
Document
... • A vector is specified as the difference between two points. • If an origin is specified, then a point can be represented by a vector from the origin. • But, a point is still not a vector in a coordinate-free point of view. ...
... • A vector is specified as the difference between two points. • If an origin is specified, then a point can be represented by a vector from the origin. • But, a point is still not a vector in a coordinate-free point of view. ...

Chapter 2 - Cartesian Vectors and Tensors: Their Algebra Definition
... parallel if one is a linear combination of the other, i.e., they both have the same direction. If a and b are two vectors from the same origin, then all linear combination of a and b are in the same plane as a and b, i.,e., they are coplanar. We will prove this statement when we get to the triple sc ...
... parallel if one is a linear combination of the other, i.e., they both have the same direction. If a and b are two vectors from the same origin, then all linear combination of a and b are in the same plane as a and b, i.,e., they are coplanar. We will prove this statement when we get to the triple sc ...

Appendix B. Vector Spaces Throughout this text we have noted that
... Throughout this text we have noted that various objects of interest form a vector space. Here we outline the basic structure of a vector space. You may find it useful to refer to this Appendix when you encounter this concept in the text. B.1. What are vector spaces? In physics and engineering one of ...
... Throughout this text we have noted that various objects of interest form a vector space. Here we outline the basic structure of a vector space. You may find it useful to refer to this Appendix when you encounter this concept in the text. B.1. What are vector spaces? In physics and engineering one of ...




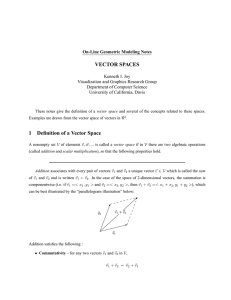
VECTOR SPACES 1 Definition of a Vector Space
... If a set of vectors is not linearly independent, then it is called linearly dependent. This implies that the equation above has a nonzero solution, that is there exist c1 , c2 , ..., cn which are not all zero, such that c1~v1 + c2~v2 + · · · + cn~vn = ~0 This implies that at least one of the vectors ...
... If a set of vectors is not linearly independent, then it is called linearly dependent. This implies that the equation above has a nonzero solution, that is there exist c1 , c2 , ..., cn which are not all zero, such that c1~v1 + c2~v2 + · · · + cn~vn = ~0 This implies that at least one of the vectors ...
Document
... A plane is often represented by the 4D vector (A, B, C, D) If a 4D homogeneous point P lies in the plane, then (A, B, C, D) P = 0 If a point does not lie in the plane, then the dot product tells us which side of the plane the point lies on ...
... A plane is often represented by the 4D vector (A, B, C, D) If a 4D homogeneous point P lies in the plane, then (A, B, C, D) P = 0 If a point does not lie in the plane, then the dot product tells us which side of the plane the point lies on ...

10/05/12 - cse.sc.edu
... A useful rule to minimalize mismatch errors in the initialization and shutdown steps Means that creating an object acquires and initializes all the necessary resources, and destroying it destroys and shuts down all those ...
... A useful rule to minimalize mismatch errors in the initialization and shutdown steps Means that creating an object acquires and initializes all the necessary resources, and destroying it destroys and shuts down all those ...

Chapter 4, General Vector Spaces Section 4.1, Real Vector Spaces
... Chapter 4, General Vector Spaces Section 4.1, Real Vector Spaces In this chapter we will call objects that satisfy a set of axioms as vectors. This can be thought as generalizing the idea of vectors to a class of objects. Vector space axioms: Definition: Let V be an arbitrary nonempty set of objects ...
... Chapter 4, General Vector Spaces Section 4.1, Real Vector Spaces In this chapter we will call objects that satisfy a set of axioms as vectors. This can be thought as generalizing the idea of vectors to a class of objects. Vector space axioms: Definition: Let V be an arbitrary nonempty set of objects ...
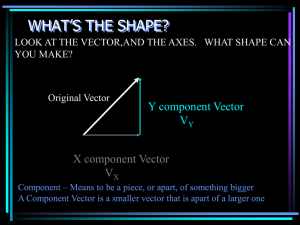

VECTORS comp box method addition 2015-16
... Yes, there is a much faster and easier way, called the “box method” The box method is a technique that organizes all the work into a few simple steps that anyone can do Lets look at the same problem again using the box method, on the side will be the longer method In the end chose the method that wo ...
... Yes, there is a much faster and easier way, called the “box method” The box method is a technique that organizes all the work into a few simple steps that anyone can do Lets look at the same problem again using the box method, on the side will be the longer method In the end chose the method that wo ...


Linear algebra and the geometry of quadratic equations Similarity
... Linear algebra and the geometry of quadratic equations Similarity transformations and orthogonal matrices First, some things to recall from linear algebra. Two square matrices A and B are similar if there is an invertible matrix S such that A = S −1 BS. This is equivalent to B = SAS −1 . The express ...
... Linear algebra and the geometry of quadratic equations Similarity transformations and orthogonal matrices First, some things to recall from linear algebra. Two square matrices A and B are similar if there is an invertible matrix S such that A = S −1 BS. This is equivalent to B = SAS −1 . The express ...

vector - e-CTLT
... • Let a and b be any two vectors. From the initial point of a, vector b is drawn and parallelogram OACB is completed with OA and OB as adjacent sides. The vector OC is defined as the sum of a and b. This is called the parallelogram law of addition of vectors. • The sum of two vectors is also called ...
... • Let a and b be any two vectors. From the initial point of a, vector b is drawn and parallelogram OACB is completed with OA and OB as adjacent sides. The vector OC is defined as the sum of a and b. This is called the parallelogram law of addition of vectors. • The sum of two vectors is also called ...
Section 3.3 Vectors in the Plane
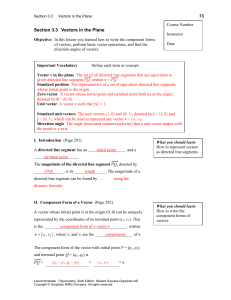
... In operations with vectors, numbers are usually referred to as . Geometrically, the product of a vector v and ...
... In operations with vectors, numbers are usually referred to as . Geometrically, the product of a vector v and ...

Bivector

In mathematics, a bivector or 2-vector is a quantity in exterior algebra or geometric algebra that extends the idea of scalars and vectors. If a scalar is considered an order zero quantity, and a vector is an order one quantity, then a bivector can be thought of as being of order two. Bivectors have applications in many areas of mathematics and physics. They are related to complex numbers in two dimensions and to both pseudovectors and quaternions in three dimensions. They can be used to generate rotations in any dimension, and are a useful tool for classifying such rotations. They also are used in physics, tying together a number of otherwise unrelated quantities.Bivectors are generated by the exterior product on vectors: given two vectors a and b, their exterior product a ∧ b is a bivector, as is the sum of any bivectors. Not all bivectors can be generated as a single exterior product. More precisely, a bivector that can be expressed as an exterior product is called simple; in up to three dimensions all bivectors are simple, but in higher dimensions this is not the case. The exterior product is antisymmetric, so b ∧ a is the negation of the bivector a ∧ b, producing the opposite orientation, and a ∧ a is the zero bivector.Geometrically, a simple bivector can be interpreted as an oriented plane segment, much as vectors can be thought of as directed line segments. The bivector a ∧ b has a magnitude equal to the area of the parallelogram with edges a and b, has the attitude of the plane spanned by a and b, and has orientation being the sense of the rotation that would align a with b.