





What is a Group Representation?
... Definition 5 (Subrepresentations). A G-subrepresentation of V is a vector subspace W ⊆ V which is invariant by the action of G. Definition 6 (Irreducible representations). A representation V of G is irreducible if it has no proper subrepresentations. Example 3 (Non irreducible representation). Let S ...
... Definition 5 (Subrepresentations). A G-subrepresentation of V is a vector subspace W ⊆ V which is invariant by the action of G. Definition 6 (Irreducible representations). A representation V of G is irreducible if it has no proper subrepresentations. Example 3 (Non irreducible representation). Let S ...


Quantum Computation and Quantum Information – Lecture 2
... The basic idea is that Alice and Bob can perform a sequence of operations on their qubits to “move” the quantum state of a particle from one location to another The actual operations are more involved than we have presented here; see the standard texts on quantum computing for details ...
... The basic idea is that Alice and Bob can perform a sequence of operations on their qubits to “move” the quantum state of a particle from one location to another The actual operations are more involved than we have presented here; see the standard texts on quantum computing for details ...


Exact Numbers
... ► Scientific notation is a convenient way to write a very small or a very large number. ► Numbers are written as a product of a number between 1 and 10, times the number 10 raised to power. ► 215 is written in scientific notation as: 215 = 2.15 x 100 = 2.15 x (10 x 10) = 2.15 x 102 Chapter Two ...
... ► Scientific notation is a convenient way to write a very small or a very large number. ► Numbers are written as a product of a number between 1 and 10, times the number 10 raised to power. ► 215 is written in scientific notation as: 215 = 2.15 x 100 = 2.15 x (10 x 10) = 2.15 x 102 Chapter Two ...

Physics I Math Assessment with Answers
... A. It is impossible to solve this equation except with numerical techniques because it involves the reciprocals of polynomials and there is no general formula for that. B. There is exactly one solution and it can be found using a linear equation. C. There are exactly two solutions that are found usi ...
... A. It is impossible to solve this equation except with numerical techniques because it involves the reciprocals of polynomials and there is no general formula for that. B. There is exactly one solution and it can be found using a linear equation. C. There are exactly two solutions that are found usi ...



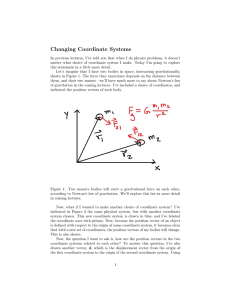
Changing Coordinate Systems
... If we don’t like these ideas, there are two possible ways we can think about getting around them. One idea might be to generalize Newton’s laws. Maybe there is a more general law, which takes into account all possible types of frames, and the form of this equation always stays true, no matter what. ...
... If we don’t like these ideas, there are two possible ways we can think about getting around them. One idea might be to generalize Newton’s laws. Maybe there is a more general law, which takes into account all possible types of frames, and the form of this equation always stays true, no matter what. ...




Angle Matrix Elements
... are called three-j symbols. They are available in Mathematica, but one can also get them by a search of the internet. In any case, just treat them as another integral that you look up in tables. The symbol vanishes unless m1 + m2 − m03 = 0 and |j1 − j3 | ≤ j2 ≤ j1 + j3 Some special cases that occur ...
... are called three-j symbols. They are available in Mathematica, but one can also get them by a search of the internet. In any case, just treat them as another integral that you look up in tables. The symbol vanishes unless m1 + m2 − m03 = 0 and |j1 − j3 | ≤ j2 ≤ j1 + j3 Some special cases that occur ...


