






here
... The simplex algorithm is not an algorithm which runs in polynomial time. It was long open, whether there exists a polynomial time algorithm for linear programming until Khachiyan [2] showed that the ellipsoid method[5, 3] can solve linear programs in polynomial time. The remarkable fact is that the ...
... The simplex algorithm is not an algorithm which runs in polynomial time. It was long open, whether there exists a polynomial time algorithm for linear programming until Khachiyan [2] showed that the ellipsoid method[5, 3] can solve linear programs in polynomial time. The remarkable fact is that the ...




Vector Spaces
... defined on R. Is C 1 (R) a subspace of F ? Why or why not? (a) The zero function, f (t) = 0 for all t ∈ R, is in C 1 (R), since f (t) is continuous and f 0 (t) = 0, which is also continuous. Let g, h ∈ C 1 (R), and let c be a scalar. (b) We have that (g + h)(t) = g(t) + h(t) is continous on R, and ( ...
... defined on R. Is C 1 (R) a subspace of F ? Why or why not? (a) The zero function, f (t) = 0 for all t ∈ R, is in C 1 (R), since f (t) is continuous and f 0 (t) = 0, which is also continuous. Let g, h ∈ C 1 (R), and let c be a scalar. (b) We have that (g + h)(t) = g(t) + h(t) is continous on R, and ( ...




Document
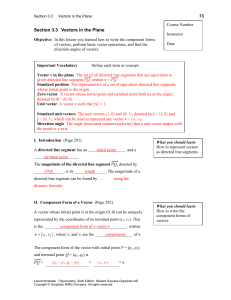
... You don’t necessarily have to be able to multiply two vectors by each other or even to be able to define the length of a vector, though those are very useful operations. The common example of directed line segments (arrows) in 2D or 3D fits this idea, because you can add such arrows by the parallelo ...
... You don’t necessarily have to be able to multiply two vectors by each other or even to be able to define the length of a vector, though those are very useful operations. The common example of directed line segments (arrows) in 2D or 3D fits this idea, because you can add such arrows by the parallelo ...