

Chapter 2 Motion Along a Straight Line Position, Displacement
... Now consider the following motion that takes 4 seconds. x/m Note that it traveled to the left for a total of 20 meters. In 4 seconds. We say that the ball’s velocity is - 5 m/s (–20 m / 4 s). The (–) sign signifies it moved in the negative x-direction. ...
... Now consider the following motion that takes 4 seconds. x/m Note that it traveled to the left for a total of 20 meters. In 4 seconds. We say that the ball’s velocity is - 5 m/s (–20 m / 4 s). The (–) sign signifies it moved in the negative x-direction. ...




Linear vs Rational Equations in One Variable
... This is a good point to pause and review how the above equations are related. Eq. 3, Eq. 4, Eq. 5, and Eqs. 6 are equivalent and their common solution set is {−8,3} ; Eq. 1 and Eq. 2 are equivalent and their solution set is an unknown subset of {−8,3} ; Eq. 2 and Eq. 3 are probably not equivalent. ...
... This is a good point to pause and review how the above equations are related. Eq. 3, Eq. 4, Eq. 5, and Eqs. 6 are equivalent and their common solution set is {−8,3} ; Eq. 1 and Eq. 2 are equivalent and their solution set is an unknown subset of {−8,3} ; Eq. 2 and Eq. 3 are probably not equivalent. ...




On Approximate Robust Counterparts of Uncertain Semidefinite and
... in variables x, {λ` ∈ R}M `=1 , {Y` ∈ S }`=M +1 . Consequently, (AR[ρ]) is equivalent to the semidefinite program of minimizing the objective f T x under the constraints (11). Note that the resulting problem (A[ρ]) is typically much better suited for numerical processing than (AR[ρ]). Indeed, the fi ...
... in variables x, {λ` ∈ R}M `=1 , {Y` ∈ S }`=M +1 . Consequently, (AR[ρ]) is equivalent to the semidefinite program of minimizing the objective f T x under the constraints (11). Note that the resulting problem (A[ρ]) is typically much better suited for numerical processing than (AR[ρ]). Indeed, the fi ...


Rotation Matrices 2
... dimensions: Euler sequences and Cardan sequences. Euler sequences use a shared axis in the aligned proximal and distal segments for the first rotation, then an axis in the distal segment, which has been rotated by the first rotation, for the second rotation, and finally, the same distal segment axis ...
... dimensions: Euler sequences and Cardan sequences. Euler sequences use a shared axis in the aligned proximal and distal segments for the first rotation, then an axis in the distal segment, which has been rotated by the first rotation, for the second rotation, and finally, the same distal segment axis ...


2/23/11 Lesson 2.6
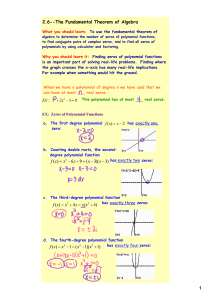
... What you should learn: To use the fundamental theorem of algebra to determine the number of zeros of polynomial functions, to find conjugate pairs of complex zeros, and to find all zeros of polynomials by using calculator and factoring. ...
... What you should learn: To use the fundamental theorem of algebra to determine the number of zeros of polynomial functions, to find conjugate pairs of complex zeros, and to find all zeros of polynomials by using calculator and factoring. ...

