



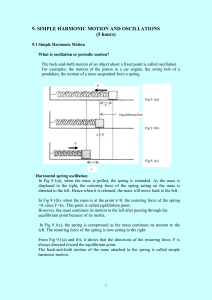
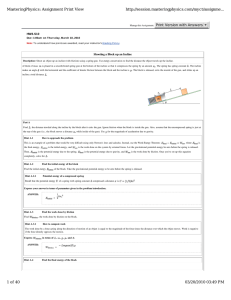
Powerpoint
... coefficient of friction is 0.25. If the disk starts out at 5.0 rev/sec how many revolutions does it make before it comes to rest? Work-energy theorem W = F d = 0 – ½ mv2 F = -mmg d = - ½ mv2 d= v2 /(2mg)=(5.0 x 2p x 0.50)2/ (0.50 x 10) m = 5 p2 m Rev = d / 2pr = 16 revolutions What if the disk were ...
... coefficient of friction is 0.25. If the disk starts out at 5.0 rev/sec how many revolutions does it make before it comes to rest? Work-energy theorem W = F d = 0 – ½ mv2 F = -mmg d = - ½ mv2 d= v2 /(2mg)=(5.0 x 2p x 0.50)2/ (0.50 x 10) m = 5 p2 m Rev = d / 2pr = 16 revolutions What if the disk were ...





8.5 Collisions 8 Momentum
... 8.4 Conservation of Momentum The force or impulse that changes momentum must be exerted on the object by something outside the object. • Molecular forces within a basketball have no effect on the momentum of the basketball. • A push against the dashboard from inside does not affect the momentum of a ...
... 8.4 Conservation of Momentum The force or impulse that changes momentum must be exerted on the object by something outside the object. • Molecular forces within a basketball have no effect on the momentum of the basketball. • A push against the dashboard from inside does not affect the momentum of a ...
Seesaws 9 Balanced Seesaw
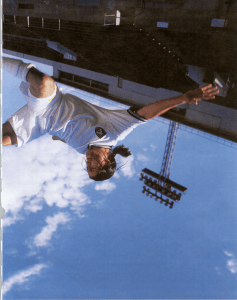
... Why does the seesaw need a pivot? Why does a lone rider plummet to the ground? Why do the riders’ weights and positions matter? Why does distance from the pivot affect speed? ...
... Why does the seesaw need a pivot? Why does a lone rider plummet to the ground? Why do the riders’ weights and positions matter? Why does distance from the pivot affect speed? ...

Chapter 9 Rotational Motion
... The instantaneous acceleration of a translating body was defined in equation 2.32 as the derivative of the velocity of the body with respect to time, that is, a = lim ✁v = dv ✁td0 ✁t dt which was then rewritten in the form and was integrated as ...
... The instantaneous acceleration of a translating body was defined in equation 2.32 as the derivative of the velocity of the body with respect to time, that is, a = lim ✁v = dv ✁td0 ✁t dt which was then rewritten in the form and was integrated as ...


PHYSICS 2325 EXAM 2 REVIEW
... a. the angular velocity remains constant. b. the object keeps on returning to its original angular position. c. the axis of rotation ends up perpendicular to its original position. d. the angular displacement remains constant. e. the rotational kinetic energy never changes. ANS: b 69. A sphere with ...
... a. the angular velocity remains constant. b. the object keeps on returning to its original angular position. c. the axis of rotation ends up perpendicular to its original position. d. the angular displacement remains constant. e. the rotational kinetic energy never changes. ANS: b 69. A sphere with ...

Lecture 1 - GEOCITIES.ws
... Requirements: 1. Simulate motion of the sun, planets, satellites and a few other assorted objects; 2. Simulation should run faster than real time; 3. Output of the simulation should be graphical display of the solar system with facilities like scaling, zooming, etc. ...
... Requirements: 1. Simulate motion of the sun, planets, satellites and a few other assorted objects; 2. Simulation should run faster than real time; 3. Output of the simulation should be graphical display of the solar system with facilities like scaling, zooming, etc. ...

611: Electromagnetic Theory II
... reference, then they predict that the speed of light will be c ≈ 3 × 108 metres per second in that frame. Therefore, if we assume that the Maxwell equations hold in all inertial frames, then they predict that the speed of light will have that same value in all inertial frames. Since this prediction ...
... reference, then they predict that the speed of light will be c ≈ 3 × 108 metres per second in that frame. Therefore, if we assume that the Maxwell equations hold in all inertial frames, then they predict that the speed of light will have that same value in all inertial frames. Since this prediction ...
Relativistic angular momentum

""Angular momentum tensor"" redirects to here.In physics, relativistic angular momentum refers to the mathematical formalisms and physical concepts that define angular momentum in special relativity (SR) and general relativity (GR). The relativistic quantity is subtly different from the three-dimensional quantity in classical mechanics.Angular momentum is a dynamical quantity derived from position and momentum, and is important; angular momentum is a measure of an object's ""amount of rotational motion"" and resistance to stop rotating. Also, in the same way momentum conservation corresponds to translational symmetry, angular momentum conservation corresponds to rotational symmetry – the connection between symmetries and conservation laws is made by Noether's theorem. While these concepts were originally discovered in classical mechanics – they are also true and significant in special and general relativity. In terms of abstract algebra; the invariance of angular momentum, four-momentum, and other symmetries in spacetime, are described by the Poincaré group and Lorentz group.Physical quantities which remain separate in classical physics are naturally combined in SR and GR by enforcing the postulates of relativity, an appealing characteristic. Most notably; space and time coordinates combine into the four-position, and energy and momentum combine into the four-momentum. These four-vectors depend on the frame of reference used, and change under Lorentz transformations to other inertial frames or accelerated frames.Relativistic angular momentum is less obvious. The classical definition of angular momentum is the cross product of position x with momentum p to obtain a pseudovector x×p, or alternatively as the exterior product to obtain a second order antisymmetric tensor x∧p. What does this combine with, if anything? There is another vector quantity not often discussed – it is the time-varying moment of mass (not the moment of inertia) related to the boost of the centre of mass of the system, and this combines with the classical angular momentum to form an antisymmetric tensor of second order. For rotating mass–energy distributions (such as gyroscopes, planets, stars, and black holes) instead of point-like particles, the angular momentum tensor is expressed in terms of the stress–energy tensor of the rotating object.In special relativity alone, in the rest frame of a spinning object; there is an intrinsic angular momentum analogous to the ""spin"" in quantum mechanics and relativistic quantum mechanics, although for an extended body rather than a point particle. In relativistic quantum mechanics, elementary particles have spin and this is an additional contribution to the orbital angular momentum operator, yielding the total angular momentum tensor operator. In any case, the intrinsic ""spin"" addition to the orbital angular momentum of an object can be expressed in terms of the Pauli–Lubanski pseudovector.