





Solving With Or Without Equations
... For example, there are many orthogonal projections of a point on a non linear curve or surface but for distance constraints, only one is relevant. First order conditions, like KKT (Karush-Kuhn-Tucker), are necessary but not sufficient to fully characterize solutions. Solving KKT equations provides a ...
... For example, there are many orthogonal projections of a point on a non linear curve or surface but for distance constraints, only one is relevant. First order conditions, like KKT (Karush-Kuhn-Tucker), are necessary but not sufficient to fully characterize solutions. Solving KKT equations provides a ...









y - simonbaruchcurriculum
... This means that the two lines are parallel, so there are no solutions. 6 of 11 ...
... This means that the two lines are parallel, so there are no solutions. 6 of 11 ...




The Rational Numbers - Stony Brook Mathematics
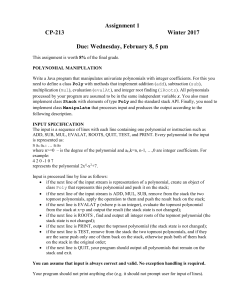
... Definition: A Polynomial is an expression of the form anxn + an-1xn-1 + ... + a1x1 + a0x0 where ai Q, for i = 0,1,…,n and n is a non-negative integer. This is to say that a polynomial p(x) is defined over Q. The polynomials over a ring form a ring, as do the integers. Z and P(R) are special kinds ...
... Definition: A Polynomial is an expression of the form anxn + an-1xn-1 + ... + a1x1 + a0x0 where ai Q, for i = 0,1,…,n and n is a non-negative integer. This is to say that a polynomial p(x) is defined over Q. The polynomials over a ring form a ring, as do the integers. Z and P(R) are special kinds ...

June 2006 - 6677 Mechanics M1
... (a) M1 for a complete (potential) valid method to get a (b) If consider car: then get 1400a = 2380 – 630 – T. Allow M1 A1 for equn of motion for car or trailer wherever seen (e.g. in (a)). So if consider two separately in (a), can get M1 A1 from (b) for one equation; then M1 A1 from (a) for second e ...
... (a) M1 for a complete (potential) valid method to get a (b) If consider car: then get 1400a = 2380 – 630 – T. Allow M1 A1 for equn of motion for car or trailer wherever seen (e.g. in (a)). So if consider two separately in (a), can get M1 A1 from (b) for one equation; then M1 A1 from (a) for second e ...


Systems of Linear and Quadratic Equations
... In Lesson 10-7, you used the discriminant to find the number of solutions of a quadratic equation. With systems of linear and quadratic equations you can also use the discriminant once you eliminate a variable. ...
... In Lesson 10-7, you used the discriminant to find the number of solutions of a quadratic equation. With systems of linear and quadratic equations you can also use the discriminant once you eliminate a variable. ...


s08a.pdf
... Consider a situation involving a single independent variable x and an associated dependent variable y. Let m pairs of values (points) (xi , yi ), i = 1, 2, ..., m be given. Consider the approximation problem consisting of finding the equation of a straight line which best represents the collection o ...
... Consider a situation involving a single independent variable x and an associated dependent variable y. Let m pairs of values (points) (xi , yi ), i = 1, 2, ..., m be given. Consider the approximation problem consisting of finding the equation of a straight line which best represents the collection o ...