




Newtonian Physics - UFDC Image Array 2
... We Americans assume that our economic system will always scamper to provide us with the products we want. Special orders don’t upset us! I want my MTV! The truth is more complicated, especially in our education system, which is paid for by the students but controlled by the professoriate. Witness th ...
... We Americans assume that our economic system will always scamper to provide us with the products we want. Special orders don’t upset us! I want my MTV! The truth is more complicated, especially in our education system, which is paid for by the students but controlled by the professoriate. Witness th ...

Rotational Motion of Solid Objects
... the torques produced by weights on either side of the fulcrum of our balance are equal in magnitude, the scale is balanced. It will not rotate. Most of us have tried to turn a nut with a wrench at some time. We exert the force at the end of the wrench, in a direction perpendicular to the handle (fig ...
... the torques produced by weights on either side of the fulcrum of our balance are equal in magnitude, the scale is balanced. It will not rotate. Most of us have tried to turn a nut with a wrench at some time. We exert the force at the end of the wrench, in a direction perpendicular to the handle (fig ...
Dynamics Extra Study Questions
... 4.0 mm, accelerated by a net electrical force of 5.6 × 10–15 N. Assuming that it started from rest, find its acceleration and its final velocity. 23. A speedboat is pulling two water skiers, using two ropes attached to the back of the boat. Each rope makes an angle of 30° on either side of the boat’ ...
... 4.0 mm, accelerated by a net electrical force of 5.6 × 10–15 N. Assuming that it started from rest, find its acceleration and its final velocity. 23. A speedboat is pulling two water skiers, using two ropes attached to the back of the boat. Each rope makes an angle of 30° on either side of the boat’ ...

chapter eight solutions - Jay Mathy Science Wiki
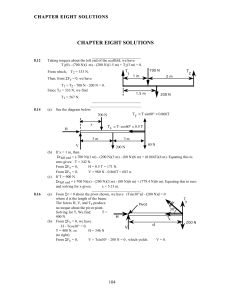
... Using ω = ω0 + α1t, we have 10 rad/s = 0 + α1(6 s), giving α1 = 1.67 rad/s2. Then, 36 N m= (1.67 rad/s2)I, or I = 21.6 kg m2. When the applied torque is removed, we have τfriction = Iα2. Using ω = ω0 + α2t we have 0 = 10 rad/s + α2(60 s), so ...
... Using ω = ω0 + α1t, we have 10 rad/s = 0 + α1(6 s), giving α1 = 1.67 rad/s2. Then, 36 N m= (1.67 rad/s2)I, or I = 21.6 kg m2. When the applied torque is removed, we have τfriction = Iα2. Using ω = ω0 + α2t we have 0 = 10 rad/s + α2(60 s), so ...

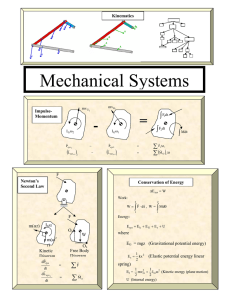
Mechanical Vibrations
... damper, and (4) the excitation. The first three elements describe the physical system. For example, it can be said that a given system consists of a mass, a spring, and a damper arranged as shown in the figure. Energy may be stored in the mass and the spring and dissipated in the damper in the form ...
... damper, and (4) the excitation. The first three elements describe the physical system. For example, it can be said that a given system consists of a mass, a spring, and a damper arranged as shown in the figure. Energy may be stored in the mass and the spring and dissipated in the damper in the form ...
Fabio Romanelli SHM
... The motion of an object can be predicted if the external forces acting upon it are known. A special type of motion occurs when the force on the object is proportional to the displacement of the object from equilibrium. If this force always acts towards the equilibrium position a back and forth motio ...
... The motion of an object can be predicted if the external forces acting upon it are known. A special type of motion occurs when the force on the object is proportional to the displacement of the object from equilibrium. If this force always acts towards the equilibrium position a back and forth motio ...




Problem 19.1 The moment of inertia of the rotor of the medical
... to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording or likewise. ...
... to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording or likewise. ...

Classical Mechanics: a Critical Introduction
... Kinematics is simply the mathematical description of motion, and makes no reference to the forces which cause the motion. Thus, kinematics is not really part of physics but provides us with the mathematical framework within which the laws of physics can be stated in a precise way. ...
... Kinematics is simply the mathematical description of motion, and makes no reference to the forces which cause the motion. Thus, kinematics is not really part of physics but provides us with the mathematical framework within which the laws of physics can be stated in a precise way. ...
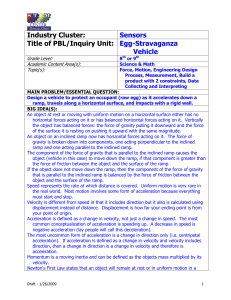
Center of mass

In physics, the center of mass of a distribution of mass in space is the unique point where the weighted relative position of the distributed mass sums to zero or the point where if a force is applied causes it to move in direction of force without rotation. The distribution of mass is balanced around the center of mass and the average of the weighted position coordinates of the distributed mass defines its coordinates. Calculations in mechanics are often simplified when formulated with respect to the center of mass.In the case of a single rigid body, the center of mass is fixed in relation to the body, and if the body has uniform density, it will be located at the centroid. The center of mass may be located outside the physical body, as is sometimes the case for hollow or open-shaped objects, such as a horseshoe. In the case of a distribution of separate bodies, such as the planets of the Solar System, the center of mass may not correspond to the position of any individual member of the system.The center of mass is a useful reference point for calculations in mechanics that involve masses distributed in space, such as the linear and angular momentum of planetary bodies and rigid body dynamics. In orbital mechanics, the equations of motion of planets are formulated as point masses located at the centers of mass. The center of mass frame is an inertial frame in which the center of mass of a system is at rest with respect to the origin of the coordinate system.