

Physics 2511 Laboratory Manual
... b. Having done that, click on the Chart Wizard button in the toolbar. A box entitled “Chart Wizard - Step 1 of 4 – Chart Type” should appear. Click on “XY Scatter” under “Chart Type”, then click the “Next” button c. Click on the “Series” tab, then the add button. Three editable boxes should appear a ...
... b. Having done that, click on the Chart Wizard button in the toolbar. A box entitled “Chart Wizard - Step 1 of 4 – Chart Type” should appear. Click on “XY Scatter” under “Chart Type”, then click the “Next” button c. Click on the “Series” tab, then the add button. Three editable boxes should appear a ...

7.2 Angular Momentum
... 13. An ice skater begins a spin with her arms outstretched and then pulls them inward. Tell whether each of the following increases, decreases, or stays the same. (a) moment of inertia ...
... 13. An ice skater begins a spin with her arms outstretched and then pulls them inward. Tell whether each of the following increases, decreases, or stays the same. (a) moment of inertia ...


b) Electromagnetic Force
... horizontal force of 40.0N acts on the block accelerating it for 3.00s. Determine the velocity of the block after 3.00s. 4.41m/s 6. A force of 260.0N pushes on a 25.0kg block starting from rest, then achieves a velocity of 2.00m/s in a time of 4.00s. Determine the coefficient of sliding friction betw ...
... horizontal force of 40.0N acts on the block accelerating it for 3.00s. Determine the velocity of the block after 3.00s. 4.41m/s 6. A force of 260.0N pushes on a 25.0kg block starting from rest, then achieves a velocity of 2.00m/s in a time of 4.00s. Determine the coefficient of sliding friction betw ...


AQAA2_ch7 Linear Motion
... cancel out. In figure 7.6b, the forces (green arrows) cancel out. The vertical forces are the same size (arrows are the same length) but in opposite directions. The horizontal forces are also of the same size and in opposite directions, hence all forces cancel out. When there is zero net force actin ...
... cancel out. In figure 7.6b, the forces (green arrows) cancel out. The vertical forces are the same size (arrows are the same length) but in opposite directions. The horizontal forces are also of the same size and in opposite directions, hence all forces cancel out. When there is zero net force actin ...
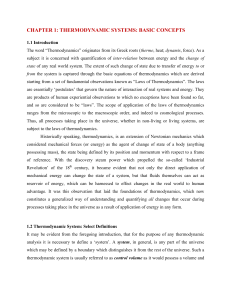
Table of Content
... on whether the initial pressure of the gas is lower or higher than the externally applied pressure. In addition, if there is a temperature differential between the system and the surroundings the former may gain or lose energy through heat transfer across its boundary. This brings us to a pertinent ...
... on whether the initial pressure of the gas is lower or higher than the externally applied pressure. In addition, if there is a temperature differential between the system and the surroundings the former may gain or lose energy through heat transfer across its boundary. This brings us to a pertinent ...

Semester Exam Review
... What is the greatest resultant obtainable with two If a force of 6.5 N acts due West on an object while concurrent forces of 6.8 N and 2.3 N? another of 8.8 N acts due north, what is the magnitude of the resultant? What is the smallest? ...
... What is the greatest resultant obtainable with two If a force of 6.5 N acts due West on an object while concurrent forces of 6.8 N and 2.3 N? another of 8.8 N acts due north, what is the magnitude of the resultant? What is the smallest? ...

document
... Out of common experience, we know that any change in velocity must be due to an interaction between an object (a body) and something in its surroundings. An interaction that can cause an acceleration of a body is called a force. Force can be loosely defined as a push or pull on the body. The r ...
... Out of common experience, we know that any change in velocity must be due to an interaction between an object (a body) and something in its surroundings. An interaction that can cause an acceleration of a body is called a force. Force can be loosely defined as a push or pull on the body. The r ...



Ch13-2 Simple Harmonic Motion
... CT4: In P12.67b, which principle do we have to use to get the speed of the bullet from the height the bob rises? A. Newton’s laws. ...
... CT4: In P12.67b, which principle do we have to use to get the speed of the bullet from the height the bob rises? A. Newton’s laws. ...




exam3_T113
... A 100-kg parachute falls at a constant speed of 1.00 m/s. At what rate is energy being lost? A) 980 W B) 19.8 W C) 89.0 W D) 49.0 W E) 490 W Ans: P = mgv = 100 × 9.8 × 1.0 = 980 W ...
... A 100-kg parachute falls at a constant speed of 1.00 m/s. At what rate is energy being lost? A) 980 W B) 19.8 W C) 89.0 W D) 49.0 W E) 490 W Ans: P = mgv = 100 × 9.8 × 1.0 = 980 W ...




Planar kinetics of a rigid body: Equations of Motion
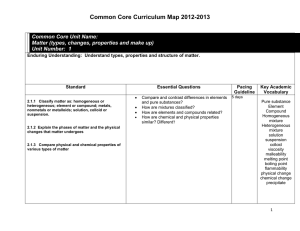
... During an impact, the center of gravity of this crash dummy will decelerate with the vehicle, but also experience another acceleration due to its rotation about point A. How can engineers use this information to determine the forces exerted by the seat belt on a passenger during a crash? W. Wang ...
... During an impact, the center of gravity of this crash dummy will decelerate with the vehicle, but also experience another acceleration due to its rotation about point A. How can engineers use this information to determine the forces exerted by the seat belt on a passenger during a crash? W. Wang ...
Chapter 7 Solution Manual
... a) There is only a single s orbital in any shell. l = 1 and m l = 0: one value of m l = one s orbital. b) There are five d orbitals in any shell. l = 2 and m l = –2, –1, 0, +1, +2. Five values of m l = five d orbitals. c) There are three p orbitals in any shell. l = 1 and m l = –1, 0, +1. Three valu ...
... a) There is only a single s orbital in any shell. l = 1 and m l = 0: one value of m l = one s orbital. b) There are five d orbitals in any shell. l = 2 and m l = –2, –1, 0, +1, +2. Five values of m l = five d orbitals. c) There are three p orbitals in any shell. l = 1 and m l = –1, 0, +1. Three valu ...