start/stop/enable control circuitry includes solid state components. If hazards due to accidental contact with moving machinery or unintentional flow of liquid, gas or solids exist, an additio ...
... Unpredictable behavior can result if two or more devices are connected in this manner. ATTENTION: The drive start/stop/enable control circuitry includes solid state components. If hazards due to accidental contact with moving machinery or unintentional flow of liquid, gas or solids exist, an additio ...

- LJMU Research Online
... additional degrees of freedom, since independent flux and torque control of any machine always requires two independent currents, regardless of the phase number. These additional degrees of freedom can be used for various purposes. Some of these date back to the early days of multiphase machines and ...
... additional degrees of freedom, since independent flux and torque control of any machine always requires two independent currents, regardless of the phase number. These additional degrees of freedom can be used for various purposes. Some of these date back to the early days of multiphase machines and ...
Induction motor

An induction or asynchronous motor is an AC electric motor in which the electric current in the rotor needed to produce torque is obtained by electromagnetic induction from the magnetic field of the stator winding. An induction motor therefore does not require mechanical commutation, separate-excitation or self-excitation for all or part of the energy transferred from stator to rotor, as in universal, DC and large synchronous motors. An induction motor's rotor can be either wound type or squirrel-cage type.Three-phase squirrel-cage induction motors are widely used in industrial drives because they are rugged, reliable and economical. Single-phase induction motors are used extensively for smaller loads, such as household appliances like fans. Although traditionally used in fixed-speed service, induction motors are increasingly being used with variable-frequency drives (VFDs) in variable-speed service. VFDs offer especially important energy savings opportunities for existing and prospective induction motors in variable-torque centrifugal fan, pump and compressor load applications. Squirrel cage induction motors are very widely used in both fixed-speed and variable-frequency drive (VFD) applications. Variable voltage and variable frequency drives are also used in variable-speed service.