
A Park transform-based method for condition monitoring of three-phase electromechanical systems
... A principal benefit of this transformation is that the 60 Hz components of the electrical waveforms can be eliminated by synchronizing the transform with the electrical angle of the utility. The resulting transformed waveforms can expose small changes in the machine behavior [10]. The transformation ...
... A principal benefit of this transformation is that the 60 Hz components of the electrical waveforms can be eliminated by synchronizing the transform with the electrical angle of the utility. The resulting transformed waveforms can expose small changes in the machine behavior [10]. The transformation ...
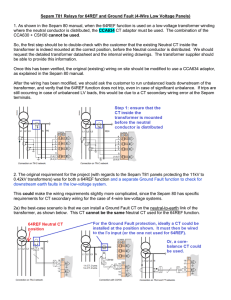
Sepam T81 Relays for 64REF and Ground Fault (4
... We would inform the customer and get their confirmation that the low-voltage ground fault function would not be done with a sum of the 3 phases plus the neutral current. The protection would be made by directly measuring the ground current through the neutral-to-earth link of the transformer. 2b) th ...
... We would inform the customer and get their confirmation that the low-voltage ground fault function would not be done with a sum of the 3 phases plus the neutral current. The protection would be made by directly measuring the ground current through the neutral-to-earth link of the transformer. 2b) th ...




Digital Control
... state response of C(z) against this input is then given by C(ejωh ). It appears that we can discuss the frequency domain properties via C(ejωh ). For example, one might attempt to employ phase lead/lag compensation based on this quantity. However, due to sampling, this frequency response does not fu ...
... state response of C(z) against this input is then given by C(ejωh ). It appears that we can discuss the frequency domain properties via C(ejωh ). For example, one might attempt to employ phase lead/lag compensation based on this quantity. However, due to sampling, this frequency response does not fu ...



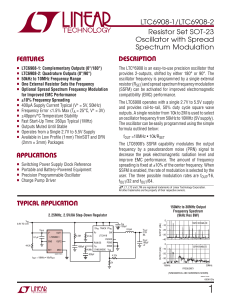
Generating Low Phase-Noise Clocks for Audio
... clock of 22.5792 MHz or 24.5760 MHz. This system clock must be synchronized with the low-frequency sampling clock using a phase-locked loop (PLL), but the sampling clock is often too low in frequency for use with many PLL-based clock drivers. Some audio PLLs can accept the low frequency sampling clo ...
... clock of 22.5792 MHz or 24.5760 MHz. This system clock must be synchronized with the low-frequency sampling clock using a phase-locked loop (PLL), but the sampling clock is often too low in frequency for use with many PLL-based clock drivers. Some audio PLLs can accept the low frequency sampling clo ...





Accurate Position Estimation in Switched Reluctance Motor With
... including eddy-current and mutual flux correction (shown in blod line). flux-linkage characteristics. From the figure, it may be seen that three look-up tables are searched at every sample time, namely - (i) eddy current correction, (ii) mutual flux and (iii) static flux-linkage. All three look-up t ...
... including eddy-current and mutual flux correction (shown in blod line). flux-linkage characteristics. From the figure, it may be seen that three look-up tables are searched at every sample time, namely - (i) eddy current correction, (ii) mutual flux and (iii) static flux-linkage. All three look-up t ...


Performance comparison of basic three type differential amplifiers
... A. Calculate the values of Aud, Aucm, CMRR, GBW, BW and SR for Iref=20uA and CL=10p. B. Using PSpice simulation, determine graphically the values of Aud, Aucm, CMRR, GBW, BW and SR for Iref=20uA and CL=10p. C. Present the results from A and B in tabular form and make the conclusions about accuracy o ...
... A. Calculate the values of Aud, Aucm, CMRR, GBW, BW and SR for Iref=20uA and CL=10p. B. Using PSpice simulation, determine graphically the values of Aud, Aucm, CMRR, GBW, BW and SR for Iref=20uA and CL=10p. C. Present the results from A and B in tabular form and make the conclusions about accuracy o ...








Chirp spectrum

The spectrum of a chirp pulse describes its characteristics in terms of its frequency components. This frequency-domain representation is an alternative to the more familiar time-domain waveform, and the two versions are mathematically related by the Fourier transform. The spectrum is of particular interest when pulses are subject to signal processing. For example, when a chirp pulse is compressed by its matched filter, the resulting waveform contains not only a main narrow pulse but, also, a variety of unwanted artifacts many of which are directly attributable to features in the chirp's spectral characteristics. The simplest way to derive the spectrum of a chirp, now computers are widely available, is to sample the time-domain waveform at a frequency well above the Nyquist limit and call up an FFT algorithm to obtain the desired result. As this approach was not an option for the early designers, they resorted to analytic analysis, where possible, or to graphical or approximation methods, otherwise. These early methods still remain helpful, however, as they give additional insight into the behavior and properties of chirps.