
A Selection Model for Motion Processing in Area MT
... velocity and selection stages operate in parallel. Shading within the boxes indicates different levels of activity at each stage. Arrows within motion-energy and local velocity stages indicate local directions of motion responding units. The responses shown are intended to be indicative but do not r ...
... velocity and selection stages operate in parallel. Shading within the boxes indicates different levels of activity at each stage. Arrows within motion-energy and local velocity stages indicate local directions of motion responding units. The responses shown are intended to be indicative but do not r ...


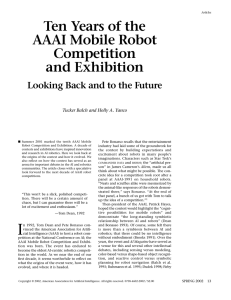
Ten Years of the AAAI Mobile Robot Competition and Exhibition
... mix of participants evolved to include a larger proportion of undergraduates from a broader selection of universities, including teaching colleges such as Swarthmore. This trend probably reflects the pervasiveness and accessibility of AI and robotics technologies. Recently, with the addition of new ...
... mix of participants evolved to include a larger proportion of undergraduates from a broader selection of universities, including teaching colleges such as Swarthmore. This trend probably reflects the pervasiveness and accessibility of AI and robotics technologies. Recently, with the addition of new ...







Organization of the Macaque Extrastriate Visual Cortex Re
... for solving the problem of dimensionality reduction or the problem of representing a multidimensional space on a lower dimensional space such that neighbor relationships are optimized. The technique is well established, heavily used in information technology applications, and instructions for implem ...
... for solving the problem of dimensionality reduction or the problem of representing a multidimensional space on a lower dimensional space such that neighbor relationships are optimized. The technique is well established, heavily used in information technology applications, and instructions for implem ...